
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Огляд досліджуваного об'єкта
- 3.1 Огляд супутникової антени
- 3.2 Огляд датчиків і електроприводу
- 3.3 Огляд мікроконтролера Arduino
- 4. Мої розробки
- 4.1 Принципова схема
- 4.2 Алгоритм керування
- Висновок
- Перелік посилань
Вступ
Важко уявити будь-яке сучасне виробництво без використання систем автоматизації і промислових регуляторів.
В даний час найбільш часто використовуваним регулятором на технологічному виробництві є пропорційно-інтегрально-диференціальний регулятор (ПІД-регулятор). Існує достатньо методик налаштування ПІД-регулятора на технологічний процес, проте традиційний метод ПІД-регулювання не може забезпечити прийнятну якість керування при мінливих характеристиках сировини і матеріалів, дефіциті обслуговуючого персоналу і середній якості використовуваного обладнання. Тому виникає потреба в розробці нових алгоритмів адаптивних ПІД-регуляторів. Аналіз літературних джерел показує, що проблема адаптивного регулювання привертає все більшу увагу не тільки у вітчизняних і зарубіжних фахівців, розробників засобів і систем автоматизації, а й у споживачів цих коштів.
При керуванні складними об'єктами, що функціонують в умовах нестаціонарності, широке застосування знайшли адаптивні регулятори, що реалізують типові ПІ- або ПІД-закони регулювання. Адаптивні контролери зарубіжних і вітчизняних виробників: Ремиконт, Овен, Сіменс, Мікрол і т.д., як правило, реалізують метод Циглера-Ніколса. Слід зазначити, що даний метод передбачає виведення об'єкта в область автоколивань, за рахунок переходу на П-закон і грубого варіювання коефіцієнта посилення Кр. Однак, значний ряд технологічних процесів за умовами експлуатації не допускають автоколивального режиму.
Адаптивністю називають здатність системи змінюватися при зміні зовнішніх умов так, щоб мета функціонування системи була досягнута, навіть якщо зміни зовнішніх умов перешкоджають цьому. Якщо не тільки вихідна величина об'єкта змінюється внаслідок зовнішніх причин, а й динамічні властивості об'єкта також змінюються в часі, то потрібна додаткова адаптивна властивість системи, яка забезпечує узгодження динамічних властивостей основного контуру до мінливих динамічних властивостей об'єкта. Системи, що реалізують цей принцип, називаються адаптивними.
При проведенні багатьох фізичних експериментів необхідно забезпечити переміщення досліджуваних об'єктів з мінімальними кутовими відхиленнями їх робочих площин. Рішення задач керування складними технічними системами або об'єктами засновано на розробці їх математичних моделей, які визначають подальший алгоритм регулювання.
1. Актуальність теми
Актуальною проблемою сучасної теорії і практики керування є створення, розробка і вдосконалення нових перспективних підходів до вирішення завдань керування складними динамічними об'єктами. Прикладами подібних об'єктів можуть бути літальні і космічні апарати, маніпуляційні та мобільні роботи, автономні і телекеровані підводні апарати, різні технологічні установки і процеси, верстати та ін. Однією з найважливіших завдань підприємств, що функціонують в жорстких умовах ринкової економіки, є інтенсифікація виробництва, підвищення якості продукції і зниження енергетичних витрат на основі всебічного застосування досягнень науково-технічного прогресу.
2. Мета і завдання дослідження, плановані результати
Метою є: розробка системи позиціонування супутникової антени з урахуванням нелінійності об'єкта керування і особливостей слідкуючих систем.
Завданням данного проекту є:
- Провести огляд супутникової антени;
- Провести огляд датчиків та електроприводу;
- Провести огляд мікроконтролеру Arduino;
- Спроектувати структуру системи керування;
- Розробити принципову схему;
- Розробити алгоритм керування.
