
Реферат по теме выпускной работы
- Введение
- 1. Цель создания
- 2. Конструкция и принцип действия
- 2.1 Нитевая тяга
- 2.2 Протезы работающих на червячной передаче поступательного движения
- 2.3 Поршневого типа
- 3 Способы управления протезом
- 3.1 Электромиографический датчик
- 3.2 Датчик изгиба
- 4 Разработка электромеханической руки
- 5 Система управления и характеристики работы
- Выводы
- Список источников
Введение
У 15% людей на планете есть нарушения функций и структур организма, которые препятствуют физической активности и мешают социальной жизни, и больше 50 миллионов человек в год становятся инвалидами. Прямые и косвенные потери из–за этой проблемы составляют около 6% – в 2015 году это примерно 4,4 триллиона долларов. Это сравнимо с годовыми потерями мировой экономики от «великой рецессии» 2008 года. И это втрое больше годового ВВП России.
Качественные и функциональные протезы могли бы существенно уменьшить эти потери, но доступные протезы конечностей в большинстве своём, пишут «Известия» со ссылкой на исследование Высшей школы экономики, – это «примитивные малофункциональные изделия с плохим дизайном».
Благодаря современным материалам, сбалансированному размещению двигателей, датчикам силы прикосновения и вместительным аккумуляторам разработчики протезов смогли создать бионические руки, которые способны на большую часть повседневных действий. Одни модели приближены к реальной кисти – гибкий блок лучезапястного шарнира позволяет Michelangelo сгибаться в запястье, а другие – к роботам из научной фантастики, как BeBionic, которой из–за беспроводного управления смогли добавить функцию вращения на 360 градусов. Главным недостатком современных протезов пока остается цена.
1. Цель создания
На сегодняшний день существует большое количество различных разновидностей протезов верхних конечностей. Их основными изготовителями являются такие компании как Моторика
(Россия), Bebionic
(Великобритания), Ottobock
(Германия), Touch bionics
(Великобритания) и многие другие. На сайте компании Моторика
можно найти такое разделение протезов по назначению на две основные группы: косметические и функциональные. Главная функция косметического протеза – воссоздание внешнего вида человеческой руки. Функциональные же протезы позволяют обеспечивать хват и по принципу механизма управления делятся: рабочие, тяговые (активные, механические), миоэлектрические (биоэлектрические, бионические).
Очевидно, что стоимость косметических протезов ниже стоимости бионических протезов, но она стартует от 1000$. Стоимость бионических значительно больше.
На данный момент главными проблемами протезирования верхних конечностей человека являются высокая стоимость устройства и его сложность. Если первую проблему можно решить, изменяя баланс между качеством и надежностью материалов, то вторую проблему в данный момент не удастся решить легко. Это связано с необходимостью индивидуального подхода к каждому пациенту.
2. Конструкция и принцип действия
В данной работе предоставлен опыт разработки элементов электромеханической руки. Для создания устройства требуется выбрать механический принцип работы устройства, способ управления протезом, решить проблему с размерами, и воссоздать точность и быстродействие электромеханической руки схожей с человеческой.
В ходе исследования был осуществлен анализ нескольких типов механического исполнения биоэлектрических протезов. Их можно разделить на: использующих нитевую тягу, работающих на червячной передаче поступательного движения и схожие с ним поршневого типа, а также смешанного типа[8].
2.1 Нитевая тяга
Концепция построения электромеханической руки на движении пальцев при помощи нитевой тяги заключается в привязке к каждому пальцу упругой нити, которую должен тянуть на себя или же ослаблять электропривод, установленный в предплечье[3]. Такой механизм позволяет с высокой точностью и быстродействием отрабатывать сигнал задания, осуществлять широкий спектр движений пальцев и добиться гибкости электромеханической руки как у настоящей. Однако присутствуют и недостатки:

Рисунок 1.1 – Можель протеза на нитевой тяге
- Невозможно осуществить движение запястья. При его изгибе или повороте меняется длина нити и палец уже не может правильно согнуться;
- Если создавать максимально похожую на человеческую модель движение всех пальцев, то конструкция выйдет очень громоздкой и непрактичной для использования. Для этого ограничивают степень свободы протеза, чтобы сделать меньше габариты и вес;
- Сила сжатия очень ограничена мощностью управляющего электропривода. В таких моделях используют как обычно сервомоторы, их недостаток заключается больше не в том, что они маломощные, а в том, что они не могут обеспечить надёжную фиксацию объекта при хвате протеза.
