
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження
- 3. Огляд досліджень та розробок
- 4. Розробка алгоритму діагностування гідроприводу холодильника
МБЛЗ
- 4.1. Розрахунок математичних параметрів
- 4.2. Розробка математичної моделі кінематичних параметрів
- 4.3. Розробка фізичної моделі та перевірка адекватності математичної моделі
- Висновки
- Перелік посилань
Вступ
Однією із заключних стадій безперервного лиття злитків є їх охолодження. Дана операція виконується спеціальною машиною, званої холодильник. Холодильник реалізує поступове переміщення і кантовку (переворот) квадратних і круглих заготовок з використанням крокуючих балок. Привід холодильника зазвичай гідравлічний. В процесі експлуатації в машині починають відбуватися відмови, пов'язані з нерівномірністю спрацьовування гідроциліндрів, витоками рідини, деформацією конструкцій. Дана робота буде присвячена розробці алгоритму діагностування технічного стану гідравлічного приводу холодильника МБЛЗ. Рішення поставленого завдання буде досягнуто послідовно шляхом: вивчення технологій виробництва, аналізу конструкції, аналізу умов роботи машини, вивчення характерних відмов, проведення розрахунків і визначення найбільш навантажених вузлів, моделювання розвитку пошкоджень елементів гідроприводу, а також розробкою карти оглядів, карти змащення, формуванням переліку діагностичних параметрів і розробкою послідовності розпізнавання несправностей.
1. Актуальність теми
Конструкція холодильника (малюнок 1) складається з нерухомих 1 і рухливих 2 балок, вони з'єднані між собою фаркопом 3; гідроциліндрів вертикального переміщення 4 і гідроциліндрів горизонтального переміщення 5; заготовок 6.
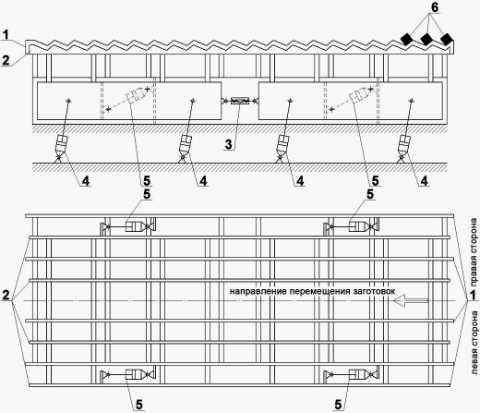
Малюнок 1. Схема холодильника МБЛЗ
Цикл руху холодильника включає 4 етапи пересування заготовок:
-підйом (виконується за допомогою горизонтальних гідроциліндрів);
-переміщення рухомих балок (за допомогою вертикальних гідроциліндрів);
-опускання рухомих балок;
-повернення в початкове положення (холостий хід).
Малюнок 1.1. Схему руху балок для переміщення холодильнику МБЛЗ
(анимация: 10 кадров, 11 повторов, 142 килобайта)
Досвід експлуатації холодильників даної конструкції показав, що після 5 років роботи відзначається зростання поступових і раптових відмов, як елементів гідроприводу, так і опорних конструкцій.
Основними вимогами до гідроприводу холодильника МБЛЗ є синхронність і стабільність роботи гідроциліндрів, тому аналіз безвідмовності приводу буде актуально.
На підставі даних агрегатних журналів за 6-річний період було проведено аналіз відмов машини.
На малюнку 2 представлена діаграма зміни сумарного річного кількості відмов холодильника в цілому за період спостереження з розподілом за порами року.
Тут можна виділити три інтервалу, що відрізняються кількістю відмов. за перший рік - мінімальна кількість відмов. Далі протягом трьох років спостерігалося постійне річна кількість відмов. За останні два роки відзначено різке збільшення кількості відмов. Така тенденція підтверджує відому закономірність зміни інтенсивності відмов машини як складної системи, що представляється S-подібної кривої і відображає природні процеси «старіння» технічних об'єктів.