Основним шляхом вирішення поставлених завдань є забезпечення широкого застосування мікропроцесорних контролерів та ПЕОМ для створення АСУТП або окремих систем автоматичного керування складними об'єктами керування. Основне завдання полягає в тому, що результати магістерської роботи і застосування їх на реальному пристрої повинні показати, чи доцільно впроваджувати таку систему в широке застосування, повинні будуть показати всі переваги і недоліки даного підходу.
3. Огляд досліджуваного об'єкта
В даному розділі буде проведено огляд супутникової антени. І також, крім пристрою супутникової антени, розглянуто мікроконтролер, датчики і двигуни, які необхідні для реалізації даного проекту.
3.1 Огляд супутникової антени [4]
Супутникова антена (антена супутникового зв'язку) – антена, яка використовується для прийому і (або) передачі радіосигналів між наземними станціями і штучними супутниками Землі, в більш вузькому значенні – антена, яка використовується при організації зв'язку з ретрансляцією через супутники. В супутниковому зв'язку використовуються різні типи антен, найвідоміші – дзеркальні параболічні антени (супутникові тарілки), масово застосовуються для прийому супутникового ТБ-мовлення і в супутниковому зв'язку. В залежності від призначення системи супутникового зв'язку можуть застосовуватися і інші типи антен.
Супутникові антени бувають:
- Слабоспрямовані антени:
- Антени біжучої хвилі:
- Дзеркальні антени:
- Осесиметричні антени:
Слабонаправлені (також всеспрямовані) антени використовуються для зв'язку через низькоорбітальні і геостаціонарні супутники в супутникових телефонах, супутниковому радіо, прийомі сигналів систем супутникової навігації та інших пристроїв, де немає можливості безперервно орієнтувати антену.
Такі антени мають широку діаграму спрямованості, що призводить до прийому великої кількості шумів (високої шумової температури антени) малого відношення сигнал / шум для корисного сигналу на вході приймача, а отже і до низької пропускної здатності системи в цілому.
Антени біжучої хвилі і близькі до них (спіральні, хвильовий канал, логоперіодичні і т. д.) застосовуються в діапазонах метрових (англ. VHF) і дециметрових (англ. UHF) хвиль для прийому телеметрії і зв'язку з супутниками на низьких орбітах, обміну інформацією з метеорологічними супутниками, в аматорському радіозв'язку через супутники, для деяких спеціальних видів супутникового зв'язку.

Рисунок 3.1 – Антена УКХ-зв'язку з космічними кораблями

Рисунок 3.2 – Антена прийому телеметрії і стеження за супутниками
Дзеркальні антени – найбільш поширений клас супутникових антен. Застосовуються в різних діапазонах, від дециметрових хвиль до Ka-діапазону, і на різних типах станцій – від систем індивідуального ТБ-прийому до центрів космічного зв'язку. Можуть мати розмір від десятків сантиметрів до десятків метрів.

Рисунок 3.3 – Антени NEC Mark IV (32 метра, праворуч) і ТНА-57 (12 метрів, лівіше) в Центрі космічного зв'язку Дубна
Один і той же рефлектор (дзеркало) може використовуватися в різних діапазонах частот при установці на нього різних опромінювачів і виконання вимог по точності виготовлення дзеркала для сигналу максимальної частоти (короткохвильового) з використовуваних діапазонів. Чим в більш високочастотному діапазоні використовується антена, тим вуже її діаграма спрямованості і вище посилення при одному і тому ж розмірі дзеркала.
Крім рефлектора і опромінювача до складу антени входить опорно-поворотний пристрій, за допомогою якого проводиться наведення антени на супутник.
Осесиметричні антени мають симетричне дзеркало, фокус якого розташовани на осі симетрії. У прямофокусній антені (англ. Prime Focus) опромінювач встановлюється в точці фокусу перед дзеркалом.

Рисунок 3.4 – Прямофокусна антена для прийому супутникового ТБ
Фазовані антенні решітки:
Фазовані антенні решітки (ФАР) використовуються для створення компактних антен різних діапазонів.
