
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і завдання дослідження
- 3. Огляд систем навантаження електродвигуна
- 3.1 Навантажувальний пристрій по системі генератор-двигун (Г-Д)
- 3.2 Механічне навантаження (дискове або колодкове гальмо)
- 3.3 ДПС в режимі динамічного гальмування
- 3.4 Керована навантажувальна машина з використанням ДПС
- 3.5 Керована навантажувальна машина з використанням АД
- 4. Система управління навантажувальної машини
- 5. Навантаження електродвигуна
- 5.1 Активний момент
- 5.2 Реактивний момент
- 5.3 Квадратичний момент
- 6. Вибір мікроконтролера
- 7. Вибір датчиків струму
- Висновки
- Список джерел
Вступ
Сучасне виробництво складно уявити без електроприводу, так як він використовується практично на всіх етапах виробництва. Настільки широке застосування електропривод отримав завдяки своїй багатофункціональності і простоті у використанні. Під час роботи електродвигуна на нього діють моменти опору, що свідчить про його корисну працю, оскільки відсутність моменту опору говорить про те, що привід працює на холостому ходу, а в даному режимі привід не робить корисної роботи і просто споживає електроенергію з мережі живлення. Навантаження, що діє на двигун, може бути активного або реактивного характеру, може діяти з постійною величиною або змінюватися в процесі роботи двигуна, а також може діяти безперервно, або накладатися і зніматися стрибком.
1. Актуальність теми
Так як на електропривод під час його роботи будуть діяти моменти опору різного характеру, перед проектувальником стоїть завдання вибору потужності електродвигуна, величина якої забезпечувала б подолання навантаження, і при цьому двигун не споживав занадто велика кількість електроенергії. Адже вибір електродвигуна із занадто великим запасом по моменту призведе до невиправданих витрат електроенергії. Дану особливість необхідно враховувати при проектуванні всіх електродвигунів і систем. Для правильного вибору електродвигуна проектувальник проводить дослідження двигуна не тільки в режимі холостого ходу, але і під час його навантаження, тому необхідні спеціальні системи, що дозволяють відтворити реальну навантаження в лабораторних умовах, що свідчить про актуальність і важливість таких систем.
2. Мета і завдання дослідження
Метою даної роботи є розробка і реалізація системи навантаження електроприводу, яка дозволить створювати навантаження максимально наближену до реальної.
Створювана система повинна задовольняти таким вимогам як:
- Можливість контролювати величину навантаження в процесі роботи двигуна;
- Можливість створення навантаження, величина якої буде змінюватися за різними законами;
- Можливість фіксувати графіки фізичних величин досліджуваного двигуна і навантажувальної машини.
В якості контролера буде використовуватися сучасна мікропроцесорна техніка у вигляді отладочной плати stm32f4 discovery.
Для вирішення завдання необхідно підключити датчики струму на ефекті Холла, а також підключити і запрограмувати плату для управління системою в режимі реального часу.
3. Огляд систем навантаження електродвигуна
Системи навантаження використовувалися вже давно і використовуються досі. До систем навантаження можна віднести:
- Навантажувальний пристрій по системі генератор-двигун (Г-Д);
- Механічне навантаження (дискове або колодкове гальмо);
- ДПС в режимі динамічного гальмування;
- Керована навантажувальна машина з використанням ДПС;
- Керована навантажувальна машина з використанням АД.
3.1 Навантажувальний пристрій по системі генератор-двигун (Г-Д)
Дана система була дуже популярна раніше, так як дозволяє управляти величиною моменту опору з достатньою точністю. Така система використовується в лабораторії 8.101 для проведення лабораторних робіт і по сей день. Принципова схема навантажувального пристрою представлена на рисунку 3.1 [9].
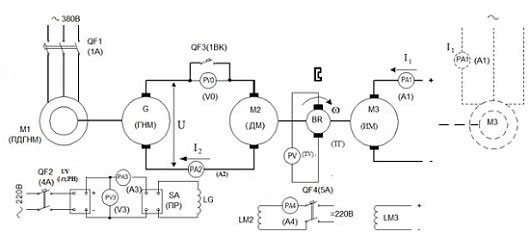
Рисунок 3.1 – Принципова схема навантажувального пристрою
Дана система дозволяє отримати дані для побудови необхідних характеристик досліджуваної і навантажувальної машини.
