
Abstract
Content
- Introduction
- 1. Theme urgency
- 2. Physical model of a planetary hydraulic motor
- 3. Comparative analysis of hydromechanical characteristics of planetary hydraulic motors
- Conclusion
- References
Introduction
Hydromotors are used in technology much less often than electric motors, but in a number of cases they have a significant advantage. They weigh a lot less, and smaller in size, the range of regulation of the motors is much higher. The startup time is much less (fractions of seconds). The hydromotor is not afraid of frequent on / off, stop and reverse.
However, hydraulic motors have a number of drawbacks, such as: leakage of working fluid, lower efficiency, heating of liquid during operation, etc.
Planetary are called reversible hydromotors of volumetric type of action with an end distribution of working fluid. Often, a planetary motor has a larger working volume than gears or axial–piston ones. Due to this, high torque is achieved. The design with the internal gerotor pair ensures smooth running and the possibility of rotation at low speeds, while for axial piston motors the lower speed limit is 300 rpm. Here, such a speed for many engines is maximum, and the minimum is about 5 rpm. For these reasons, a planetary motor is called high–torque and low-speed.
1. Theme urgency
Despite the fact that electric motors are used more often, there are situations when their use is limited or impossible.
The electric motor itself can not rotate at a low frequency. To achieve low frequencies, he needs a reducer, which, in certain cases, takes up a lot of space. This greatly affects the overall and weighting of the drive systems. In turn, the hydraulic motor does not require intermediate links to create a high torque. In addition, hydromotors have significantly smaller dimensions than electric motors that create a similar torque.
2. Physical model of a planetary hydraulic motor
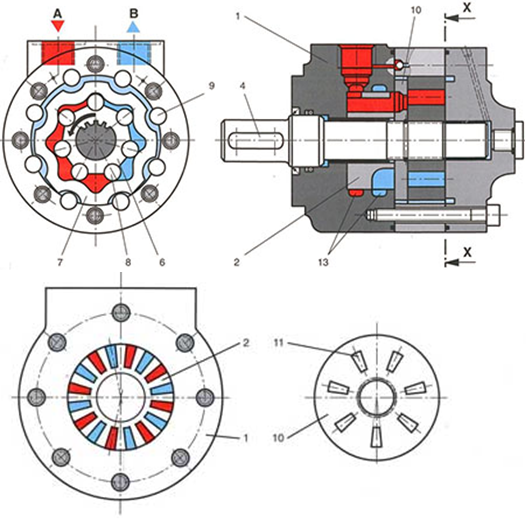
Pic. 1. Planetary hydromotor (assembly, primary source [18])
Hydraulic motors with planetary gears have a large working volume with limited overall dimensions. This is achieved due to the fact that for each rotate of the drive shaft there are a large number of displacement cycles.
To the hydraulic motor, the working fluid is fed through line A and discharged through line B. In the distributor (2) pressed into the body (1), two annular channels (13) for supply and discharge of liquid and 16 longitudinal grooves of the distributing plate (10) are provided, which is connected to the shaft (4) by a splined connection. Thus, the rotor (6) and the distributing plate (10) rotate at the same speed. The radially located slots (11) on the distributor plate connect the distributor (2) to the working chambers formed by the inner surface of the hollow wheel (7), the outer surface of the rotor, the inner rollers (8) and the side surfaces. The force in the working chambers creates a torque on the rotor. In this case, the hollow wheel (7) is supported by external rollers (9).
The operation of the hydraulic motor is as follows: the working fluid from the power source (pump) at the nominal pressure is supplied to the supply line A, and then through the distribution disk 10 enters the working chambers, the volume of which is limited by the profile of the rotary gear 6 making rotary motion and the hollow wheel 7, which performs plane–parallel motion, and also by the places of their contact. (Unlike the gerotor motor, where the rotor gear rotates with an eccentric axis displacement relative to the stator axis, bending around the inner surface of the stator wheel and thereby changing the working chamber volumes, in a planetary motor the rotor gear has a common axis with the stator ring, and the satellite wheel 7 in turn shifts to the eccentricity and changes the volume of the working chambers.) When the working fluid enters the working chambers, it exerts pressure on the walls of the rollers of the rotary gear 6, The direction of movement depends on the difference between the open spaces roller. Movement occurs in the direction of a larger area, because more force acts on it. The rotary gear, in turn, sets in motion a satellite wheel 7 (hydraulic arm), which changes the volume of the working chambers, displacing the liquid through the grooves 11 of the distributor plate 10 and further into the drain line B. Rotation of the rotary gear allows creating torque of the output link.
Pic. 2. Planetary gearing of high torque hydraulic motor
(animation: 7 frames, 10 cycles of repetition, 158 kilobytes)
3. Comparative analysis of hydromechanical characteristics of planetary hydraulic motors
To high torque it is customary to include hydraulic motors with a torque above 2000 N and a rotational speed of less than 100 rpm. The torque is directly proportional to the working volume of the hydraulic machine, therefore, the moment increases with the increase of the working chambers, the change in the eccentricity, the multi–row design and the modified design of the moving parts, depending on the type of hydraulic motor.
q – working volume; Δр – differential pressure on the suction and discharge lines of the hydraulic motor; ηhm – hydromechanical efficiency.
As high–torque hydromotors often use radial–piston, axial–piston and planetary (gerotor).
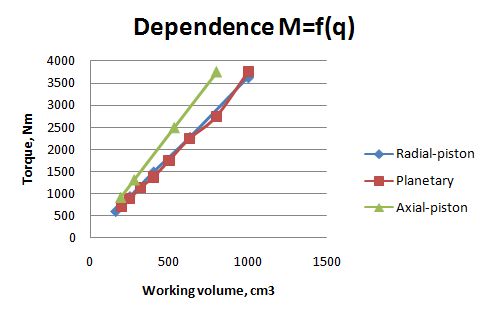
Рic. 2. The dependence of the torque on the working volume.