На основі ФАР будуються в основному супутникові антени з малою апертурою. Такі антени мають ряд обмежень. Вони можуть працювати тільки в одному вузькому діапазоні частот (наприклад, робота у всьому діапазоні від 10.7 до 12.75 ГГц з однією антеною на базі ФАР неможлива), складні в розробці і виготовленні, і мають більш високу ціну. На базі ФАР можливо створювати компактні супутникові термінали, вони використовуються в складі носимих і рухливих станцій діапазонів Ku і Ka, портативних терміналів Inmarsat BGAN (L-діапазон), носимих супутникових станцій військового призначення.
Також на базі ФАР випускаються плоскі компактні антени для домашнього прийому супутникового ТБ, які вимагають для установки набагато менше місця, ніж класичні тарілки порівняної апертури і це дозволяє розміщувати їх не тільки на вулиці, але і в приміщенні (на вікні, балконі, лоджії і т. п.) за умови, що місце установки забезпечує видимість супутника.
Принцип дії, керування:
Для роботи через супутник перш за все необхідно, щоб між антеною та супутником забезпечувалась пряма видимість (не було перешкод, що заважають проходженню радіосигналу). При виконанні цієї умови слабоспрямовані антени наведення не вимагають. Спрямована антена повинна бути орієнтована таким чином, щоб напрямок на супутник збігався з максимумом її діаграми спрямованості. Малі антени в низькочастотних діапазонах (L, C) мають широку діаграму спрямованості. Наприклад, для портативного терміналу Inmarsat BGAN ширина ДН від 30 до 60 градусів. Таку антену досить грубо зорієнтувати в потрібному напрямку, щоб супутник потрапляв в обмежений її діаграмою сектор. Антени з вузькою діаграмою спрямованості і високим посиленням вимагають максимально точного наведення.
Елементи супутникової антени [5]:
Комплект апаратури для прийому програм з будь-якого супутника складається мінімум з трьох основних елементів: антена, конвертер, ресивер.
Супутникові антени бувають різних типів, але основними і найбільш використовуваними є антени з дзеркалом у вигляді параболоїда обертання, які в свою чергу діляться на два основні класи: прямофокусні і офсетні. Всі інші типи супутникових антен є вельми екзотичними і зазвичай поступаються параболічним за співвідношенням ціна/якість.
Супутникова антена складається з дзеркала, елементів кріплення конвертера і підвіски. Існує два типи підвісок: азимутально-кутомісцева і полярна. Антени з азимутально-кутомісцевой підвіскою дозволяють настроїти антену на будь-якой супутник і жорстко її зафіксувати. Полярна підвіска дозволяє перенацілювати антену з одного супутника на інший за допомогою важеля-актуатора з електричним приводом. Така система дозволяє приймати понад сотні телевізійних програм. Назва цього типу підвіски виникла через те, що вісь, навколо якої в цьому випадку обертається антена, виходить спрямованою на Полярну зірку.
Конвертер – це невеликий електронний блок, який знаходиться у фокусі антени і збирає електромагнітний сигнал, відбитий від поверхні дзеркала антени, потім підсилює і перетворює його таким чином, щоб можна було передати по кабелю. Важливою характеристикою будь-якого конвертера є величина додаткового шуму, який він вносить в прийнятий сигнал. Для конвертерів Ku-діапазону шум вимірюється в децибелах (dB). Зараз мають поширення конвертори з шумом від 0.5 до 0.2 dB. Шум конвертерів С-діапазону вимірюється в градусах Кельвіна (К). Ця величина лежить зазвичай в межах від 11К до 18К. Чим менше шум конвертера, тим він менше вносить спотворень в телевізійний сигнал і тим дорожче відповідно, кошту.

Рисунок 3.5 – Супутникова антена з механізмом переміщення
За допомогою актуатора можливо приймати сигнал з усіх доступних супутників на одну антену.
Полярний підвіс – механічний пристрій для повороту супутникової антени на потрібну позицію. Його можливо використовувати на антені великого діаметру. До нього часто під'єднують двигун.
Актуатор – електричний пристрій з одним двигуном що призводить до руху антени на полярній підвісці.