2.2 Протезы работающих на червячной передаче поступательного движения
Движение пальцев протеза при помощи червячной передачи заранее ограничивают степень свободы протеза, из–за больших габаритов и невозможности поставить больше электроприводов, и позволяют осуществлять только основные движения, то есть хват и щепоть. Сила сжатия этой модели не очень велика, как и у модели с нитевой тягой, однако червячная передача позволяет схватить объект и надежно его зафиксировать. Червячная передача не позволит внешним факторам повлиять на изгиб пальцев, т.к. их надёжно держит винт. Эта причина является и минусом конструкции, т.к. при внештатной ситуации, когда необходимо срочно разжать протез, а это сделать не удается, остается только разрушить конструкцию. Что может быть не так уж и легко.
2.3 Поршневого типа
Протезы поршневого типа схожи по конструкции с протезами на червячной передаче. Они лишены недостатка в виде блокировки пальцев при аварийной ситуации, однако для их работы необходимо постоянно поддерживать питание поршня, а на это требуется много энергии в следствии чего увеличивается и объем батарей необходимых для продолжительной работы такой конструкции. Этого недостатка лишены протезы работающих на червячной передаче, т.к. они позволяют отключить питание электродвигателя при отработке движения, что экономит энергию[1].
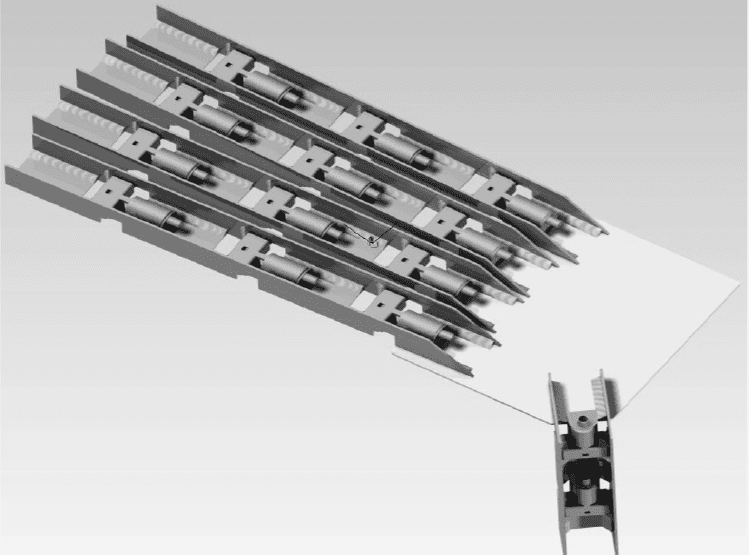
Рисунок 2.1 – Трёхменый вид модели
3 Способы управления протезом
После исследования темы управления протезами рук было найдено несколько основных систем задания сигнала на исполнительный механизм – это электромографический датчик (ЭМГ), датчик изгиба и отслеживание положение пальцев при помощи камер и посылать сигнал положения на управляемое устройство.
3.1 Электромиографический датчик
ЭМГ датчик представляет собой устройство, которое способно считывать сигнал с мышцы человека, обрабатывать его, масштабировать и подавать сигнал управления куда потребуется. Однако это очень сложное устройство с точки зрения настройки и управления. Необходимо точно установить датчики на места крепления, иначе сигнал будет неточный и очень слабый, что не позволит точно управлять положением пальцев[2].
