
Реферат за темою випускної роботи
Содержание
- Вступ.
- 1 Вибір конструкції пристрою і створення 3D моделі.
- 2 Підбір обладнання.
- 2.1 Порівняння сервоприводів.
- 2.2 Вибір мікроконтролера і його порівняння з іншими.
- 2.3 Характеристики DC-DC перетворювача.
- Створення макета
- 3.1 Реалізація живлення пристрою.
- 3.2 Реалізація віддаленого управління.
- Висновки.
- Список джерел.
Вступ
Конструювання роботів досить трудомісткий процес, тому ми не бачимо їх всюди, в наших будинках. Але можливо ситуація зміниться з появою нового способу їх виробництва – 3D друку. [1] З використанням цієї технології витрати на створення і складання мінімальні і ніяких відходів. Ніколас Бартлет з Гарвардської школи інженерії і прикладних наук говорить, що 3D друк унікальний, тому, що допомагає контролювати внутрішні частини робота. Він і його команда використали технологію друку, щоб зробити м'якого робота, який може надувати свої ноги і стрибати вгору на висоту в шість разів більшу за його власну. Проте, за словами Пола Бирдсли з DisneyResearch в Цюріху, технологія не надає надійну структуру матеріалів.[1] Його команда використала 3D друк для створення коліс прототипу чотириколісного бота, який їздить по стінах. Дослідник говорить, що ще рано широко використовувати можливості 3D друку в створенні роботів.
У той же час, друк стає популярним в якості засобу виробництва протезів. Компанія Poppy Project
поширює 3D креслення для модульних протезів, а люди по всьому світу можуть надрукувати" протези за вартістю матеріалів- усі креслення знаходяться у відкритому доступі, що істотно здешевлює їх вартість.
Таке злиття технологій можливо дасть поштовх до поширення мобільних роботів по всьому світу.
При виготовленні нашого робота ми скористалися цим благом науково-технічного прогресу і повною мірою використали технологію 3D друку.
Проектування і розробку шагоходи можна розділити на:
Розробка:
Після виконання поставлених завдань було проведено налаштування шагоходу і проведений перший запуск отриманого пристрою. Більш докладно зупинимося на виконанні поставлених вище завдань.
1. Вибір конструкції пристрою і створення 3D моделі
При виборі конструкції спочатку ми зупинилися на чотириногом роботі з трьома ступенями свободи для кожної ноги. Це на нашу думку дозволило спростити проектування і виготовлення. Такий шагоход був нами виготовлений і проведені його випробування. Однак ці випробування показали, що конструкція виявилася нестійкою. Тому в конструкцію шагоходу були додані дві ноги які дозволяють отримати більш стійку конструкцію в зв'язку з тим, що при ходьбі у шестиного робота завжди є три точки опори і більш рівномірно розподілена маса. Також перехід до шестиногої конструкції спростив написання алгоритму роботи. За основу нашої 3D моделі була взята і перероблена модель чотириногого робота з internet в яку нами були додані дві ноги які допомогли нам досягти необхідної стійкості.
2. Підбір обладнання
Вибір і замовлення обладнання здійснювався нами виходячи з: необхідних технічних характеристик, габаритів і цінових показників. Результати аналізу ринку показали, що оптимальними за трьома показників є два приводи Tower Pro MG90 і Tower Pro MG90S micro servo 14g. Розрізнюються ці приводи матеріалом редуктора, обертаючий момент, вантажопідйомністю і ціною. Для більш легких і не навантажених роботів можливо використовувати Tower Pro MG90. Виходячи з власного досвіду, можу стверджувати, що цей привід хоч і не настільки потужний і ізносостійкий як MG90S, але він має більш високу якість. Висновок був зроблений виходячи з того що з 18 замовлених нами MG90S два сервоприводу виявилися бракованими і для того щоб не зупинятися на тривалий час були взяті доступні на той момент MG90. Встановлені вони були на крайніх сегментах ніг і відмінно впоралися зі своїм завданням.
2.1. Порівняння сервоприводів
Tower Pro SG90 micro servo 9g – легкий і якісний мікросервопрівод за низьку ціну. Просте керування за допомогою Arduino, AVR, PIC, ARM і інших мікроконтролерів.[2]

Tower Pro MG90
Характеристики:
Комплектація:
Можливе використання Tower Pro MG90S micro servo 14g – легкий і якісний мікросервопрівод. [3]

Tower Pro MG90S
Відрізняється від Tower Pro SG90 повністю металевим редуктором. Просте управління за допомогою Arduino, AVR, PIC, ARM і інших мікроконтролерів.