Найбільша кількість відмов (29,7%) пов'язано з гідростанцією і фільтрами (28%). Відмови гідростанції стали виникати після двох перших років експлуатації з різким збільшенням їх кількості, а несправності фільтрів мали місце на весь період спостереження, але значне зростання їх інтенсивності стався на 5 і 6 рік. Така ж тенденція характерна для трубопроводів і гідроакумуляторів (частка їх відмов 15,3 і 11,9%). відмови гідроциліндрів горизонтального переміщення відбувалися щорічно, і їх частка склала 7,6%, а відмови гідроциліндрів вертикального переміщення (5,1%) стали виникати протягом останніх двох років. В цей же період відзначені відмови різьбових з'єднань кріплення гідроциліндрів (2,5%). В загальному, значне збільшення кількості відмов у гідроприводі сталося на 5 і 6 роки експлуатації, як і для холодильника МБЛЗ в цілому.
Основними видами відмов елементів гідроприводу є: тріщини трубопроводів, обриви рукавів високого тиску, дефекти штуцерів, ослаблення затяжки фланцевих з'єднань, знос і дефекти ущільнень, пошкодження мембран акумуляторів.
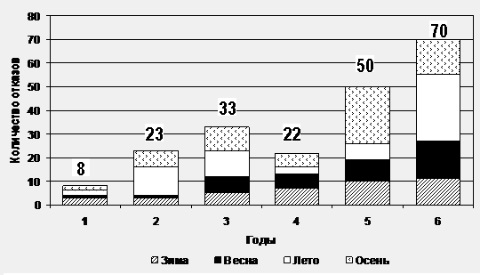
Малюнок 2 - Зміна кількості відмов холодильника МБЛЗ
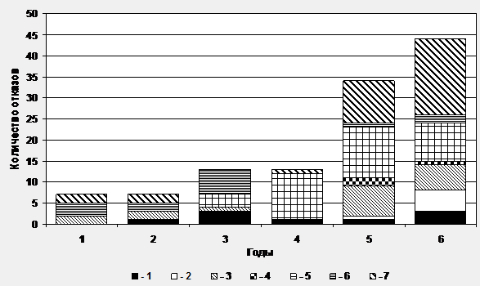
Малюнок 3 - Зміна кількості відмов гідроприводу за елементами: 1 - циліндр горизонтального переміщення; 2 - циліндр вертикального переміщення; 3 - трубопроводи; 4 - нарізні сполучення; 5 - гідростанція; 6 - акумулятор; 7 - фільтр.
Для детального вивчення причинно-наслідкових зв'язків відмов, вироблення рекомендацій по вдосконаленню конструкції холодильника і розробки алгоритму діагностування його технічного стану планується розробка імітаційної моделі машини, що дозволяє відтворювати рух машини, визначати її кінематичні і силові параметри, відстежувати їх зміна при виникненні різних несправностей гідроприводу [4].
2. Мета і задачі дослідження
Метою моєї роботи є розробка алгоритму діагностування гідроприводу МБЛЗ
. Для цього були поставлені завдання:
Основні задачі дослідження:
- проаналізувати конструкції подібних машин;
- виконати аналіз видів і причин несправностей гідроприводу;
- розробити математичну модель кінематичних параметрів холодильника і розрахувати «еталонну» траєкторію руху;
- розрахувати сили, що діють на елементи конструкції і гідроприводу;
- побудувати фізичну модель холодильника для перевірки адекватності математичних залежностей і дозволяє імітувати можливі несправності;
- розробити послідовність операцій для розпізнавання технічного стану гідроприводу. холодильника.
3. Огляд досліджень та розробок
Тема: Крокуючі балки
досить поширена, їй присвячено достатню кількість робіт, а також патентів. За допомогою патентного пошуку було знайдено два патенти про конструкції холодильників.
Винахід відноситься до прокатного виробництва, зокрема до конструкції рейкових холодильників сортових станів. Холодильник для прокату містить паралельно розміщені попарно чергуються стаціонарні і рухливі перекладають зубчасті рейки, що вирівнює рольганг і упор, розташований перед рольгангом. Вирівнюючий рольганг має многоручьевим ролики з приводом їх обертання. Ролики нерухомо встановлені між зубчастими рейками. Холодильник забезпечений несучими балками, встановленими під зубчастими рейками поперек їх розташуванню. На несучих балках розміщені підшипникові опори роликів рольганга. Ролики рольганга об'єднано між собою і з приводом їх обертання в групи за допомогою гнучкої пружною кінематичного зв'язку і механізму натягу ланцюга з амортизатором. Кінематичний зв'язок виконана у вигляді пластинчастої ланцюга, зірочок, насаджених на приводні хвостовики роликів і приводу їх обертання, і відхиляють зірочок. Привід обертання роликів рольганга розташований під несучої балкою. Відхиляють зірочки розміщені на несучих балках в проміжках між роликами рольганга. Винахід дозволяє підвищити ефективність роботи холодильника і виключити деформацію прокату [6].