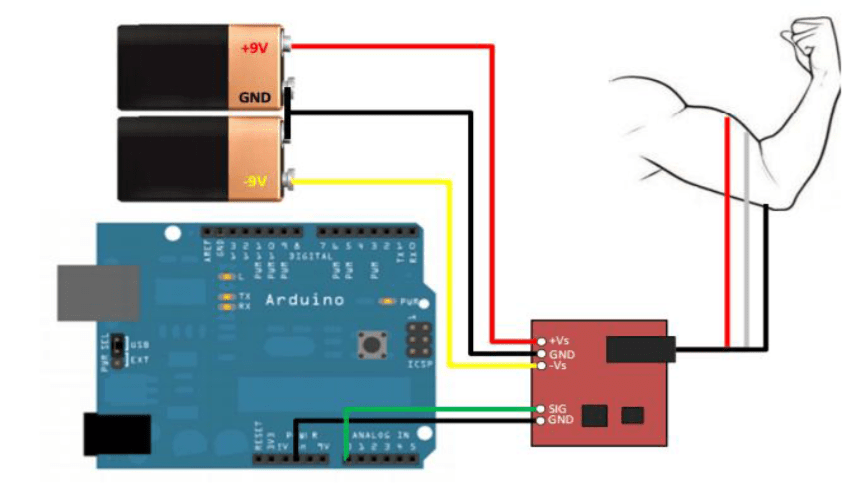
Рисунок 3.1 – Структура получения микроконтроллером сигналов с мышц
3.2 Датчик изгиба
Для управления рукой можно использовать датчики изгиба или тензорезисторы, прикрепленные к пальцам человека. При изгибе пальцев, информация с датчиков будет поступать на плату, а дальше на управляемый механизм. Эта технология может использоваться в удалённом управлении манипулятором.
Тензорезистор – резистор, сопротивление которого изменяется в зависимости от его деформации. Тензорезисторы используются в тензометрии. С помощью тензорезисторов можно измерять деформации механически связанных с ними элементов. Тензорезистор является основной составной частью тензодатчиков, применяющихся для косвенного измерения силы, давления, веса, механических напряжений, крутящих моментов. Тензорезистор является датчиком изгиба, у него высокая точность измерений и простота использования, однако по причине его высокой стоимости он используется в проекте. В качестве замены был создан датчик изгиба, работающий на лучевом эффекте. Поток света от сверхяркого светодиода проходит по силиконовой трубке и поступает на фоторезистор. Сопротивление фоторезистора при прямой трубке минимально, однако при изгибе трубки поток света падает, в следствии чего возрастает сопротивление на фоторезисторе. Это изменение и поступает на плату управления. Этот датчик изгиба и тензорезистор имеют разные принципы действия и устройство, однако выполняют одну и ту же функцию[4].

Рисунок 3.2 – Датчик изгиба на световом эффекте
4 Разработка электромеханической руки
Для проекта была выбрана биоэлектрическая модель руки работающих на червячной передаче поступательного движения с приводами на все пальцы т.к. эта модель является более функциональной, надёжной и способная делать различные хваты. Её характеристики подходят для проекта, а недостатки аннигилируются путём того что создается прототип, а не реальное устройство. Конструкция с поршневым типом не подошла по причине высокой стоимости поршней.
Рассмотрим его механическую конструкцию. На рисунке 4.1 представлена модель пальца и крепежа с электроприводом одной части кисти и собранная кисть из этих элементов. Она реализована с помощью 3Д. Материалом для создания послужил ABC пластик, он лёгкий и достаточно прочный для наших задач.