Характеристики:
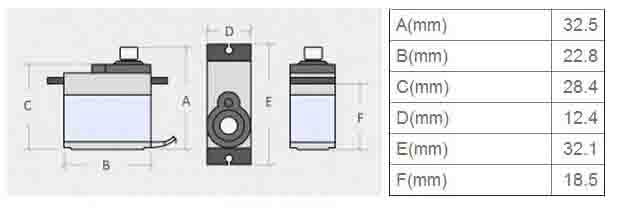
Розміри сервоприводу Tower Pro MG90S
Розрізняються ці приводу матеріалом редуктора, крутним моментом, вантажопідйомністю і ціною. Для більш легких і не навантажених роботів можна використовувати Tower Pro MG90 виходячи з власного досвіду можна стверджувати, що привід MG90 хоч і не настільки потужний і зносостійкий як MG90S але він має більш високою якістю а також дефектів. Висновок був зроблений виходячи з того що з 18 замовлених нами MG90S два сервоприводу виявилися бракованими і для того щоб не зупинятися на тривалий час були взяті доступні на той момент MG90. Встановлено вони були на крайні сегменти ніг і відмінно впоралися зі своїм завданням.
2.2. Вибір мікроконтролера, порівняння.
Для керування вибирали між двома мікроконтролерами Arduino Uno і Arduino nano v3. Arduino Uno R3 – це найбільш популярна плата з серії Arduino. Стандартний форм-фактор плати Uno дозволяє підключати до неї величезна кількість різних Шілд-плат, що розширюють можливості платформи.
Arduino Uno R3 побудована на базі мікроконтролера ATMega328P-PU. Як USB-UART перетворювача використовується мікросхема ATMega16U2. Потужності, обсягу пам'яті і кількості виводів Arduino Uno R3 досить для більшості завдань, які виникають в аматорській електроніці. [4]
Характеристики:
Arduino Nano v3.0 це компактна плата, побудована на мікроконтролері ATMega328. [5]
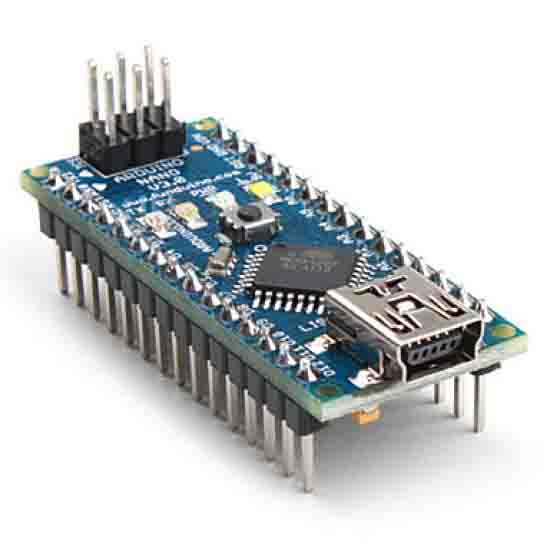
Arduino nano v3.0
Функціонально Arduino Nano схожа на Arduino Uno, але виконана в компактному форм-факторі і не сумісна з Arduino Шілд, але сумісна зі стандартними макетними і breadboard-платами. Також не має окремого роз'єму живлення. Підключення до комп'ютера здійснюється через роз'єм Mini-USB.
Характеристики:
Також були замовлені елементи необхідні для створення дослідного зразка: (провідники, макетна плата, що підвищує DC-DC перетворювач)
2.3 Характеристики DC-DC перетворювача
Варто докладніше розглянути характеристики DC-DC перетворювача.[6] Для проекту було обрано перетворювач DC-DC Step-Up підвищує LTC1871 100W. Перетворювач напруги підвищуючий, універсальний з цифровим табло і можливістю налаштування потрібної напруги від 3.5 до 35 вольт. Налаштування здійснюється підлаштуванням резистора. Цифрове табло відображає встановлені вхідні і вихідні напруги. Вхідна напруга має бути від 3-х до 35 вольт. Пристрій запам'ятовує
налаштовану вихідну напругу і незалежно від вхідної напруги буде перетворено у потрібну. Максимальний вихідний струм до 6 ампер.
Технічні характеристики:
3. Створення макета
Почавши вибір матеріалу для деталей макета, було вивчено чимало наукових робіт і статей, автори яких писали, що оптимальним для виготовлення деталей для роботів є алюміній, що підтверджують слова Пола Бірдслі з Disney Research, він говорив: «Поки надруковані 3D об'єкти не стануть міцнішими , такий матеріал, як алюміній залишається найкращим варіантом». [1] [1] Спираючись на прочитані статті пробний макет, був виготовлен з алюмінію. Але в процесі складання з'ясувалося, що деталі легко гнуться і погано склеюються за допомогою термоклея. Це був перший недолік створюваного макета. Після складання були проведені тести і кілька пробних включень, які показали те, що arduino nano не здатна забезпечити стабільну роботу 18-ти сервоприводів. Це був другий недолік в виготовленому макеті. Для усунення виявлених недоліків було зробленно:
Всі ці зміни були внесені в конструкцію пристрою, і було проведено налагодження, для чого був розроблен алгоритм керування шагоходом. Розроблена програма, дозволила, відпрацювати основні рухи (вперед, назад, вправо, вліво).
