
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Огляд досліджень і розробок
- 3. Фізична модель планетарного гідромотора
- 4. Порівняльний аналіз гідромеханічних характеристик планетарних гідромоторів
- Висновки
- Список джерел
Вступ
Гідромотори застосовуються в техніці значно рідше електромоторів, проте в ряді випадків мають істотні переваги перед останніми. Вони менше в середньому в 3 рази за розмірами і в 15 разів по масі, ніж електромотори відповідної потужності. Діапазон регулювання частоти обертання гідромотора істотно ширше: наприклад, він може становити від 2500 об / хв до 30-40 об / хв, а в деяких випадках, у гидромоторов спеціального виконання, доходить до 1–4 об / хв і менше. Час запуску і розгону гідромотора складає долі секунди, що для електромоторів великої потужності (декілька кіловат) недосяжно. Для гідромотора не становлять небезпеки часті включення–виключення, зупинки і реверс. Закон руху вала гідромотора може легко змінюватися шляхом використання засобів регулювання гідроприводу.
Однак гідромотори також володіють деякими недоліками:
- витоки робочої рідини через ущільнення і зазори, особливо при високих значеннях тиску в гідросистемі, що вимагає високої
точності виготовлення деталей гідроустаткування;
- нагрів робочої рідини при роботі, що призводить до зменшення в'язкості робочої рідини і збільшення витоків,
тому в ряді випадків необхідне застосування спеціальних охолоджувальних пристроїв і засобів теплового захисту;
- більш низький ККД ніж у порівнянних механічних передач;
- необхідність забезпечення в процесі експлуатації чистоти робочої рідини, оскільки наявність великої кількості
абразивних частинок в робочій рідини призводить до швидкого зносу деталей гідроустаткування, збільшення зазорів і витоків через них,
і, як наслідок, до зниження об'ємного ККД;
- необхідність захисту гідросистеми від проникнення в неї повітря, наявність якого призводить до нестабільної роботи гідроприводу,
великим гідравлічним втратам і нагрівання робочої рідини;
- пожежонебезпека в разі застосування горючих робочих рідин, що накладає обмеження, наприклад, на застосування гідроприводу
в гарячих цехах;
- залежність в'язкості робочої рідини, а значить і робочих параметрів гідроприводу, від температури навколишнього середовища;
- в порівнянні з пневмо– і електроприводом – неможливість ефективної передачі гідравлічної енергії на великі відстані
внаслідок великих втрат напору в гідролінії на одиницю довжини.
Планетарними називають реверсивні гідромотори об'ємного типу дії з торцевих розподілом робочої рідини. Найчастіше планетарний гідромотор має більший робочий об'єм ніж шестеренні або аксіально–поршневі. За рахунок цього досягаються високі крутний момент. Конструкція з героторного парою внутрішнього зачеплення забезпечує плавність ходу і можливість обертання на низьких швидкостях, тоді як для аксіально–поршневих гідромоторів нижньою межею швидкості є 300 об / хв. Тут же така швидкість для багатьох моторів максимальна, а мінімальна близько 5 об / хв. З цих причин планетарний мотор називають високомоментний і низькошвидкісним.
Конструкція планетарних гідромоторів: має 2 шестерні (героторного пару) з внутрішнім зачепленням (зовнішню нерухому і внутрішню рухливу, через яку відбувається передача моменту і частоти обертання). Розподільник гідравлічного мотора обертається синхронно з внутрішньої шестернею, що забезпечується карданним валом. Саме тому важливо правильно позиціонувати розподільник щодо героторного пари при складанні або ремонті гідромтора. У цьому випадку цикл всмоктування–нагнітання для кожної межзубовой порожнини відбувається практично без витоків. Використовуються два типи розподільників: барабанний розподільник виконаний спільно з вихідним валом; дисковий розподільник виконаний окремо від вихідного вала і приводиться в обертання через короткий кардан і має гідростатичне розвантаження для компенсації зусиль з боку робочої рідини.
1. Актуальність теми
Як зазначено вище, в даний час в системах приводів переважають електромотори, але в деяких випадках їх використання ускладнене або зовсім не можливо. Прикладом таких умов можуть служити приводи мобільних машин, що вимагають створення високого моменту на вихідній ланці або сильно обмежені умови шахт.
Електродвигун сам по собі не може обертатися з малою частотою. Для досягнення низьких частот йому необхідний редуктор, який займає, в певних випадках, досить багато місця. Це сильно позначається на габаритних і вагових показниках привідних систем. У свою чергу гідромотор не потребує додаткових механізмів для створення високого моменту. До того ж гідромотори мають значно менші габарити ніж електромотори, що створюють аналогічний обертальний момент.