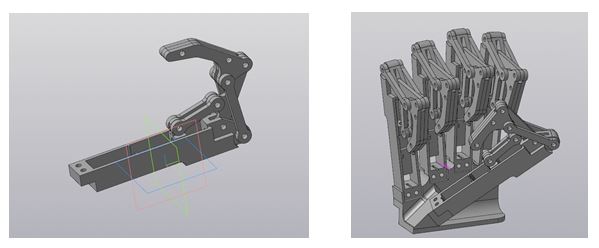
Рисунок 4.1 – 3D модель части биоэлектрического протеза
Рисунок 4.2 – 3D модель части биоэлектрического протеза
(анимация: 7 кадров, 5 циклов повторения, 273 килобайт)
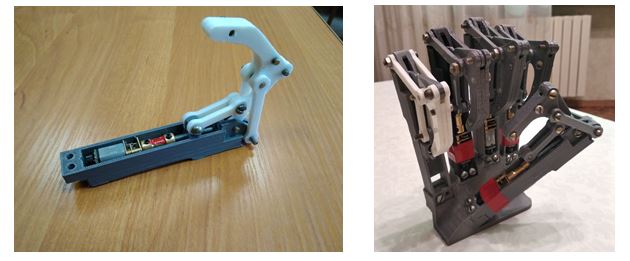
Рисунок 4.3 – Спроектированная и созданная часть протеза руки
Обеспечение сгибания и разгибания пальца реализовано с помощью мотор–редуктора со встроенным энкодером. Параметры двигателя следующие:
| Характеристики | Значение |
| Номинальное напряжение | 6 В |
| Номинальная скорость | 90 об/мин |
| Номинальный крутящий момент | 0.7 кг/см |
| Номинальный ток | 170 ма |
Эти параметры по предварительным расчетам должны были обеспечить достаточную силу сжатия, скорость сгибания около двух секунд и приемлемую точность управления устройством. Первая попытка оказалась неудачной: реализовать винтовую передачу с указанными характеристиками не удалось (шаг резьбы должен был составлять 11 мм). Далее был выбран вариант с обычной резьбой болта М5, у которого шаг резьбы составляет 0.8 мм. В этом случае скорость сгибания пальца составила 24 с. Поэтому мотор–редуктор был заменен на такой же типоразмер, но с меньшим передаточным числом и более высокой скоростью оборотов в минуту, теперь номинальная скорость двигателя составляет – 2200 об/мин и номинальное напряжение – 12 В, что позволило реализовать скорость сгибания пальца в 2 с, однако пришлось пожертвовать силой сжатия. Чертежи с основными типоразмерами представлены на рис. 4 и 5.
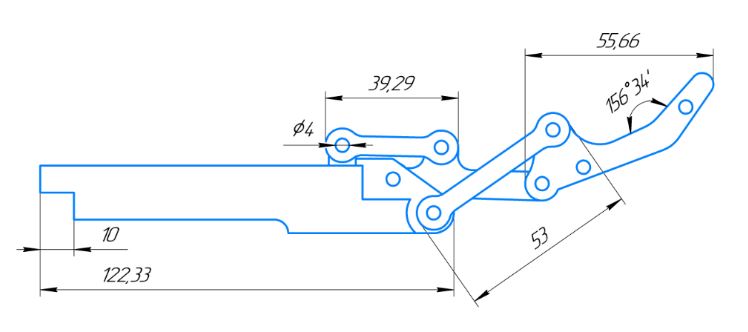
Рисунок 4.4 – Чертеж пальца (вид сбоку)
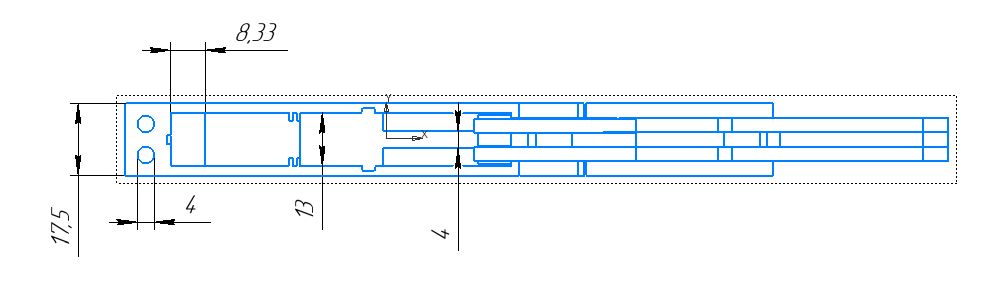
Рисунок 4.5 – Чертеж пальца (вид сверху)
Данная конструкция разработана для того, чтобы была возможность удерживать большие веса не с помощью электропривода, а благодаря своей конструкции. Червячная передача позволяет зафиксировать предмет и не дать ему выпасть, а выбранная конструкция дает возможность отключить приводной двигатель и зафиксировать предмет в одном положении. Это дает экономию энергии и увеличение длительности работы устройства в условиях автономной длительной эксплуатации. Можно увеличить этот показатель, заменив пластиковые делали на определенный сплав металлов для усиления конструкции и уменьшения люфтов между деталями конструкции.