До складу такої системи входять:
- Досліджувана машини (ДМ);
- Навантажувальна машина (НМ);
- Генератора навантажувальної машини (ГНМ);
- Приводний двигун машини навантаження (ПДГНМ);
- Джерело регульованої напруги (ДРН).
В якості ВМ, НМ і ГНМ використовуються ДПС з незалежним збудженням, для ПДГНМ використовується АД з короткозамкненим ротором.
Вал ДМ (М3) механічно пов'язаний з валом навантажувальної машини (М2), яка живиться від ГНМ з приводним двигуном (М1).
Для проведення досліджень необхідно перш за все обмотки якоря і збудження ДМ, обмотки збудження НМ, а також статор ПДГНМ підключити до джерел живлення. В даному випадку ДМ буде працювати в режимі холостого ходу, так як НМ не створюватиме момент опору. Щоб ДМ працювала в руховому режимі, необхідно створити момент опору. Для цього необхідно підключити обмотку збудження ГНМ до ДРН, після цього ГНМ перейде в генераторний режим, і буде живити НМ. За допомогою ДРН змінюється величина струму збудження ГНМ, що призводить до зміни напруги живлення НМ, яке впливає на величину моменту опору ДМ.
Така система дозволяє досліджувати ДМ у всіх режимах роботи, навіть в генераторному, для цього досить поміняти полярність струму збудження ГНМ.
До переваг даної системи можна віднести:
- Можливість управління величиною моменту опору;
- Простий принцип роботи;
- Досить точне регулювання;
- Можливість стрибкоподібного прикладання навантаження в процесі роботи;
- Можливість формування активного моменту опору.
До недоліків системи відносяться:
- Складність конструкції і великі габарити (велика кількість двигунів);
- Відсутність можливості задавати зміна моменту опору з якого-небудь закону.
Незважаючи на свої переваги, така система знаходить обмежене застосування, так як вона не дозволяє в повній мірі дослідити роботу ЕП.
3.2 Механічне навантаження (дискове або колодкове гальмо)
Найпростіший спосіб навантаження двигуна – використання механічного гальма, який безпосередньо підключений до валу двигуна і своїми колодками (або дисками) стискає вал і, тим самим, створює момент опору досліджуваного двигуна.
Перевагами такої системи, є:
- Простота конструкції і малі габарити;
- Простий принцип роботи та управління;
- Невисока вартість.
Але через свої істотні недоліки застосування такої системи дуже обмежена, зокрема:
- Відсутня можливість стрибкоподібного прикладання навантаження в процесі роботи;
- Малий діапазон регулювання величиною навантаження;
- Відсутність можливості завдання навантаження по якому-небудь закону;
- Відсутність можливості формування активного моменту опору.
З огляду на дані недоліки застосування такої системи навантаження небажане.
Крім дискових і колодчатих гальм, як системи навантаження, можна використовувати електромагнітні муфти сухого або в'язкого тертя і муфти ковзання, а також порошкові муфти. Такі пристрої мають свої особливості (низький коефіцієнт корисної дії при малих швидкостях, малий передавальний момент, низька надійність при різкій зміні навантаження і значна інертність), але володіють тими ж недоліками, що і дискові і колодчатие, тому використовувати такі пристрої для системи навантаження небажано [6].
3.3 ДПС в режимі динамічного гальмування
Ще одним із способів створення навантаження на валу досліджуваної машини є використання в якості навантажувальної машини додаткового ДПС незалежного збудження, який працює в режимі динамічного гальмування.
Схема підключення машини навантаження представлена на рисунку 3.2. [10].
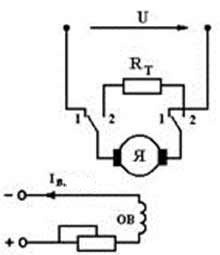
Рисунок 3.2 – Схема підключення машини навантаження в режимі ДГ
Сутність даного способу полягає у тому, що якірне коло машини навантаження замикається на гальмівний опір, що призводить до появи у якірному колі негативного струму (перехід в гальмівній режим), який створює момент опору для досліджуваної машини. Величина моменту опору контролюється шляхом зміни струму збудження НМ, збільшуючи струм збудження збільшується момент опору і, відповідно, навпаки – зменшення струму збудження призводить до зменшення моменту опору.