2. Огляд досліджень і розробок
Перший прототип гідравлічного мотора з внутрішнім зачепленням розроблений американськими інженерами Donald S Dence і Barry L Frost [17] в 1966 році на базі гідромоторів іншого типу і фізики процесів планетарного зачеплення шестерень. Потім, на радянському просторі в 1972 з'являється аналог, розроблений на базі Одеського політехнічного інституту [16], що дає поштовх для подальших досліджень і розробок в цій галузі як в СРСР так і на пострадянському просторі [12-15]. Пізніше з'являється безліч наукових посібників, в яких описуються високомоментні гідромотори, в тому числі і планетарні [1-10]. Розроблено методику розрахунку шестеренних гідромашин [9]. Основні параметри для даного типу моторів стандартизовані [11], з останньою поправкою в 1986 році.
3. Фізична модель планетарного гідромотора
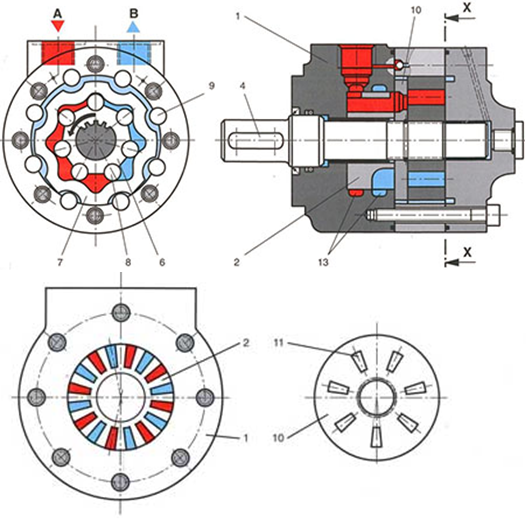
Рисунок 1 – Планетарний гідромотор (збірка, першоджерело [18])
Гідромотори з планетарними шестернями мають значний робочий об'єм при обмежених габаритних розмірах. Це досягається за рахунок того, що на кожен оборот приводного вала доводиться велика кількість тактів витіснення.
До гідромоторів робоча рідина підводиться через лінію А і відводиться через лінію В. У розподільнику (2), запресованому в корпус (1), передбачені два кільцевих канали (13) для підведення і відведення рідини і 16 поздовжніх жолобків розподільної шайби (10), яка з'єднана з валом (4) за допомогою шліцьового з'єднання. Таким чином, ротор (6) і розподільна шайба (10) обертаються з однаковою швидкістю. Радіально розташовані пази (11) на розподільній шайбі з'єднують розподільник (2) з робочими камерами, утворенними внутрішньою поверхнею полого колеса (7), зовнішньою поверхнею ротора, внутрішніми роликами (8) і бічними поверхнями. Зусилля в робочих камерах створює обертальний момент на роторі. При цьому порожнисте колесо (7) контактує із зовнішніми роликами (9).
Робота гідромотора відбувається наступним чином: робоча рідини з джерела живлення (насоса) при номінальному тиску подається в лінію підведення А, потім через розподільний диск 10 потрапляє в робочі камери, об'єм яких обмежений профілем роторної шестерні 6, яка здійснює обертальний рух, і полого колеса 7, яке здійснює плоскопараллельний рух, а також місцями їх контакту. (На відміну від героторного гідромотора, де роторна шестерня обертається з ексцентрісітетним зміщенням осі щодо осі статора, огинаючи внутрішню поверхню статорної колеса і, тим самим, змінюючи обсяги робочих камер, в планетарному гідромоторі роторна шестерня на всьому протязі роботи має загальну вісь зі статорних кільцем, а сателітне колесо 7 в свою чергу зміщується на ексцентриситет і змінює об'єми робочих камер.) При попаданні робочої рідини в робочі камери вона чинить тиск на стінки роликів роторної шестерні 6, причому напрямок руху залежить від різниці відкритих площ ролика. Рух відбувається в напрямі більшої площі, тому що на неї діє більше зусилля. Роторна шестерня, в свою чергу, приводить в рух сателітне колесо 7 (гідрообертач), яке змінює обсяги робочих камер, витісняючи рідину через пази 11 розподільної шайби 10 і далі в зливну лінію В. Обертання роторної шестерні дозволяє створити обертальний момент вихідної ланки.