Налагодження показало, що конструкція і алгоритм керування розроблені вірно. Перші пуски проводилися з використанням лабораторного блоку живлення, що обмежувало можливості руху. Отже, наступним завданням було створення незалежного джерела живлення. Велика кількість проводів, що з'єднують різні елементи, не давало можливість отримати реальний вигляд пристрою. Вирішення цих завдань і стало наступним етапом роботи над пристроєм. Для зменшення зв'язків необхідно було замінити існуючий контролер arduino nano на arduino mega. Це пов'язано з тим що у Arduino MEGA2560 більше дискретних виходів (більше 18-ти),[8] це дозволить нам керувати всіма сервопріводамі незалежно один від одного. Раніше, використовуючи arduino nano такої можливості у нас не було, так як у неї всього 12 дискретних виходів. В зв'язку з цим доводилося керувати кількома приводами з одного дискретного виходу, що не дозволило нам налагодити незалежно кожен двигун.
Контролер Arduino MEGA2560 Pro Mini – компактна плата мікроконтролера, що базується на Atmega2560. За своєю суттю – це спрощений аналог Arduino Mega, що дозволяє здешевити проект. ATmega2560 працює на 16 МГц (0,5% допуску). [7]
Технічні характеристики:
Ще однією перевагою є розміри контролера.
Даний контролер буде встановлений в виготовлену друковану плату, яка є підсилювачем і розподільником живлення за елементами пристрою, що спростить монтажну схему.

Arduino MEGA2560 Pro Mini
3.1. Реалізація живлення
Є два варіанти реалізації живлення робота. Перший варіант паралельно з'єднати кілька літієвих акумуляторів тим самим збільшивши їх ємність і струм, а так само додати в цей ланцюг підвищуючий перетворювач. Так як робот від лабораторного блоку живлення споживає при 6V від 2.5-3.5А, перетворювач необхідно взяти з запасом по потужності.
Другий варіант полягає в тому, щоб з'єднати 2-3 акумулятора послідовно і знизити перетворювачем отриману напругу. Цей спосіб я вважаю неефективним, так як доступні на ринку перетворювачі мають низький ККД, сильно гріються і в продажу не вдалося знайти модель, яка би підходила по номінальному струму. Проаналізувавши обидва варіанти реалізації в прототипі, в якості джерела живлення будуть використані li-ion акумулятори 18650 і підвищуючий DC-DC перетворювач.
Після внесення необхідних змін в конструкцію, нами отримана більш якісна модель. Були проведені випробування в різних умовах роботи, тобто модель відпрацювала задані програмою пересування. Проведені випробування показали, що пристрій повністю відповідає встановленним завданням, зазначеним при проектуванні. Однак в даному стані у моделі немає функції віддаленого керування, що є важливим. Таким чином, наступним завданням стало створення пристрою для здійснення віддаленого керування шагоходом. Переглянувши доступні на даний момент Bluetooth модулі та їх характеристики, виявилося, що вони практично нічим не відрізняються крім швидкості передачі. У нашому пристрої цей параметр не є важливим. В якості такого пристрою вирішено використовувати Bluetooth-модуль HC-05.
3.2 Реалізація віддаленого управління Опис модуля
Опис модуля
Цей модуль являє собою плату розміром 2.7x1.4 см, з 34 виводами з кроком 1.5 мм, розташованих по периметру плати,[9] і має на одному з торців антену:

Bluetooth-модуль HC-05
На платі розташований чіп BC417 від компанії Cambridge Silicon Radio, який забезпечує апаратну підтримку стека Bluetooth 2.0 + EDR (Enhaced Data Rate), а також флеш-пам'ять ES29LV800DB-70WGI від Excel Semiconductor на 8 Мбіт (1 МБ), що зберігає прошивку і налаштування. З оригінальною китайською прошивкою модуль вміє працювати в двох режимах: простого радіоподовжувача UART
та керування AT-командами. У першому випадку все гранично просто – включаєш модуль, підключаєшся до нього з комп'ютера або іншого пристрою, який вміє створювати COM-порт по Bluetooth, і надсилаеш в цей порт дані. У другому режимі можна керувати модулем за допомогою AT-команд виду AT + КОМАНДА
– наприклад, команда AT + NAME?
. Ця команда дозволяє дізнатися ім'я модуля, але про це пізніше.
