
Referat
Inhaltsverzeichnis
- Einführung
- 1. Aktualität der Forschung
- 2. Ziel und Aufgaben der Forschung, geplante Ergebnisse
- 3. Übersicht der globalen Quellen
- 4. Die Ergebnisse der Modellierung
- Zusammenfassung
- Literaturverzeichnis
Einführung
Die Empfindlichkeit gegenüber der Parameteränderungen bleibt prinzipielle Beschränkung für die geberlosen Regelungssysteme. Um dieses Problem zu beseitigen, muss eine System entworfen werden, das die Parameter im Betrieb erfassen und die Regler an diese Änderungen anpassen kann.
Rotorwiderstandsänderungen beeinflussen die Drehzahlschätzung über den gesamten Drehzahlbereich in gleichem Maße. Der Einfluss der Ständerwiderstandsänderung vergrößert sich mit der sinkenden Drehzahl, was bei der Drehzahl Null zu unendlich großen Phasen- und Amplitudenfehlern führt. Deswegen ist die genaue Kenntnis des Ständerwiderstandes vorausgesetzt.
Die weitere Beschränkung bei der Verwendung dieser Methoden stellt die offene Integration dar, die für die Rotorflussberechnung unvermeidbar. Bei niedrigen Drehzahlen beeinträchtigt die Drift der offenen Integration und das Rauschen das Schätzergebnis. Trotzt aller Versuche, die offene Integration zu umgehen, kann das Modell im Drehzahlbereich um Null nicht eingesetzt werden.
1. Aktualität der Forschung
Für die meisten Betriebsmechanismen und -anlagen, die in dem Bergbau, der chemischen Industrie, der Hüttenindustrie und anderen Gebieten mit schweren Betriebsbedingungen eingesetzt werden, ist es von großer Bedeutung, den geregelten Elektroantrieb auf Basis der Asynchronmaschine zu schaffen, und zwar ohne zusätzliche Sensoren. Damit werden sie nicht nur preisgünstiger, aber auch zuverlässiger.
Für solche Antriebe ist das Konzept der feldorientierten Regelung ohne Drehzahlsensoren sehr perspektiv. Zur Zeit gibt es eine Vielzahl von Vorschlägen, die mit weniger oder mehr Aufwand versuchen, dieses Ziel zu erreichen. Dabei muss festgestellt werden, dass der Aufwand immer mehr steigt, je mehr der Bereich um den Drehzahlbereich Null stationär und dynamisch genutzt werden soll.
Das Hauptproblem dabei ist, dass immer die Unterschiede zwischen den Modellparametern und realen Maschinenparametern bestehen. Diese Schwankungen werden vor allem durch Erwärmung der Maschine verursacht. Bei der Asynchronmaschine mit der Isolationsklasse F und Kupferwicklung können sich der Ständer- und der Rotorwiderstand während des Betriebes um bis zu 50% ändern [6]. Deswegen wird als Rechenwert der mittlere Wert zwischen dem kalten und heißen Motorzuständen angenommen. Dabei beträgt die maximale Abweichung 20%.
2. Ziel und Aufgaben der Forschung, geplante Ergebnisse
Gegenstand der Entwicklung und Untersuchung dieser Arbeit ist das System der feldorientierten Regelung einer Asynchronmaschine mit Kurzschlussläufer ohne Drehzahlgeber.
Das Ziel der Arbeit ist die Untersuchung der Methoden zur Rotorfluss- und Drehzahlschätzung aufgrund der Informationen über leicht zugängliche Signale wie Ständerspannungen und –ströme im Regelbereich 1:100. Durch mathematische Modellierung den Einfluss der Parameteränderungen auf die Arbeit des Systems zu schätzen. Die Hauptschwierigkeiten und Einschränkungen bei der praktischen Realisierung dieser Methoden kennenzulernen.
Die Entwicklungen wurden auf Grund des Systems der feldorientierten Regelung einer Asynchronmaschine mit Kurzschlussläufer erarbeitet. Für die Untersuchung der entwickelten Regelungssysteme wurde die Methode der mathematischen Modellierung am PC durch Anwendung des Software-Pakets Matlab verwendet, das auf Modellierung der Automatisierungssysteme orientiert ist.
Übersicht der globalen Quellen
Bei der Arbeit an diesem Thema wurden verschiedene deutsche und englische Quellen studiert. Es wurden die Werke solcher Wissenschaftler wie Leonard, Blaschke und Vas analysiert. Dabei zeichnet sich das Buch vom Professor Dierk Schröder [1] besonders auf, in dem er ausführlich alle zur Zeit bekannte Methoden der geberlosen Antriebsregelung dargestellt hat. Es wurde auch auf die Probleme praktischer Realisierung und Perspektiven dieser Ansätze eingegangen. Deswegen wird Übersicht globaler Forschungen auf diesem Buch basieren.