Мотопідвіс – пристрій для руху супутникової антени де двигун (актуатор) і підвіс – єдине ціле. Зазвичай його використовують для офсетних антен розміром до 1.3 метра. Живлення електроприводу береться від телевізійного кабелю (13/18 вольт).
Позиционер – центр керування поворотом антени. Запам'ятовує позиції супутників і подає живлення на актуатор до тих пір, поки не з'явиться потрібний сигнал з супутника.
Здається, що такого виду наладка дуже складний процес, але насправді її може виконати будь-який досвідчений установник. Головне ретельно розібратися в основних принципах роботи поворотного механізму для супутникової антени [7] .
Як відомо, всі супутники розміщені на геостаціонарній орбіті, на нульовий широті навколо екватора. Таке розміщення називають поясом Кларка. Супутники завжди на одному місці відносно земної поверхні. З землі ж їх видно від заходу на схід до горизонту як би півколом:

Рисунок 3.6 – Процес настройки
Кріпимо кронштейн строго вертикально по рівню, на ньому встановлюємо антену з поворотним механізмом.
Далі встановлюємо вісь горизонтального обертання, нульову позицію, строго на південь – АЗИМУТ
. Легко визначити за допомогою карти. На ній взяти точку установки антени і провести лінію на південь. Орієнтуємося по вулицям, будинкам.
Компас може і допустити помилку, але їм теж можна користуватися. Найлегше налаштувати на супутник з параметрами місця установки по довготі (меридіану). Так як позиції супутників визначають по довготі, на території з тим же меридіаном супутник буде розміщений строго в позиції південь-північ (для північної півкулі – на півдні). Наприклад Москва довгота 37oE – налаштовуємо на Eutelsat 36.0oE.
ЕЛЕВАЦІЯ
– кут, на який нахилена полярна вісь відносно вертикалі. Налаштування кута елевації – основа настройки мотопідвісу. Кут елевації легко визначити так: 90 градусів – широта місця прийому. Але кута елевації мало і підвіс потрібно ще нахилити на кут деклінації.

Рисунок 3.7 – Остаточне налаштування
Якщо по простому, то це і є основна настройка підвісу супутникової антени.
Ставимо підвіс в нульову позицію – південний супутник і легко, спочатку піднімаємо, а потім схиляємо антену простим зусиллям рук.
Якщо сигнал збільшується при подачі вгору, це швидше за все результат провисання підвіски і мотора під власною вагою. В такому випадку просто регулюємо кут елевації і досягаємо максимального сигналу.
Коли ж сигнал збільшується при напорі на антену вниз, то швидше за все це результат неточної установки кутів або не вертикальність кронштейна. Теж її можна відрегулювати кутом елевації.
Далі переходимо до налаштування крайніх, однаково віддалених від південного, супутників. Налаштувавшись на потрібний супутник – запам'ятовуємо зміни сигналу при подачі антени вгору і вниз. Далі повертаємо на інший супутник і проробляємо ті ж маніпуляції.
Автоматичний супровід супутника [1] – безперервне утримання його в максимумі діаграми спрямованості при русі щодо антени. Автосупроводження може здійснюватися як моторними приводами антени, так і електронним керуванням діаграмою спрямованості. Для автосупроводження потрібен контролер, що керує наведенням антени. Автосупроводження застосовується в наступних випадках:
- Станції для зв'язку в русі, що встановлюються на транспортних засобах (автомобілях, поїздах, судах, літаках). При русі положення антени щодо супутника безперервно змінюється і потрібне її утримання (стабілізація) в потрібному напрямку. Для утримання направлення на супутник на рухомих об'єктах використовуються два метода. Перший – безперервне визначення напрямку, в якому зміщується супутник щодо антени, шляхом постійного сканування в вузькому секторі, що не приводить до істотного погіршення сигналу. Другий – утримання положення антени за допомогою гіроскопів і датчиків прискорень.