Винахід відноситься до пристроїв транспортування виробів, заготівок, контейнерів, піддонів в печах. Метою винаходу є підвищення економічних показників печі. Пристрій для транспортування виробів містить нерухому подину, крокуючі балки з опорними стійками і несучої частиною. Шагалбалки з'єднані з механізмом вертикального і горизонтального переміщення. На подине розміщені вироби. У кладці корпусу печі і в подине зроблені поздовжні канали для переміщення штовхають стійок, укріплених на крокуючих балках. Відстань між опорними стійками дорівнює кроку поздовжнього переміщення h, а між опорними стійками і штовхальних стійками відстань дорівнює (H + 0,5 B), де B - ширина несучої частини опорної стійки. Пристрій дозволяють спростити конструкцію печі, зробивши односторонню завантаження і вивантаження виробів, поліпшити герметизацію робочого простору за рахунок глухий закладки другого торця печі, скоротити в два рази лінії транспортування виробів до печі і від неї і зменшити кількість обслуговуючого персоналу. Крім того, винахід дозволяє виключити додаткове відведення з печі продуктів згоряння і, залишивши одну зону прямої рекуперації тепла, поліпшити ефективність використання тепла продуктів згоряння і підвищити ступінь прямий рекуперації [7].
Також була знайдена стаття на тему «Особливості формування динамічних
моделей багатодвигунових гідроприводів холодильниківМБЛЗ
.
У ній був приведений динамічний розрахунок холодильника МБЛЗ
з крокуючими балками [8].
4. Розробка алгоритму діагностування гідроприводу холодильникаМБЛЗ
4.1. Розробка алгоритму діагностування гідроприводу холодильника МБЛЗ
Будь-яке завдання діагнозу вирішується за допомогою реалізації відповідної процедури, в основі якої лежить алгоритм діагностування, який являє собою сукупність приписів у вигляді послідовності перевірок і правил обробки їх результатів. Розрізняють алгоритми перевірки справності, працездатності і пошуку несправності. Існує три види алгоритмів: безумовний з безумовною зупинкою, безумовний з умовною зупинкою і умовний з умовною зупинкою (мал. 4).
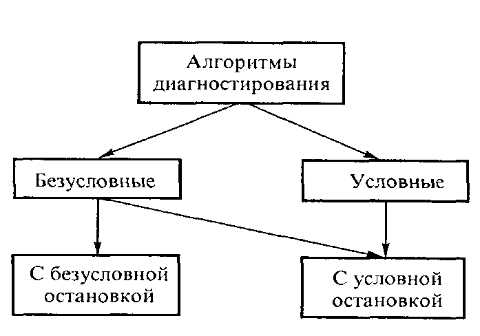
Малюнок 4 - Класифікація алгоритмів діагностування.
Безумовний алгоритм задає одну фіксовану послідовність проведення перевірок, при цьому інформація про технічний стан об'єкта фіксується і обробляється послідовно незалежно від результатів попередніх перевірок.
У умовному алгоритмі передбачається призначення кожної наступної перевірки в залежності від результату аналізу попередніх перевірок.
Якщо висновок про технічний стан об'єкта може бути зроблено тільки після проведення всіх перевірок, передбачених алгоритмом, то такий алгоритм називають алгоритмом з безумовною зупинкою. Якщо видача результату діагностування можлива після виконання кожного або деяких проміжних кроків алгоритму, то останній називають алгоритмом з умовною зупинкою.
Найбільш поширеними формами подання алгоритмів діагностування є таблиці і деревовидні графи. безумовні алгоритми з безумовною зупинкою представляються у вигляді таблиць, в якості яких, наприклад, виступають словники несправностей. Безумовний алгоритм з умовної зупинкою представляється у вигляді графа (мал. 5а). коренева вершина графа представляє безліч. S={S1,S2,...,S7} всіх розглянутих технічних станів об'єкта, а інші вершини:
- підмножини станів, що виділяються в результаті поділу безлічі S і його підмножин за результатами елементарних перевірок. висячі вершини відповідають підмножини еквівалентних станів. Що виходять із вершин дугами зображуються елементарні перевірки, а заходять дугами
- результати цих перевірок.