5 Система управления и характеристики работы
Далее необходимо реализовать управление конструкцией.
Для этого была выбрана плата STM32F4Discovery. Выбор в пользу неё был сделан т.к. она обладает мощным процессором, большим количеством таймеров, и множеством контактов ввода вывода данных.
Реализация системы управления была сделана в программной среде MATLAB Simulink, и для работы с STM32F4Discovery была добавлена библиотека Wajiung. Такое решение было принято т.к. данная среда позволяет быстро создать рабочую программу из функциональных блоков, а также настроить их в кротчайшие сроки.
При помощи программной среды MatLab Simulink Wajiung разработана программа для управления приводом. Она позволяет контролировать положение вала двигателя, а значит и изгиб пальца.
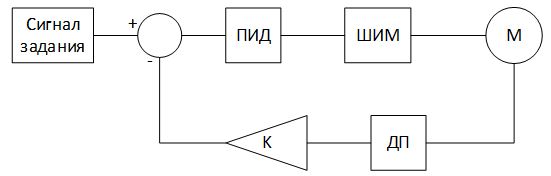
Рисунок 5.1 – Функциональная схема системы управления
Для создания схемы использовались такие блоки как: UART5_target, PWM_Digital, Volatile Data Storage Read, Encoder Read. На блок UART5_target приходит 4 сигнала управления: три коэффициента ПИД регулятора и сигнал задания, который измеряется в градусах. Далее сигнал поступает на ПИД регулятор, где регулируется перемещение. На выходе ПИД регулятора получается сигнал от 0 до 100, что соответствует 0 В и номиналу напряжения. После, блок PWM_Digital создает ШИМ управления, где для управления двигателем необходимо 2 сигнала задания, первый сигнал – ШИМ, который отвечает за «заполненность» сигнала, второй – за направление движения двигателя (вперед, назад). С помощью блока Volatile Data Storage Read идет считывание переменной из буфера task1, который является сигналом задания положения вала двигателя (в градусах). Encoder Read – это блок, с помощью которого считывается угол поворота двигателя, а также он является обратной связью по перемещению и измеряется в градусах.
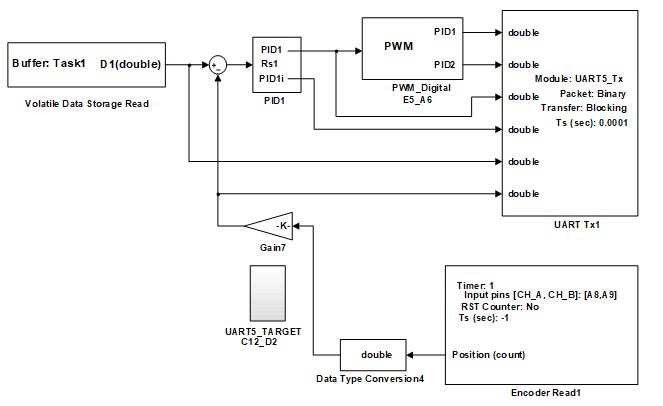
Рисунок 5.2 – Модель для управления электроприводом
Структура является очень простой, и она обеспечивает требуемые характеристики работы. Однако, как можно увидеть из рисунка 8, график показания энкодера имеет перерегулирование в размере 7%, что является плохим результатом и в дальнейшем регулятор будет настраиваться для обеспечения перерегулирования не более чем 1%. Эта погрешность не сильно видна из–за технических особенностей механизма. Были взяты болты общего пользования и гайки к ним, они плохо подогнаны и в соединении которых присутствует зазор, что дает большие люфты в конструкции и неточность движения.