- Великі антени, ширина діаграми спрямованості яких порівнянна з можливим відхиленням геостаціонарного супутника від точки стояння. При використанні такої антени без системи супроводу рівень сигналу буде змінюватися протягом доби відповідно до видимого руху супутника на небосхилі. Контролер автосупроводження відстежує рівень прийнятого з супутника сигналу і підводить антену так, щоб він був максимальним. Для стабільного утримання використовується програмне передбачення видимого зміщення супутника на підставі раніше накопичених даних і елементів його орбіти.
Антени для роботи з супутниками на негеостаціонарних орбітах. Супутник, що знаходиться на будь-який орбіті, крім геостаціонарної, безперервно рухається щодо земного спостерігача. Швидкість і траєкторія руху залежать від параметрів орбіти. При використанні спрямованих антен для роботи з такими супутниками потрібен їх постійний супровід, яке здійснюється на основі інформації про місцезнаходження станції і елементах орбіти супутника і може коригуватися по прийнятому сигналу.
Рисунок 3.8 – Обертання супутникової антени [gif-анімація. 20 кадрів, затримка 0,1сек, вічний повтор]
3.2 Огляд датчиків і електроприводу
Автоматизація полягає в використанні датчиків:
Інкрементальний енкодер:
За допомогою нього визначається, наприклад, положення валу електричного двигуна. У зв'язку з тим що кожен пристрій, в якому застосовується обертання, обов'язково повинно бути оснащено приладом, який контролює точність обертального моменту, популярними сферами використання подібних перетворювачів є системи точного переміщення. Основна мета, з якою застосовується енкодер, – це вимір кута повороту об'єкта під час обертання. Енкодери незамінні в процесі виробництва на верстатобудівних підприємствах, в робототехнічних комплексах.
Енкодер – це датчик, який застосовується в промисловій галузі з метою перетворення підконтрольної величини в електричний сигнал. Використовують їх також у багатьох сучасних вимірювальних приладах, які потребують реєстрації високоточних вимірювань кутів, обертання, поворотів і нахилів [8].
Інкрементальний енкодер простий по конструкції, але при цьому не показує конкретне місце положення своєї ручки. Він показує тільки напрямок повороту, а число поділок повороту повинен рахувати мікроконтролер [10].
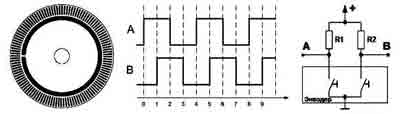
Рисунок 3.9 – Інкрементальний енкодер
Тип досліджуваного двигуна з вбудованим енкодером:
DC motor: JGB37-3530A-12V-111rpm [13]

Рисунок 3.10 – Двигун постійного струму з енкодером [14]
Принцип роботи енкодера:
Енкодери складаються з 2-х функціонально закінчених вузлів – джерела оптичного випромінювання і приймача цього випромінювання. Джерело оптичного випромінювання (передавач) і приймач можуть бути в одному корпусі або в різних корпусах.

Рисунок 3.11 – Енкодер: 1 – Підлаштувальний механізм; 2 – Індикатор; 3 – Генератор; 4 – Випромінювач; 5 – Корпус; 6 – Електронний ключ; 7 – Підлаштувальний елемент; 8 – Фотоприймач; 9 – Підсилювач; 10 – Граничний елемент; 11 – Індикатор
Гідності ДПС [1]:
- простота конструкції;
- легкість в керуванні;
- можливість регулювання частоти обертання валу;
- легкий запуск (особливо у двигунів з послідовним збудженням);
- можливість використання як генераторів;
- компактні розміри.
Обгрунтування:
- Більш простий в експлуатації;
- Його точність, в даному випадку, задовільняє поставленій задачі;
- Не зберігає інформацію з попередніх запусків, після відсутності живлення і не рахує імпульси на стоячому валу;
- У такого енкодера відлік кута повороту починається з нуля, а не на значенні з моменту виключення, для складання програмного коду це дуже зручно;
- Зручне розташування на валу двигуна;
- Надійна конструкція;
- Низька ціна.