До переваг такої системи відносяться:
- Можливість контролю величини моменту опору з достатньою точністю;
- Можливість подачі навантаження практично стрибком;
- Проста конструкція і принцип роботи;
- Можливість підключення навантаження в процесі роботи;
- Можливість задавати зміна моменту опору за встановленим законом.
Але така система має істотні недоліки:
- Навантажувальна машина може працювати короткий проміжок часу. Даний недолік обумовлений тим, що під час динамічного гальмування в якірному колі протікає струм великої величини, що призводить до перегріву двигуна і двигун може вийти з ладу;
- Неекономічність. Така особливість системи обумовлена тим, що гальмівна енергія розсіюється на гальмівному резисторі у вигляді тепла.
Через те, що таку навантажувальну машину можна використовувати не довгий період часу, застосовувати таку систему недоцільно, так як в процесі дослідження доводиться тривалий час спостерігати за процесом роботи досліджуваного двигуна і неодноразово змінювати величину моменту опору для більш якісного аналізу.
3.4. Керована навантажувальна машина з використанням ДПС
В останні десятиліття спостерігається тенденція використання автоматизованих електроприводів як систем, що імітують реальне навантаження [11].
З розвитком мікропроцесорної техніки з'явилася можливість побудови більш складних і багатофункціональних систем управління електроприводу. Прикладом такої системи є навантажувальна машина на основі ДПС і тиристорного перетворювача (ТП).
Дана система в своєму складі має: реверсивний тиристорний перетворювач, ДПС з незалежним збудженням і систему автоматичного управління (САУ) з замкнутим контуром струму якоря.
Сутність такої системи полягає в тому, що програмно задається величина моменту і закон його зміни, який поступає на замкнутий контур регулювання струму і за допомогою ТП формується завдання на двигун.
Така система має явні переваги в порівнянні з іншими системами:
- Точне регулювання моменту опору;
- Можливість програмного завдання моменту, що змінюється за певним законом;
- Можливість формування активного і реактивного моменту опору, завдяки реверсивному ТП;
- Можна підключати навантаження в процесі роботи;
- Порівняно невеликі габарити.
Недолік такої системи є лише використанням ДПС, так як даний двигун має в своєму складі колектор, який є слабкою ланкою в двигуні постійного струму.
Завдяки своїм перевагам дана система буде використовуватися в магістерській роботі.
3.5. Керована навантажувальна машина з використанням АД
Найбільш сучасна система навантаження з усіх представлених. Дана система має такі ж переваги, як і система з ДПС, але вона має більш складну систему управління. Оскільки в системі використовується АД, то необхідно використовувати перетворювач частоти (ПЧ) з векторним керуванням, який має вищу ціну, ніж тиристорний перетворювач для ДПС.
Така система, так само як і система ДПС, дозволяє повністю контролювати величину моменту опору і закон його зміни, але через свою високу ціну і необхідності використовувати модуль рекуперації його застосування недоцільно.
У системах управління навантажувальної машиною з використанням керованого АД і ДПС, які жорстко з'єднані з валом досліджуваної машини, можна імітувати двомасову електромеханічну систему (і навіть багатомасову), що є серйозним аргументом в їх користі.
4. Система управління навантажувальної машини
Для управління навантажувальної машини буде використовуватися замкнута система зі зворотним зв'язком по струму.
Певна складність використання такої системи полягає в налагодженні регулятора. Система повинна відпрацьовувати завдання з необхідними швидкодією і точністю.
Структурна схема такої системи представлена на рисунку 4.1.
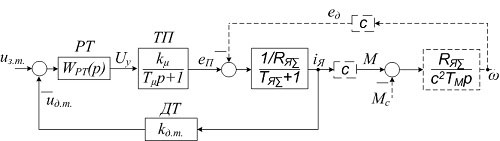
Рисунок 4.1 – Структурна схема контуру регулювання струму
У даній схемі використовуються такі позначення:
- WPT(р) – регулятор струму;
- kμ – коефіцієнт посилення ТП;
- Tμ – постійна часу ТП;
- eП – напруга на виході ТП;
- Uу – напруга управління на виході регулятора струму;
- uз.m.– сигнал завдання на формування струму двигуна;
- uo.m.– напруга на виході датчика струму;
- e∂ – проти-ЕРС двигуна;
- RЯ∑ – опір якоря;
- TЯ∑ – постійна часу якірного ланцюга;
- k∂.m. – коефіцієнт посилення датчика струму;
- iЯ – струм якоря;
- c – конструктивна стала двигуна;
- М і М з – момент двигуна і момент опору;
- T М – постійна часу механічного ланки;
- ω – швидкість обертання двигуна.