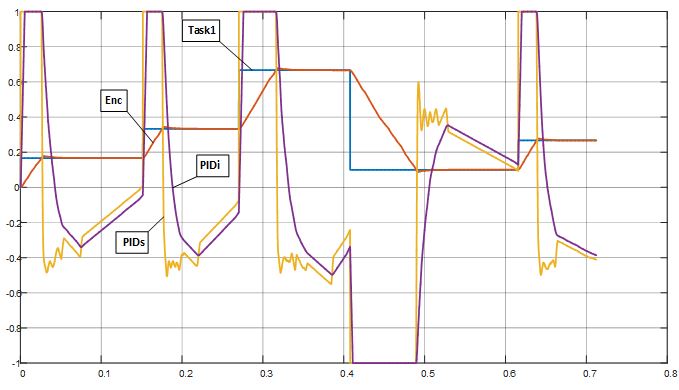
Рисунок 5.3 – Результаты работы модели
Управление положением осуществляется заданием точного значения угла поворота вала двигателя от 0 и до 10800 градусов. Сигнал с него преобразуется, масштабируется и в качестве угла поворота поступает в систему управления. На рисунке 8 изображена отработка положения при задании определённых углов поворота, где график Task1 обозначает задание угла, а Enc – его отработка двигателем. Видно, что положение отрабатывается практически без ошибки, а время отработки сигнала очень мало и равняется 0.03–0.08 с.
Как видно из рисунка 8, в начале задания сигнала Task1, двигатель не может мгновенно отработать сигнал. Для способствования скорейшей отработки ПИД регулятор усиливает коэффициент задания скачком до максимального значения. Это видно по отработке полной составляющей ПИД регулятора – PIDs, интегральная же составляющая повторяет кривую полного сигнала, но уже более сглажено. При приближении положения двигателя к заданию, ПИД регулятор уменьшает коэффициент. Его значение уходи в минус, а затем возрастают из–за того, что сигнал Enc немного переработал или недоработал задание и регулятор старается это исправить.
Выводы
- В ходе выполнения данной работы была разработана рука – робота имитирующая движения, которые выполняются оператором с сенсорной перчаткой.
- Данная рука используется как прототип для создания человекоподобных роботов, систем удаленного управления в труднодоступных местах и агрессивных средах, и протезов.
- В данной работе исследована тема создания электромеханических протезов, разработана и реализована часть устройства бионической руки. Исследуемая конструкция [10] была усовершенствована и воссоздана. Была написана программа для управления положением изгиба пальца. Проведены первичные испытания устройства и сделаны выводы на основе их.
Список источников
- О динамической модели кисти человека: Российский журнал биомеханики [2007], том 11, №1: 70-75.
- Электромеханическая система управления биоэлектрическим протезом верхних конечностей: Уфа, ФГБОУ ВО
Уфимский государственный авиационный технический университет
, ОООИПЦ-Энергия
. - Разработка и реализация макета бионического протеза кисти руки: ФГАОУ ВПО НИУ
БелГУ
, г. Белгород. - Использование датчика Flex [Электронный ресурс]: Проект сайта sparkfun.com, США. URL : https://learn.sparkfun.com/... (дата обращения: 20.11.2016).
- Гринь В.В., Басалыгин Е.В., Розкаряка П.И. Разработка аппаратной части Робо–руки на базе платы Arduino / Международная научно–практическая конференция
Инновационые перспективы донбасса
// Перспективы развития электротехнических, электромеханических и энергосберегающих систем, 2017. – 230–233с., [Электронный ресурс]. Режим доступа: http://ipd.donntu.ru - Определение сервопривода [Электронный ресурс] . Режим доступа: http://dic.academic.ru/...
- Рука и предплечье [Электронный ресурс]: Проект сайта inmoov.fr, США. URL : http://inmoov.fr/... (дата обращения 16.01.2017).
- Виды протезов рук [Электронный ресурс]. Режим доступа: : http://motorica.org/... (дата обращения 14.04.2018).
- Бионический протез руки [Электронный ресурс]. Режим доступа: : http://mech.spbstu.ru/... (дата обращения 14.04.2018).
- Разработка и анализ функционального протеза руки с нейрофизиологической системой управления [Электронный ресурс]. Режим доступа: : https://boomstarter.ru/... (дата обращения 14.04.2018).