Фоторезистор [16]:
Фоторезистори дають можливість визначати інтенсивність освітлення. Вони маленькі, недорогі, вимагають мало енергії, легкі у використанні, майже не схильні до зносу. Саме через це вони часто використовуються в іграшках, гаджетах і пристроях. Звісно, DIY-проекти на базі Arduino не могли оминути своєю увагою ці чудові датчики.
Фоторезистори за своєю суттю є резисторами, які змінюють свій опір (вимірюється в Ом) в залежності від того, яка кількість світла потрапляє на їх чутливі елементи. Вони дуже дешеві, мають різні розміри і технічні характеристики, але в більшості своїй не дуже точні. Кожен фоторезистор поводиться трохи інакше в порівнянні з іншим, навіть якщо вони з однієї партії від виробника. Відмінності в показаннях можуть досягати 50% і навіть більше. Так що розраховувати на прецизійні вимірювання не варто. В основному їх використовують для визначення загального рівня освітленості в конкретних, локальних
, а не абсолютних
умовах.
Фоторезистори є відмінним вибором для вирішення завдань на зразок: навколо темно або світло
, чи є щось перед датчиком (що обмежує надходження світла)
, яка з ділянок має максимальний рівень освітленості
.
Прозоре покриття всієї поверхні
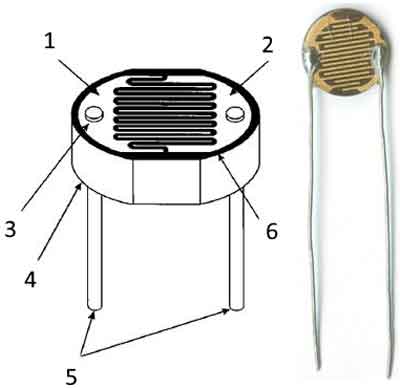
Рисунок 3.12 – Типова конструкція фотоелемента з пластиковим покриттям: 1 – 1-й електрод; 2 – 2-й електрод; 3 – Контакты холодного шва; 4 – Конденсатор; 5 – Провідні клеми; 6 – Фотопровідний матеріал поверхні
3.3 Огляд мікроконтролера Arduino [18]
Arduino UNO R3 використовується як виконавчий механізм програмованого мікроконтролера, який цілком і повністю справляється з поставленим для нього завданням.
Характеристики:
| Мікроконтроллер | ATmega328 |
| Робоча напруга | 5 В |
| Напруга живлення (рекомендована) | 7-12 В |
| Напруга живлення (гранична) | 6-20 В |
| Цифрові входи / виходи | 14 (6 з яких можуть бути використано як ШІМ-виходи) |
| Аналогові входи | 6 |
| Максимальний струм одного виводу | 40 мА |
| Максимальний вихідний струм виводу 3.3 V | 50 мА |
| Flash-пам'ять | 32 кБ (ATmega328) з яких 0,5 кБ використовуються завантажником |
| SRAM | 2 кБ (ATmega328) |
| EEPROM | 1 кБ (ATmega328) |
| Тактова частота | 16 МГц |
Примітка: мікроконтролери ATmega8, 168 або 328 повністю сумісні між собою за виводами.
Переваги плати Arduino [2,3].
- Arduino IDE заснована на AVRGCC. Вивчення Arduino допоможе вивчити C++. Якщо не підходить конкретна високорівнева команда або бібліотека для Arduino, майже завжди можна замінити її на аналогічну C++.
- Можливо живити, програмувати і обмінюватися повідомленнями з Arduino за допомогою одного USB кабелю (або FTDI кабелю для деяких клонів).
- Готовність до використання (Ready to Use) – є найбільшим плюсом Arduino. Вже є
на борту
регулятор живлення, мікроконтролер, програматор, інтерфейси для підключення пристроїв і програмні бібліотеки. Що значить не потрібно думати про програмування мікроконтролера або способи підключення периферії. Немає необхідності вивчати регістри мікроконтролера, діаграми, блок-схеми і набір інструкцій. Для роботи з мікроконтролером слід просто підключити Arduino до USB порту ПК і можна приступати до роботи. - Можна зробити простий проект за кілька хвилин, використовуючи стандартні бібліотеки, не вникаючи в них. Для зчитування сигналів кнопок, виведення інформації на семисегментні або ЖК-дисплеї та керування двигунами, для всього цього є стандартні бібліотеки, які не потребують великого досвіду в програмуванні.