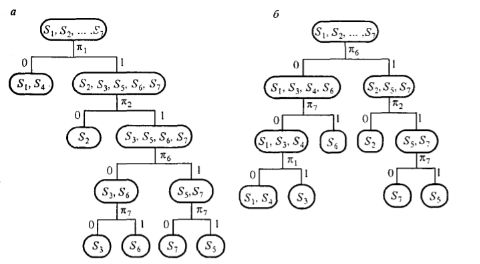
Малюнок 5 - Схеми безумовного (а) і умовного (б) алгоритмів діагностування.
4.2 Разработка физической модели и проверка адекватности математической модели
При разработке математической модели в конструкции холодильника была выделена структурная группа, представляющая собой рычажный механизм, расчетная схема которого приведена на рисунке 2. Звенья АВ и FE соответствуют гидроцилиндрам вертикального перемещения, а звено CD – гидроцилиндру горизонтального перемещения. Точки В, С и Е располагаются на подвижной балке и перемещаются плоскопараллельно. Длины звеньев СВ, СЕ и ВЕ постоянны. Четырехзвенник АВЕF образует паралелограмную систему. Положение каждого звена механизма в произвольный момент времени характеризуется углом φi. При подъеме и опускании подвижной балки звенья АВ и ЕF имеют переменную длину, которая зависит от хода гидроцилиндров, при этом звено CD имеет фиксированную длину и может поворачиваться вокруг точки D. При выдвижении и втягивании штока гидроцилиндра горизонтального перемещения изменяется длина звена CD, а звенья АВ и ЕF имеют постоянную длину и совершают качательное движение вокруг точек А и F соответственно. В исправном механизме lAB=lFЕ.
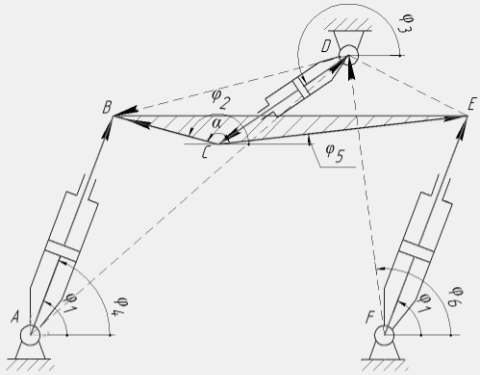
Малюнок 5 – Розрахункова схема важільного механізму
Представленний на мал. 6 механізм був зведений до узагальнюючої розрахунковій схемі (мал. 6).
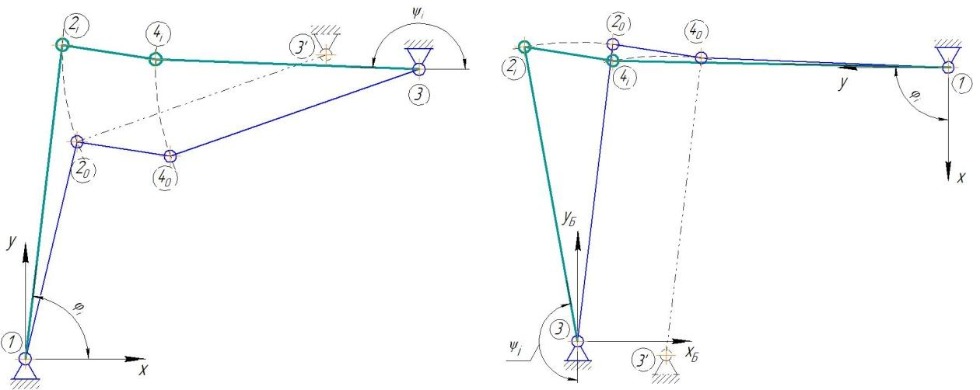
Малюнок 6 - Узагальнююча розрахункова схема четирехзвенниє механізму для етапів руху холодильника підйом-опускання (а) і переміщення-повернення в початкове положення (б)(б)
При складанні математичного опису узагальнюючого механізму як вихідних даних прийняті:
1) координати точок 1 і 3 – (x1;y1), (x3;y3);
2) координати точок 2 і 4 в початковому положенні  ,
, 
3) більшення довжини ланки 1-2, що відповідає максимальному ходу гідроциліндра вертикального переміщення (sв.max) або горизонтального переміщення (sг.max) – Δl12.