Grundsatzlich werden aufgrund der oben diskutierten Einschrankungen bei der Drehzahl Null entweder Verfahren eingesetzt, die diese Einschrankung hinnehmen, oder es werden Zusatzinformationen genutzt. Aus der Literatur sind die folgenden Ansatze bekannt:
- Nichtadaptive Verfahren
- Adaptive Verfahren
- Neuronale Netze
- Nutzung von geometrischen Ruckwirkungen
- Einpragung von
hochfrequenten
Zusatz-Signalen
Nichtadaptive Verfahren
Diese Gruppe der Ansätze basiert auf der mathematischen Beschreibung der Asynchronmaschine und verwendet Modell, das die elektromagnetischen Prozesse in der Maschine wiederspiegelt. Für die Berechnung werden leicht zugängliche Parameter genutzt, wie Strom und Spannung. Das erste grundlegende Verfahren über die geberlose Drehzahlregelung wird von Mäder und Jötten [3] vorgestellt. Zur Zeit gibt es eine Vielzahl nichtadaptiver Methoden.
Adaptive Verfahren
MRAS (Model Referenz Adaptive System) (Abb. 1): Dieses Verfahren verwendet ein Referenzmodell
(RM), welches das gewunschte Verhalten als Referenz
vorgibt und ein sog. Adaptives Modell
(AM), welches sich an das Referenzmodell adaptiert. Die Differenz zwischen dem berechneten Wert des
Referenzmodells und dem Wert des adaptiven Modells liefert einen Fehlervektor, der zur Adaption der Parameter des adaptiven Modells verwendet wird.
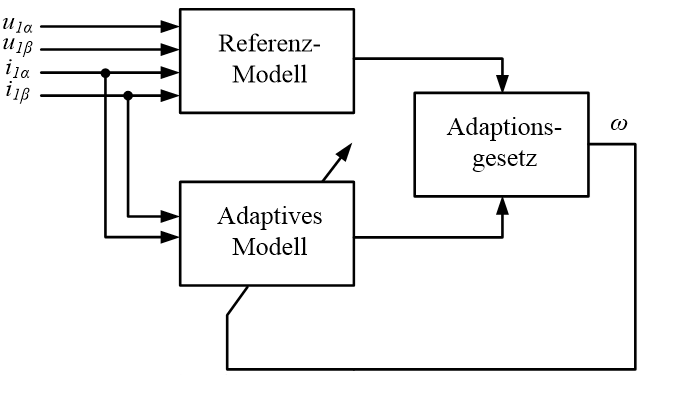
Abbildung 1 – Die Grundstruktur eines MRAS-Schätzers
Neuronale Netze
Neuronale Netze konnen in der einfachsten Ausfuhrung als Funktions- bzw. Oberflachenapproximatoren verwendet werden.Aufgrund der Fahigkeit derartiger Approximatoren, sich zu adaptieren, d.h. der Lernfahigkeit, wurde von verschiedenen Autoren vorgeschlagen, derartige lernfahige Systeme auch zur Drehzahl- bzw. Schlupfschatzung zu verwenden. In den meisten Veröffentlichungen werden zweischichtige neuronale Netze eingesetzt. Doch diese Systeme sind aufwändig und gewährleisten dabei nicht die gewünschte Genauigkeit.
Nutzung von geometrischen Ruckwirkungen
Asynchronmaschinen sind im allgemeinen magnetisch symmetrisch aufgebaut, so dass hier durch Zusatzmaßnahmen wie das gezielte geometrische Öffnen von Rotornuten eine magnetische Unsymmetrie hervorgerufen wird. Diese sekundären Effekte führen zu Zusatzsignalen, die eine andere Frequenz — im allgemeinen wird die dritte Harmonische ausgenutzt – als die Grundschwingung haben.
Die Auswertung der Oberschwingungen erfolgt vorzugsweise mit zwei Verfahren:
- FFT - Fast Fourier Transformation)
- PLL-Systeme - Phase Locked Loop
Einprägung von hochfrequenten
Zusatz-Signalen
Dieser Ansatz ist die Einprägung von hochfrequenten
Stator-Zusatzsignalen und die Auswertung der resultierenden hochfrequenten
Antwortsignale.
4. Die Ergebnisse der Modellierung
Im Laufe der Arbeit wurden verschiedene Methoden für die Drehzahlregelung eines elektrischen Antriebes ohne Drehzahl- und Rotorflusssensoren im Regelbereich1:100 untersucht.