- Послідовні і SPI інтерфейси зв'язку зроблені чудово.
- Легко зрозуміти, як все працює. Від простого до складного, від миготіння світлодіодом до метеостанції.
- Ще одною великою перевагою Arduino є бібліотека прикладів що йде в комплекті. Те, чого немає в постачанні, легко знаходиться в інтернет, всі бібліотеки є загальнодоступними, не буде потрібно багато кодувати.
- Є багато інтернет-форумів по темі Arduino. Інженери, любителі і професіонали активно діляться своїми проектами на Arduino. Можна легко знайти допомогу. До того ж сам сайт Arduino пояснює кожну функцію.
Обгрунтування: Даний контролер обраний з об'єктивних причин [19]:
- Arduino Uno прийнятний в ціні;
- Має простий програмний пакет;
- Проста конструкція;
- Широке застосування роботи з різними операційними системами;
- Універсальний форм-фактор. Розташування пінів на цій платі де-факто стало стандартом, і більшість модулів (шилдів) для Arduino випускається саме під Arduino UNO.
- Більшість готових скетчів і бібліотек працює під UNO. Незважаючи на те, що в Pro Mini використовується той же мікроконтролер, завантажувачі в них відрізняються – відповідно відрізняються і прошивки. Як і в інших Arduino на цьому ж чипі. Хоча в основному бібліотеки сумісні.
Висновок: Мікроконтролера Arduino Uno досить для виконання поставленого завдання.
4. Мої розробки
4.1 Принципова схема
Дана принципова схема складається з елементів:
- Виконавчий механізм, який являє собою двигун постійного струму;
- Перетворювач – понижуючий перетворювач напруги з 220/12 випрямлячів на вході (випрямляч являє собою поєднання двох однонапівперіодних випрямлячів);
- Датчик – інкрементальний датчик кута повороту (енкодер);
- Контролер – мікроконтролер Arduino UNO R3;
- Світлодіоди;
- Джерело живлення.
Опис схеми: живлення здійснюється від двофазної мережі змінного струму, проходячи через випрямляч, сигнал надходить на перетворювач DC/DC, потім цей перетворювач вже живить сам двигун. Мікроконтролер підключений до перетворювача, задаючи при цьому напрямок і ширину імпульсу (tімп..). Також перетворювач підключено до енкодеру, живлячи його і задаючи значення виходів. Є сигналізація, яка представлена у вигляді трьох світлодіодів проведених через опори для обмеження струму, що сигналізують про поданому сигналі на перетворювач з контролера. Двигун з датчиком з'єднані механічно.

Рисунок 4.1 – Принципова схема
4.2 Алгоритм керування
В даному алгоритмі присутні:
- Блок
початок
, який представляє собою початок циклу; - Блок завдання початкових змінних;
- Блок виконання дії, в якому формується помилка на поточному кроці;
- Блок виконання дії, в якому формується ПД-регулятор;
- Блок виконання дії, в якому формується помилка на попередньому кроці;
- Блок умов, в якому задається умови горіння діода. Якщо воно виконується, то світлова індикація буде горіти, інакше немає;
- Світлодіод землі буде горіти завжди, коли включено живлення;
- Запис аналогового входу ПД-регулятора;
- Виводом сигналів ШІМ з енкодера;
- Затримка на 10 мс;
Кінець
виконання циклу.