Положення точки 4 відносно точки 2 в процесі руху зберігається і може бути описано відстанями:

Точка 3’ – уявний центр повороту точки 2 - задається координатами:

 відстані по осях x і y між точкою 3 та точкою 4 в початковому положенні:
відстані по осях x і y між точкою 3 та точкою 4 в початковому положенні:

Відстані між точками 1, 2, 3, 3 'і 4 в початковому положенні механізму знаходяться, виходячи з координат точок.
Довжина ланки 1-2 є змінною і змінюється в діапазоні  Поточне положення ланки 1-2 з довжиною
Поточне положення ланки 1-2 з довжиною  характеризується кутом φi.
характеризується кутом φi.
Для визначення кута φi розглядався рух точки 2,
яка переміщається по дузі кола з уявним центром в точці 3’
з координатами  і радіусом
і радіусом  що описується рівнянням:
що описується рівнянням:

где  – поточні координати точки 2.
– поточні координати точки 2.
Одночасно точка 2 належить ланці 1-2, тому її координати можна знайти за виразами:
Після підстановки и замены  , а так же вводячи змінні
, а так же вводячи змінні

отримуємо вираз

Виконавши поділ доданків і зведення в квадрат, вираз зводиться до квадратного рівняння: a2z2+a1z+a0=0,
де a0, a1, a2 – коефіцієнти, значення яких обчислюються за формулами
z – змінна, z=cosφi.
Поточне значення кута φi відповідає корені рівняння і знаходиться за висловом:
де D – дискриминант уравнения,D=a12-4a2 a0 .
По знайденому значенню кута φi за формулами розраховуються координати точки 2  а потім координати точки 4:
а потім координати точки 4:

Угол ψi, характеризує стан ланки 3-4, обчислюється за виразами:
де U34i – кут рівний
Наведені залежності складають основу вдосконаленої
математичної моделі для визначення кутів положення ланок і траєкторій
руху шарнірів важеля механізму, виділеного в структурі холодильника
МБЛЗ
(малюнок 3). Розрахунок за формулами виконуються для кожного етапу
руху холодильника, при цьому враховується розташування шарнірів А, В, С,
D і їх відповідність точкам 1, 2, 3 і 4 в узагальнюючому механізмі. вихідними
даними математичної моделі виступають: 1) координати точок А, D – (xA;yA),(xD;yD);
2) оординати точок В, C в початковому положенні – (xВ0;yВ0), (xC0;yC0);
3) максимальний хід гідроциліндра вертикального переміщення –sв.max;
4) максимальний хід гідроциліндра горизонтального переміщення –sг.max.
4.3. Розробка фізичної моделі та перевірка адекватності математичної моделі
Перевірка адекватності розробленої математичної моделі була виконана з допомогою фізичної моделі (малюнок 7), що імітує частину холодильника МБЛЗ, відповідну структурної групі. Модель включала рухливу і нерухому балки, два гідроциліндра вертикального переміщення і один гідроциліндр горизонтального переміщення. Траєкторія руху точок рухомої балки фіксувалася шляхом безпосередньої відтворення. Для цього на поверхні рухомий балки перпендикулярно її поздовжньої осі закріплювався маркер, а перед фізичною моделлю нерухомо встановлювався аркуш паперу. далі на фізичної моделі імітувався цикл руху холодильника. отримане на папері зображення з траєкторією руху сканувати і оцифровувати. На малюнку 8 наведено траєкторія руху шарніра В, отримана аналітично, і траєкторія, зафіксована на фізичній моделі. Максимальна абсолютна похибка склала 5 мм, відносна похибка при зіставленні з ходом гідроциліндрів - 11,1%, що є допустимим.

Малюнок 7 - Фізична модель частини холодильника МБЛЗ.
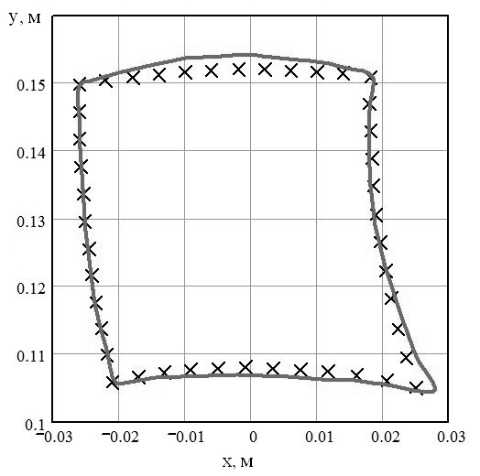
Малюнок 8 - Розрахункова (х) і зафіксована (___) на фізичної моделі траєкторія руху шарніра В.