Рисунок 2 – Планетарне зачеплення високомоментного гідромотора
(анімація: 7 кадрів, 10 циклів повторення, 158 кілобайт)
4. Порівняльний аналіз гідромеханічних характеристик планетарних гідромоторів
До високомоментних відносяться гідромотори з обертальним моментом M > 2000 Н•м,і частотою обертання вихідної ланки n < 100 об/мин. При виборі високомоментного гідромотора визначальним параметром є обертальний момент, який в свою чергу залежить від робочого об'єму.
де q – робочий об’ем; Δр – перепад тиску на всмоктуючії і нагнітальнії лініях гідромотора; ηгм – гідромеханічний ККД.
Обертальний момент прямопропорцієн робочому об'єму гідромашини, отже, момент підвищується зі збільшенням робочих камер, зміною величини ексцентриситету, багаторядним виконанням а також зміненим конструктивним виконанням рухомих частин в залежності від типу гідромотора.
У якості високомоментних гідромторов часто використовують радіально-поршневі, аксіально–поршневі і планетарні (героторні).
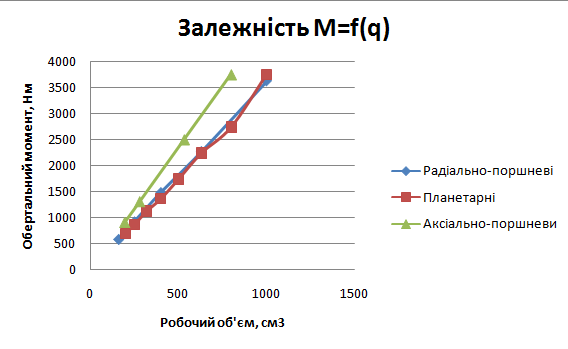
Рисунок 2 – Залежність обертального моменту від робочого об’єму.
Графічна залежність обертального моменту від робочого об'єму M=f(q) не встановлює суттєвих переваг будь-якого типу гідромоторів. (рис.9). При рівних робочих об'ємах створюються приблизно однаковий обертальний момент. Невелика перевага є у аксіально–поршневого гідромотора, який розвиває ту ж величину обертального моменту що і інші типи при меншому робочому об'ємі. Але мотор МЗХ – це гідромотор нового покоління, до того ж закордонний, отже, це зовсім інший рівень цін.
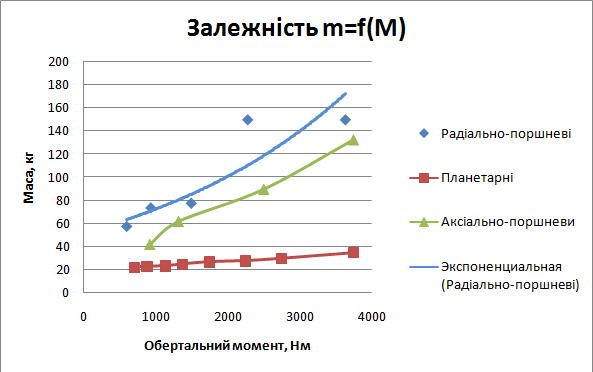
Рисунок 3 – Залежність маси від обертального моменту.
Габаритний критерій гідромашини – залежність маси від крутного моменту m = f (M) (рис.2) показує, що при рівних обертальних моментах, маса планетарного гідромотора в рази менше – отже, він компактніше ніж його аналоги. В умовах обмеженого простору (наприклад гірничодобувна промисловість) це вагомий аргумент на користь цього типу гідромотора.
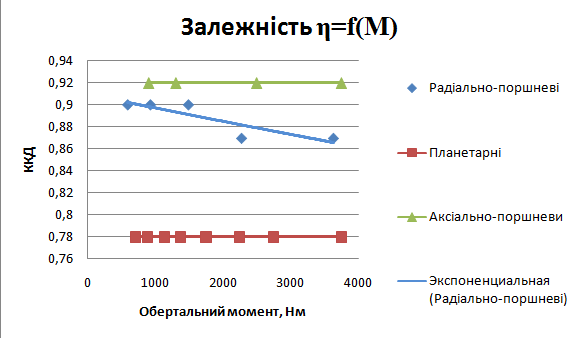
Рисунок 4 – Залежність ККД від обертального момента.