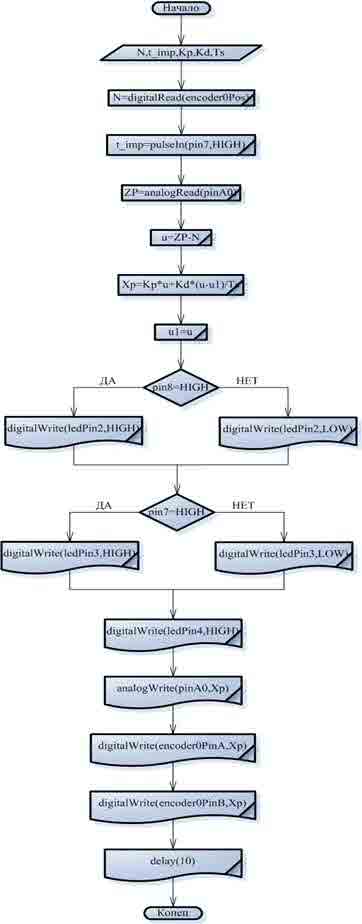
Рисунок 4.2 – Принципова схема
Висновок
В ході виконання даної роботи була спроектована система контролю повороту супутникової антени зі світловою індикацією. Було обрано обладнання для автоматизації, в тому числі мікроконтролер Arduino і інкрементальний енкодер. Також були спроектовані принципова електрична схема, алгоритм роботи програми і сама програма керування, написана на мові Arduino. Результати ще не оброблені і не застосовувалися на реальному пристрої.
| На момент здачі робота не була закінчена. Результати ще не оброблені і не застосовувалися на реальному пристрої. Повне закінчення планується на літо 2018. |
Перелік посилань
- Достоинства и недостатки ДПТ [электронный ресурс]. Режим доступа: http://zewerok.ru/.... Свободный
- Преимущества и недостатки использования Arduino [электронный ресурс]. Режим доступа: http://tim4dev.com/.... Свободный
- Преимущества Arduino UNO r3 [электронный ресурс]. Режим доступа: http://skproj.ru/.... Свободный
- Спутниковая антенна [электронный ресурс]. Режим доступа: https://ru.wikipedia.org/.... Свободный
- Спутниковое TV [электронный ресурс]. Режим доступа: http://sputnikovoetv.ucoz.com/.... Свободный
- Устройство мотоподвес [электронный ресурс]. Режим доступа: http://www.moy-sat-apparat.ru/.... Свободный
- Настройка мотоподвеса [электронный ресурс]. Режим доступа: http://satsputnik.ru/.... Свободный
- Энкодер – это... Инкрементальный энкодер [электронный ресурс]. Режим доступа: http://fb.ru/article/143314/.... Свободный
- Инкрементальные энкодеры [электронный ресурс]. Режим доступа: http://www.platan.ru/.... Свободный
- Виды энкодера [электронный ресурс]. Режим доступа: http://electrosam.ru/.... Свободный
- Принцип работы инкрементального энкодера [электронный ресурс]. Режим доступа: http://www.megasensor.com/.... Свободный
- Обработка множества инкрементальных энкодеров одновременно [электронный ресурс]. Режим доступа: http://easyelectronics.ru/.... Свободный
- Паспортные данные энкодера [электронный ресурс]. Режим доступа: https://id.aliexpress.com/.... Свободный
- Привод с энкодером [электронный ресурс]. Режим доступа: https://www.alibaba.com/.... Свободный
- Оптические датчики [электронный ресурс]. Режим доступа: https://dic.academic.ru/.... Свободный
- Фоторезисторы [электронный ресурс]. Режим доступа: http://arduino-diy.com/.... Свободный
- Оптический датчик [электронный ресурс]. Режим доступа: http://www.e-ope.ee/.... Свободный
- Ардуино УНО [электронный ресурс]. Режим доступа: http://arduino.ru/.... Свободный
- Преимущества Ардуино УНО [электронный ресурс]. Режим доступа: http://fb.ru/.... Свободный
- Подключение Ардуино [электронный ресурс]. Режим доступа: https://www.youtube.com/.... Свободный
- Подключение оптического датчика к Ардуино [электронный ресурс]. Режим доступа: http://robotclass.ru/.... Свободный
- Двухфазный выпрямитель [электронный ресурс]. Режим доступа: http://thebard.narod.ru/.... Свободный
- Оптические датчики [электронный ресурс]. Режим доступа: https://ru.wikipedia.org/.... Свободный