Використовуючи розроблену математичну модель, для реальної конструкції холодильника
МБЛЗ
були розраховані «еталонні» траєкторії руху точок,
розташованих на рухомих балках, а саме, точок кріплення гідроциліндрів вертикального
і горизонтального переміщення (малюнок 9).
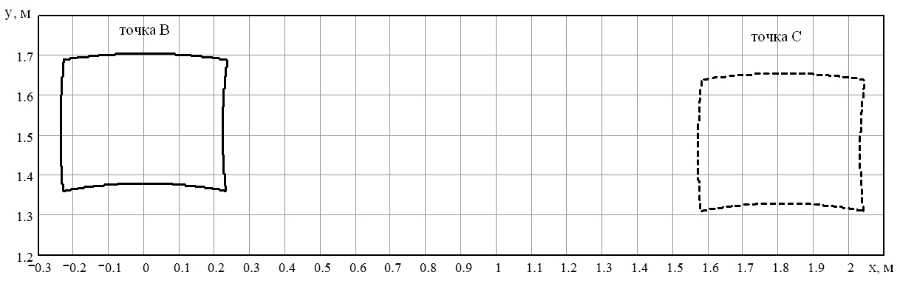
Малюнок 9 - Еталонні
траєкторії руху точок кріплення гідроциліндрів вертикального (точка В) і горизонтального (точка С) місцезнаходження мобільних балок холодильникаМБЛЗ
Надалі розроблена математична модель кінематичних параметрів холодильника з кроку балками і її
програмна реалізація в пакеті "MathCad" дозволять вивчити вплив несправностей гідроприводу (наявність витоків, несинхронність руху та ін.)
на силове навантаження елементів конструкції і розробити алгоритм діагностування та заходи щодо підвищення безвідмовності холодильника МБЛЗ
[1].
Висновки
Складання алгоритму діагностування гідроприводу холодильника МБЛЗ не завершено, він буде остаточно зроблений в квітні-травні 2018 року. Повний текст роботи та матеріали по її темі можуть бути отримані у автора або його керівника.
Список источников
- Шамрай Ю.А. Математическая модель кинематических параметров холодильника МБЛЗ с шагающими балками / Ю.А. Шамрай, Е.В. Ошовская, В.А. Сидоров // Инновационные перспективы Донбасса, г. Донецк, 24-25 мая 2017 г. – Донецк: ДонНТУ, 2017. Т. 3: 3. Инновационные технологии проектирования, изготовления и эксплуатации промышленных машин и агрегатов. – 2017. – С. 113 – 118.
- Бойко, Ю.П. Конструирование машин для металлургических процессов / Ю.П. Бойко, О.С. Ануфриенко, Н.Я. Подоляк. – Орск: ОГТИ (филиал ОГУ), 2007. – 261 с.
- Сидоров, В.А. Эксплуатация гидропривода металлургических машин / В.А. Сидоров, Е.В. Ошовская, С.А. Бедарев: Учеб. пособие. – Донецк: эл.ресурс, 2015. – 252 с.
- Шамрай. Ю.А. Анализ отказов гидропривода холодильника МБЛЗ / Ю.А. Шамрай, Е.В. Ошовская, В.А. Сидоров // Механика жидкости и газа: материалы XV Международной научно-технической студенческой конференции, 28-30 ноября 2016 г., Донецк - Донецк: ДонНТУ, 2016.? – С. 13–19.
- Попов, С.А. Курсовое проектирование по теории механизмов и механике машин / С.А. Попов, Г.А. Тимофеев. – Москва: Высш. шк., 1999. – 351 с.
- Липухин Ю.В., Данилов Л.И., Басов Г.А., Сорокин А.М. Холодильник для проката Патент РФ 2131315 1999г. Режим доступа: Ссылка
- Селезнев Н.П., Аксенов А.В.Способ транспортирования заготовок прямоугольного сечения Патент РФ 2016363 Режим доступа: Ссылка
- А.И. Савельев, С.В. Козлов, Д.О. Анисимов - Особенности формирования динамических моделей многодвигательных гидроприводов мнлз // СибГИУ УДК 621.01:669.02/09 c.28-31 Ссылка