У даній системі буде використовуватися ПІ-регулятор струму, який при його правильному налаштуванні може забезпечити оптимальну за швидкодією і точності роботу системи.
Передавальна функція регулятора струму має такий вигляд:
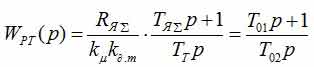
Так як контур струму буде налаштовуватися по модульному оптимуму, то постійна часу регулятора TT дорівнює:

Завдяки такій настройці контур струму буде відповідати всім вимогам, що пред'являються до системи управління, зокрема:
Час досягнення максимуму:
Час першого досягнення сталого значення:

Перерегулювання:

На рисунку 4.2 перехідна характеристика замкнутого контуру відображає всі показники якості.
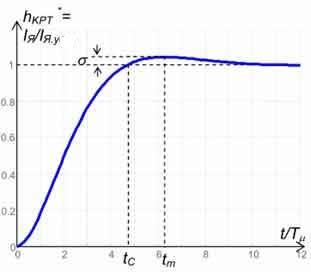
Рисунок 4.2 – Перехідна характеристика замкнутого контуру
Введення в систему управління електроприводу окремого регулятора струму дозволяє вирішити такі завдання:
- Шляхом компенсації інерційності в силовому контурі за рахунок дії регулятора струму формувати криву струму якоря iЯ = f(t) таким чином, щоб забезпечувався, можливо, більш швидке зростання струму при відсутності перерегулювання;
- Ефективно обмежувати максимальні значення струму при перевантаженнях, тому що контур струму є самим швидкодіючим;
- Ефективно обмежувати коливання струму і швидкості при коливаннях напруги мережі живлення [7].
5. Навантаження електродвигуна
Завданням моєї роботи, є реалізація навантажувальної системи електроприводу, яка забезпечить можливість створення максимально наближеного до реальності моменту опору. До таких моментів відноситься активний і реактивний момент, а також квадратичне навантаження.
5.1 Активный момент
Активними силами і моментами називаються такі, які створюються зовнішніми по відношенню до двигуна джерелами механічної енергії і не залежать від руху електроприводу (швидкості і напрямку). Такі сили і моменти мають місце при підйомі-спуску вантажів, вітрового навантаження на механізми повороту і пересування тощо [8].
На рисунку 5.1 спрощено показана кінематична схема вантажопідйомного механізму і його механічна характеристика.
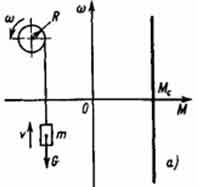
Рисунок 5.1 – Активний момент опору
Величина моменту сили тяжіння вантажу G дорівнює:

Сила тяжіння, як при підйомі, так і при спуску вантажу спрямована в одну сторону спуску і незмінна за величиною. Відповідно механічна характеристика виконавчого механізму ω = f(M C) в цьому випадку має вигляд прямої MC.акт = const [8].
5.2 Реактивний момент
Реактивними силами і моментами називаються сили і моменти опору руху, що виникають як реакція на активний рушійний момент, що розвивається двигуном, або будь-який інший активний рушійний момент, наприклад, обумовлений силою тяжіння або силою інерції. Реактивним моментом опору називають момент, який завжди спрямований протилежно по відношенню до напрямку обертання двигуна [8].
До таких моментів навантаження відносять навантаження сухого, в'язкого і вентильного тертя. На рисунку 5.2 механічна характеристика електропривода при дії моменту опору типу сухого тертя.
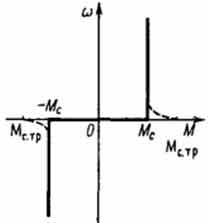
Рисунок 5.2 – Реактивний момент опору
Моменти сухого тертя незмінні за величиною, але змінюють свій знак відповідно до напряму обертання валу двигуна.