Dabei wurde festgestellt, dass der Drehzahlbereich 1:100 fast für alle Modelle annehmbar ist, wenn die Motorparameter genau bekannt sind. Bei den geänderten Widerständen lässt sich befriedigend nur der Drehzahlbereich 1:10 gewinnen. Bei weiterer Vertiefung bis zum Drehzahlbereich 1:100 treten unzulässige Fehler auf, die die Regelung unmöglich machen (Abb. 2).
Abbildung 2 – Einfluss der Widerstandsänderung auf die Regelung
Solche Empfindlichkeit gegenüber Parametervariationen kann man damit erklären, dass allen Schätzverfahren ein Modell zugrunde liegt, das nur dann den Motorzustand richtig wiedergibt, wenn die Modellparameter mit den aktuellen Motorparametern übereinstimmen. Beliebige Abweichungen führen zu Fehlerhaften Zuständen im Beobachter.
Die Parameter sind aber nicht konstant, denn die Widerstände sind von der Temperatur und die Induktivitäten sind vom Strom abhängig. Deswegen müssen sie auch während des Betriebs nachgeführt werden.
Rotorwiderstandsänderungen beeinflussen die Drehzahlschätzung über den gesamten Drehzahlbereich in gleichem Maße. Der Einfluss der Ständerwiderstandsänderung vergrößert sich mit der sinkenden Drehzahl, was bei der Drehzahl Null zu unendlich großen Phasen- und Amplitudenfehlern führt. Dieses Problem betrifft aber nicht die Verfahren, die den Fluss auf Grund der Blindleisung berechnen.
Die weitere Beschränkung bei der Verwendung dieser Methoden stellt die offene Integration dar, die für die Rotorflussberechnung unvermeidbar. Bei niedrigen Drehzahlen beeinträchtigt die Drift der offenen Integration und das Rauschen das Schätzergebnis. Trotzt aller Versuche, die offene Integration zu umgehen, kann das Modell im Drehzahlbereich um Null nicht eingesetzt werden.
Für die Beseitigung dieser Einschränkungen wurden die von V. Kalashnikov angebotenen Methoden untersucht.
Untersuchung des adaptiven Verfahrens zur Ständerwiderstandschätzung [7] hat gute Ergebnisse im Bereich der möglichen Ständerwiderstandänderung gezeigt. Der geschätzte Wert kann weiter zur Korrektur der Regler eingesetzt werden, die diesen Wert beinhalten.
Untersuchung des Verfahrens zur Flussberechnung [8] zeigte, dass sich die Genauigkeit der Flussberechnung deutlich erhöht hat. Da dieses Verfahren zum Rauschen sehr robust ist, kann mit dessen Hilfe tieferer Drehzahlbereich erreicht werden.
Zusammenfassung
Die durchgeführten Untersuchungen ermöglichen das Regelungssystem aufzubauen, das stabile Arbeit gegenüber den Parameterschwankungen im Regelbereich 1:100 aufweisen kann.
Weitere Richtungen der Forschung:
- Die Verfahren zur Ständerwiderstandschätzung und Flussberechnung in das feldorientierte Regelungssystem ohne Drehzahlgeber integrieren,
- Unterschiedliche Betriebsarten zu testen, wie bei geänderten Widerständen und in verschiedenen Drehzahlbereichen,
- Die praktische Realisierung des neuen Regelungssystem mit der SPS zu untersuchen.
Literaturverzeichnis
- D. Schroder, Elektrische Antriebe – Regelung von Antriebssystemen, Berlin: Springer-Verlag, 2015.
- U. Riefenstahl, Elektrische Antriebstechnik, B. G. Teubner Stuttgart – Leipzig, 2000.
- Mader G. Regelung einer Asynchronmaschine unter alleiniger Verwendung an den Klemmen messbarer Groessen. Dissertation, TH Darmstadt, 1981.
- Vas P. Sensorless Vector and Direct Torque Control. – Oxford: Oxford University Press. – 1998.
- Kubota, H.; Matsuse, K. Speed sensorless field oriented control of induction motor with rotor resistance adaption. IEEE Industry Applications Society Annual Meeting 1993, Seattle, USA.
- Калашников В.И., Векторное управление асинхронным электроприводом, Донецк, ДонНТУ, 2009
- Способ исследования электрических машин переменного тока, АС 1514093, СССР кл. 0131/34, 1986, Калашников В.И., Власов В.Д., Власова Г.Н., Калашников С.Н.
- Устройство для определения потокосцепления ротора двигателя переменного тока. АС 1393099 кл.33/02, 1986. Калашников В.И., Власов В.Д., Рафиков Г.Ш., Власова Г.Н., Галкин М.В.