Порівняння коефіцієнтів корисної дії гідромашин η=f(M) (рис.3) призводить до висновку, що не дивлячись на значну перевагу в габаритних показниках, ККД планетарного гідромотора відчутно нижче, ніж у радіально–поршневого і аксіально–поршневого. Для підвищення ККД цього типу гідромотора необхідно виконати аналіз математичної моделі робочого процесу на предмет можливих шляхів підвищення енергетичної ефективності роботи планетарної гідромашини.
Висновки
Дано загальні положення, пов'язані з темою, виконано порівняння і аналіз гідромеханічних характеристик високомоментних гидромоторів різних типів. Порівняння виконувалось в діапазоні робочих об'ємів до 1000 см3. Воно показало, що гідромотор планетарного типу має переваги в габаритних показниках, але його ККД відчутно нижче аналогів. Виходячи з цього зроблено висновок, що необхідно проаналізувати математичну модель робочого процесу високомоментного гідрообертача яка надає можливість для подальшого аналізу, з метою підвищення ефективності роботи гидромоторов цього типу.
Список джерел
- Кононенко А.П. Об’ємні гідравлічні машини гідроприводів: навчальний посібник / А.П.Кононенко Донецьк: ДВНЗ «ДонНТУ», 2011. – 292с.
- Коваль П.В. Гидравлика и гидропривод горных машин: Учебник для вузов по специальности «Горные машины и комплексы». – М.: Машиностроение, 1979. – 319с.
- Ковалевский В.Ф., Железняков Н.Т. и др. «Справочник по гидроприводам горных машин» – М.: «Недра» 1967. – 403с.
- Башта Т.М. Объемные насосы и гидравлические двигатели гидросистем: Учебник для вузов. – М.: Машиностроение, 1974. – 606с.
- Свешников В.К., Усов А.А. Станочные гидроприводы: Справочник. – М.: Машиностроение, 1988. – 512с.
- Гейер В.Г., Дулин В.С., Заря А.Н. Гидравлика и гидропривод: Учебник для вузов. – 3-е изд. перераб. и доп. – М.: Недра, 1991. – 331с.
- Аврунин Г.А., Грицай И.В., Кириченко И.Г. и др. Объемный гидропривод и гидропневмоавтоматика: Учебное пособие. – Харьков: ХНАДУ, 2008. – 412с.
- Гавриленко Б.А., Минин В.А., Рождественский С.Н. Гидравлический привод. – М.: Машиностроение, 1968. – 502с.
- Юдин Е.М. Шестеренные насосы. Основные параметры и их расчет. – М.: Машиностроение, 1964. – 236с.
- Рыбкин Э.А., Усов А.А. Шестернные насосы для металлорежущих станков. – М.: Машгиз, 1960. – 189с.
- ГОСТ 14060-68. Гидромоторы шестеренные. Ряды основных параметров. Действителен с 01.07.1969.
- Патент РФ № 2315197. Гидромотор планетарного типа. (F03C 2/08) от 20.01.2008. Константинов Р.И., Селезнев Е.П., Смирнов И.А., Позняк М.И., Фабрин Ю.Н., Федеральное государственное унитарное предприятие «Конструкторское бюро химического машиностроения им. А.М. Исаева».
- Патент РФ № 2287061. Гидромотор планетарного типа. (F01C 1/10) от 10.11.2006. Селезнев Е.П., Константинов Р.И., Будников А.П., Позняк М.И., Поляков В.И., Федеральное государственное унитарное предприятие «Конструкторское бюро химического машиностроения им. А.М. Исаева».
- Патент РФ № 2321768. Героторный винтовой гидравлический двигатель. (F03C 2/08) от 10.04.2008. Андоскин В.Н., Астафьев С.П., Пушкарев М.А., Нестеров А.В., Глинкин А.С., Общество с ограниченной ответственностью "Радиус-Сервис".
- Патент SU 1065631 A. Планетарный гидромтор. (F04C 2/08) от 07.01.1984. Ерасов Ф.Н., Запорожский конструкторско-технологический институт сельскохозяйственного машиностроения.
- Патент SU 329328. Героторный гидромотор. ( F03С 2/08) от 01.01.1972. Ерасов Ф.Н., Сторожук В.П., Кошеленко Г.П., Ковчак А.Н., Одесский политехнический институт, завод «Стройгидравлика».
- US Grant US 3439766 A. Hydraulic motor in wheel assembly. (B60K17/14) priority date: 1966-12-29. Donald S Dence, Barry L Frost; Clark Equipment Co.
- Информационно-инженерный портал // Вэб-Механика [Электронный ресурс] – Режим доступа: Web-mechanic.ru