Момент опору в такому випадковий дорівнює:
5.3 Квадратичний момент
Квадратичним моментом опору називають момент, величина якого змінюється пропорційно квадрату швидкості обертання двигуна, тому навіть невелике зростання швидкості роботи приводу приводить до істотного зростання навантаження на двигун. Таке навантаження в процесі експлуатації зазнають насоси, вентилятори і компресори.
Момент опору в загальному вигляді дорівнює:
де: МH – номінальний момент двигуна; ωH – номінальна швидкість обертання двигуна; ω – поточна швидкості обертання двигуна.
6. Вибір мікроконтролера
Для реалізації поставленого завдання автоматизації була обрана плата STM32f4 discovery, яка забезпечить необхідну швидкодію, а також, завдяки наявності АЦП, дозволить отціфровивать аналогові сигнали струмів якоря досліджуваної і навантажувальної машини.
В процесі роботи плата буде формувати два сигнали управління, а також оцифровувати значення сигналів датчиків струму і датчика швидкості досліджуваної машини з можливістю їх подальшого спостереження.
Плата STM32F4 Discovery (рис. 6.1) призначена для ознайомлення з можливостями 32-бітного МК на основі ARM-архітектури, а також для реалізації власних пристроїв і додатків з використанням апаратного забезпечення плати [1].
Зовнішній вигляд даної плати представлений на рисунку 6.1 [2].
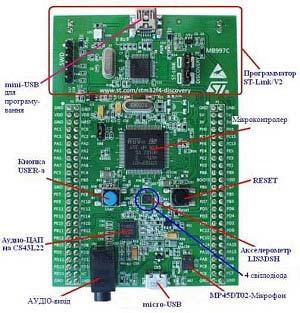
Рисунок 6.1 – Зовнішній вигляд плати STM32F4
Плата STM32F4 Discovery оснащена:
- Мікро контролером STM32F407VGT6 з ядром Cortex-M4F тактовою частотою 168 МГц, 1 Мб Flash-пам'яті, 192 кб RAM в корпусі LQFP100;
- Отладчиком ST-Link/V2 для налагодження та програмування МК;
- Живлення плати через USB або від зовнішнього джерела живлення 5 В;
- Вивідні колодки всіх контактів введення/виведення мікроконтролера для швидкого і простого підключення до макетної платі.
Таким чином, отладочна плата оснащена великою кількістю периферії, що дозволить реалізувати на ній систему навантаження [1].
Завдяки своєї макетної конструкції, плата stm дозволить підключити всі необхідні сигнали без використання пайки. Дана плата була обрана, оскільки може бути запрограмована за допомогою програмного пакету Matlab/Simulink, а також забезпечує достатню швидкодію. Для програмування використовується бібліотека Waijung, що дозволяє реалізувати поставлену задачу.
7. Вибір датчиків струму
В якості датчиків струму були обрані датчики струму на ефекті Холла фірми Allegro, які дозволять виміряти струми двигунів з високою точністю. Його зовнішній вигляд представлений на рисунку 7.1.

Рисунок 7.1 – Датчик струму фірми ALLEGRO серії ACS750
До переваг даного типу датчиків можна віднести:
- Висока напруга ізоляції 2500 В;
- Мале внутрішній опір 120 мОм;
- Похибка вимірювань менше 1%;
- Датчики на 50, 75 і 100 А;
- Розширений температурний діапазон -40 ... + 150o С;
- Датчик має інтегровану силову шину;
- Напруга на виході датчика пропорційно току на його вході;
- Можливість вимірювання постійного і змінного струму;
- Наявність гальванічної розв'язки [3].
- IP + і IP- – клеми для вимірювання струму;
- VCC – живлення датчика;
- GND – земля сигналу;
- VIOUT – аналоговий вихідний сигнал датчика.
- Датчик підключається обмотці якоря двигуна для вимірювання струму і підключається до плати STM для фіксації вимірювань. Схема підключення датчика представлена на рисунку 7.3.
- Так як в процесі роботи ДПС в його обмотках буде формуватися як позитивний, так і негативний струм, то необхідно використовувати датчик змінного струму.
- Для того щоб можна було фіксувати виміряне значення, вихід датчика підключається до АЦП плати STM, тому фіксоване значення буде представлено у вигляді набору чисел. Так як АЦП 12 біт, то для обчислення напруги після оцифровки слід скористатися формулою:
- Для перетворення напруги в струм необхідно скористатися формулою:
- Так як датчик даного типу чутливий до зовнішніх впливів, виміряне значення може мати великі шуми, тому для поліпшення вимірювання бажано використовувати RC-фільтр (рис.7.2).