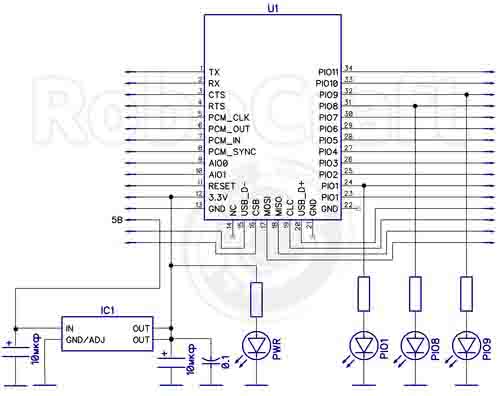
Для того, щоб підключити модуль, з'ясуємо призначення виходів:
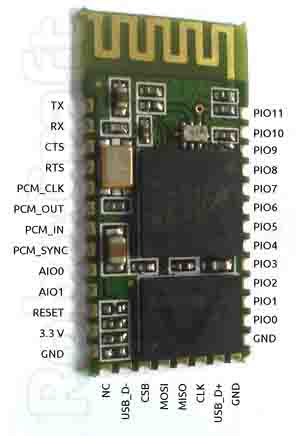
Схема модулю
Модуль живиться від 3.3 В, але його лінії I / O можуть працювати і з 5-вольтової логікою, що дозволяє підключати його UART до Arduino. Необхідно відзначити, що крок між виводами у модуля – 1.5 мм і для прототипування доведеться припаювати проводки або створювати друковану плату. Зупинилися на другому варіанті.

Друкована плата
Виготовлена друкована плата допомагає нам використовувати модуль на макетних платах бо до неї припаяна одинарна гребінка зі стандартним кроком і розпаяні всі необхідні радіодеталі для швидкого і легкого підключення до мікроконтролеру наприклад: на платі присутній стабілізатор на 3.3 В, так що можна живити модуль стандартною для Arduino напругою 5 В, підключивши живлення до виводу, позначеному 5V.
Принципова схема плати
Плата готова, приступимо до роботи з модулем. Ставимо breakout в макетну плату і підключаємо наступним чином:
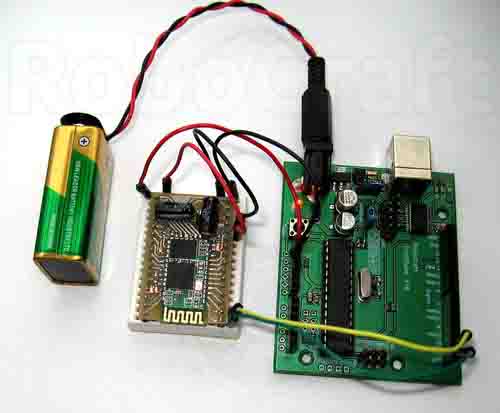
Зібранне устройство
Впровадження Bluetooth за описаною вище схемою дозволить нам керувати виготовленим пристроєм з android смартфона.
Висновки
У нашій роботі в повній мірі покроково описан процес створення робота-павука. Вказані всі компоненти і пристрої, застосовані в даному проекті. Обгрунтованість правильності обраних елементів і пристроїв підтверджена експериментально. Це дозволило створити робочий прототип робота на базі, якого можна створити масу корисних пристроїв для дослідження недоступного для людини навколишнього середовища. Так само, він може стати незамінним помічником для електриків. Ще одне його застосування, в якості стенду для навчання студентів основам роботобудування.
Перелик джерел
- 3D печать предвещает быстрое развитие робототехники // imolodec [Электронный ресурс]. – Режим доступа: http://imolodec.com.... свободный.
- Сервопривод Tower Pro MG90 // mini-tech [Электронный ресурс]. – Режим доступа: http://mini-tech.com.ua..., свободный.
- Сервопривод Tower Pro MG90S // mini-tech [Электронный ресурс]. – Режим доступа: http://mini-tech.com.ua..., свободный.
- Arduino Uno R3 // mini-tech [Электронный ресурс]. – Режим доступа: http://mini-tech.com.ua..., свободный.
- Arduino Nano v3.0 // mini-tech [Электронный ресурс]. – Режим доступа: http://mini-tech.com.ua..., свободный.
- Преобразователь DC-DC Step-Up LTC1871 100W // ledshop [Электронный ресурс] – Режим доступа: http://ledshop.vn.ua...,свободный.
- Arduino MEGA2560 Pro mini // arduino-ua [Электронный ресурс]. – Режим доступа: http://arduino-ua.com..., свободный.
- Arduino Mega 2560 R3 // mini-tech [Электронный ресурс]. – Режим доступа: http://mini-tech.com.ua..., свободный.
- Bluetooth модуль HC-05 // robocraft [Электронный ресурс]. – Режим доступа: http://robocraft.ru..., свободный.