The graph of the dependence of the torque on the working volume shows that for equal working volumes the torques are practically the same.
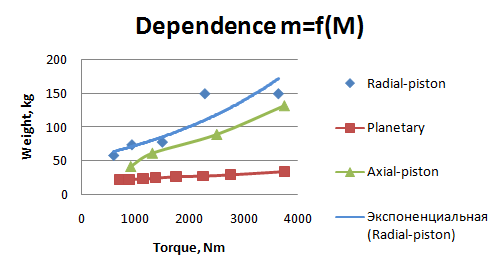
Рic. 3. Dependence of mass on torque.
The overall criterion of the hydraulic machine shows that with equal torque generated, the mass of the planetary motor is several times smaller – hence, it is more compact than its analogs.
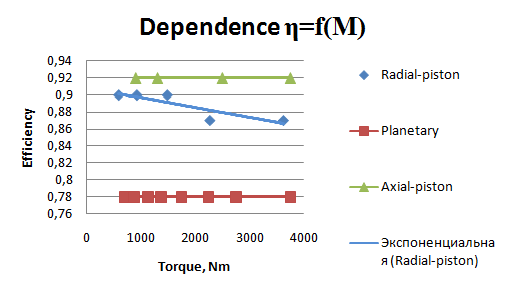
Рic. 4. Dependence of efficiency from torque.
A comparison of the efficiency of hydraulic machines leads to the conclusion that, despite the significant advantage in overall dimensions, the efficiency of a planetary motor is significantly lower than radial piston and an axial–piston one.
Conclusions
General provisions related to the topic are given, comparison and analysis of hydromechanical characteristics of high torque hydraulic motors of different types are performed. The comparison was performed in the range of working volumes up to 1000 cm3. It showed that a planetary–type hydraulic motor has advantages in overall dimensions, but its efficiency is significantly lower than its counterparts. Proceeding from this, it was concluded that it is necessary to analyze the mathematical model of the working process of the high torque hydraulic drill that provides an opportunity for further analysis to improve the efficiency of this type of hydraulic motors.
References
- Кононенко А.П. Об’ємні гідравлічні машини гідроприводів: навчальний посібник / А.П.Кононенко Донецьк: ДВНЗ
ДонНТУ
, 2011. – 292с. - Коваль П.В. Гидравлика и гидропривод горных машин: Учебник для вузов по специальности
Горные машины и комплексы
. – М.: Машиностроение, 1979. – 319с. - Ковалевский В.Ф., Железняков Н.Т. и др.
Справочник по гидроприводам горных машин
– М.:Недра
1967. – 403с. - Башта Т.М. Объемные насосы и гидравлические двигатели гидросистем: Учебник для вузов. – М.: Машиностроение, 1974. – 606с.
- Свешников В.К., Усов А.А. Станочные гидроприводы: Справочник. – М.: Машиностроение, 1988. – 512с.
- Гейер В.Г., Дулин В.С., Заря А.Н. Гидравлика и гидропривод: Учебник для вузов. – 3-е изд. перераб. и доп. – М.: Недра, 1991. – 331с.
- Аврунин Г.А., Грицай И.В., Кириченко И.Г. и др. Объемный гидропривод и гидропневмоавтоматика: Учебное пособие. – Харьков: ХНАДУ, 2008. – 412с.
- Гавриленко Б.А., Минин В.А., Рождественский С.Н. Гидравлический привод. – М.: Машиностроение, 1968. – 502с.
- Юдин Е.М. Шестеренные насосы. Основные параметры и их расчет. – М.: Машиностроение, 1964. – 236с.
- Рыбкин Э.А., Усов А.А. Шестернные насосы для металлорежущих станков. – М.: Машгиз, 1960. – 189с.
- ГОСТ 14060-68. Гидромоторы шестеренные. Ряды основных параметров. Действителен с 01.07.1969.
- Патент РФ № 2315197. Гидромотор планетарного типа. (F03C 2/08) от 20.01.2008. Константинов Р.И., Селезнев Е.П., Смирнов И.А., Позняк М.И., Фабрин Ю.Н., Федеральное государственное унитарное предприятие
Конструкторское бюро химического машиностроения им. А.М. Исаева
. - Патент РФ № 2287061. Гидромотор планетарного типа. (F01C 1/10) от 10.11.2006. Селезнев Е. П., Константинов Р.И., Будников А.П., Позняк М.И., Поляков В.И., Федеральное государственное унитарное предприятие
Конструкторское бюро химического машиностроения им. А.М. Исаева
. - Патент РФ № 2321768. Героторный винтовой гидравлический двигатель. (F03C 2/08) от 10.04.2008. Андоскин В.Н., Астафьев С.П., Пушкарев М.А., Нестеров А.В., Глинкин А.С., Общество с ограниченной ответственностью "Радиус-Сервис".
- Патент SU 1065631 A. Планетарный гидромтор. (F04C 2/08) от 07.01.1984. Ерасов Ф.Н., Запорожский конструкторско-технологический институт сельскохозяйственного машиностроения.
- Патент SU 329328. Героторный гидромотор. ( F03С 2/08) от 01.01.1972. Ерасов Ф.Н., Сторожук В.П., Кошеленко Г.П., Ковчак А.Н., Одесский политехнический институт, завод
Стройгидравлика
. - US Grant US 3439766 A. Hydraulic motor in wheel assembly. (B60K17/14) priority date: 1966-12-29. Donald S Dence, Barry L Frost; Clark Equipment Co.
- Информационно-инженерный портал // Вэб-Механика [Электронный ресурс] – Режим досутпа: web-mechanic.ru