- Бугаев В.И. Лабораторный практикум для изучения микроконтроллеров архитектуры ARM Cortex-M4 на базе отладочного модуля STM32F4 Discovery / В.И. Бугаев, М.П. Мусиенко, Я.М. Крайнык – Москва-Николаев: МФТИ-ЧГУ, 2013. – 71 с
- 32-разрядные микроконтроллеры STM и 8-и разрядные AVR, - электронный ресурс. Режим доступа: http://webstm32.sytes.net
- Датчики тока ACS750 фирмы Allegro: теория и практика / Александр Уткин. - Челябинск, - электронный ресурс. Режим доступа: https://www.soel.ru
- Thermally Enhanced, Fully Integrated, Hall Effect-Based Linear Current Sensor IC with 100 Current Conductor, - электронный ресурс. Режим доступа: http://files.amperka.ru
- Работа с датчиками тока на эффекте Холла: ACS758, - электронный ресурс. Режим доступа: https://geektimes.ru
- Электромагнитные муфты, - электронный ресурс. Режим доступа: http://electricalschool.info
- Системы управления электроприводами. Учебное пособие для студентов высших учебных заведений, - электронный ресурс. Режим доступа: http://arigato.do.am
- Ключев В.И. Теория Электропривода / В.И. Ключев. - Издательство Энергоатомиздат, 2001.-288 с.
- Чепак A.A. Методические указания к лабораторным работам по теории электропривода, часть первая / Сост.: А. А. Чепак, В.Ф.Борисенко. - Донецк: ДОННТУ, 2016., 62 с.
- Торможение ДПТ. Механические характеристики ДПТ в тормозных режимах, - электронный ресурс. Режим доступа: http://poznayka.org
- Буров А. Н. Экспериментальный стенд для исследования электрооборудования ветроэнергетических установок: структура и аппаратная реализация / А. Н. Буров - Вестник КрНУ имени Михаила Остроградского. - Кременчуг, КрНУ - 2015, Выпуск 2, с. 43-39
Завдяки наявності гальванічної розв'язки вихідний сигнал датчика можна безпосередньо підключити до АЦП мікроконтролера для подальшої обробки.
На рисунку 7.2 приведена схема підключення датчика [4].
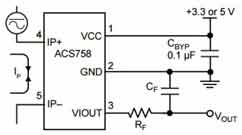
Рисунок 7.2 – Схема підключення датчика струму
Опис входів і виходів датчика наступне:
Принцип роботи датчика полягає в наступному: при протіканні струму 1А через виводи 4-5 датчика напруга на виході VIOUT датчика збільшується на величину зазначену в параметрах датчика.
Принцип роботи з датчиком полягає в наступному:
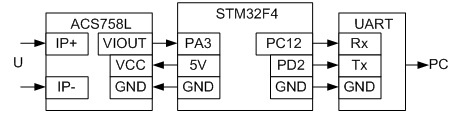
Рисунок 7.3 – Схема підключення датчика струму
Для вимірювання змінного струму у датчика присутня так звана точка відліку
. Ця точка відліку дорівнює 1/2 живлення (V CC). При позитивному значенні вимірюваного струму на виході датчика буде формуватися сигнал рівний 1/2VCC + I·0.02V
, а при негативному – 1/2VCC - I·0.02V
. На виході датчика формується синусоїда, де нуль
це 1/2VCC [5].
де: N – код на виході АЦП; 4096 – максимальний вихідний код.
де: U – напруга на виході датчика, В; 1/2VCC – нульова точка вимірювання, В; VS – зміна напруги виходу датчика на 1 А навантаження, В.
Висновки
В даному рефераті були розглянуті основні системи навантаження електродвигуна. Виявлено їх достоїнства і недоліки. Серед розглянутих систем перевага була віддана керованої машини навантаження з використанням ДПС, так як дана система задовольняє вимогам. В якості контролера буде використовуватися отладочная плата stm32f4 discovery, а в якості датчиків – датчики струму на ефекті Холла фірми Allegro.
Подальші дослідження буде направлено на реалізацію даної системи, з метою створення лабораторного стенду для дослідження двигуна в навантажувальних режимах.