
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Огляд досліджень та розробок
- 3.1 Огляд міжнародних джерел
- 3.2 Огляд локальних джерел
- 4. Результати моделювання існуючих моделей бездатчикового регулювання
- Висновки
- Перелік посилань
Вступ
Зміна параметрів електричної машини під час роботи є принциповим обмеженням для створення систем бездатчикового електроприводу з глибоким регулюванням швидкості. Тому для вирішення цієї проблеми потрібно створити систему, здатну відстежувати параметри машини під час роботи і коригувати регулятори.
Дослідження показують, що зміна опору обмоток по-різному впливають на похибку визначення потокозчеплення і відповідно швидкості. Зміни опору ротора впливають на оцінку швидкості однаково у всьому діапазоні швидкостей, в той час як вплив зміни опору статора зростає зі зменшенням швидкості, що призводить до нескінченно більших помилок при нульовій швидкості. Тому першочерговим завданням є визначення опору статора.
Наступним обмеженням є відкрите інтегрування, яке неминуче для розрахунку потоку ротора. На низьких швидкостях дрейф нуля і перешкоди сильно впливають на результат оцінки.
1. Актуальність теми
Для переважної більшості електроприводів промислових механізмів в гірській, хімічної, металургійної та інших галузях з важкими умовами експлуатації важливе значення має створення регульованого електроприводу на базі асинхронного короткозамкнутого двигуна без застосування додаткових датчиків швидкості, магнітного потоку і температури двигуна. Ця необхідність обгрунтована підвищеними вимогами до надійності приводу. Тому рішення цього завдання буде мати важливе практичне значення.
Для таких приводів найбільш перспективною є концепція векторного управління без застосування датчика швидкості. На даний момент існує велика кількість методів, які з більшими чи меншими витратами вирішують цю задачу. При цьому потрібно зазначити, що складність методів зростає тим більше, чим ближче до нуля стає діапазон регулювання. Але так і не існує методу, який би добре справлявся з цим завданням.
Основною проблемою є те, що на практиці завжди існують відмінності між параметрами моделі і реальними параметрами асинхронного двигуна. Ці відхилення виникають насамперед за рахунок нагріву, а також різного магнітного використання двигуна при його експлуатації. Стосовно двигуна з класом ізоляції F і мідної обмоткою можливе відхилення активних опорів становить близько 50%. При цьому необхідно зазначити, що не всі параметри двигуна можуть бути точно визначені. Так, якщо опір статора можна виміряти, то опір ротора короткозамкнутого двигуна можна тільки обчислити. Інші параметри визначається з результатів дослідів холостого ходу і короткого замикання.
Аналіз помилок у визначенні ковзання показує, що для успішної роботи системи регулювання швидкості необхідне знання значення опору статора з точністю не нижче 5% [6].
2. Мета і задачі дослідження та заплановані результати
Об'єктом розробок і досліджень даної роботи є система векторного регулювання асинхронного двигуна з короткозамкненим ротором без датчика швидкості.
Мета роботи – вивчення методів оцінки вектора потокозчеплення і швидкості за доступними для вимірювання сигналів струму і напруги в діапазоні регулювання електроприводу 1: 100. Шляхом математичного моделювання оцінити вплив на працездатність системи зміни параметрів при нагріванні двигуна. А також вивчення методів відстеження зміни параметрів електричної машини під час її роботи. Можливість вимірювання параметрів під час роботи дозволить за рахунок коригування коефіцієнтів регуляторів побудувати систему для більш глибокого діапазону регулювання.
Результатом роботи стане побудова системи векторного регулювання, яка буде стійка до зміни параметрів в діапазоні регулювання 1: 100.
Для дослідження розроблених винаходів використовується метод математичного моделювання в графічному середовищі імітаційного моделювання динамічних систем Simulink (Matlab), орієнтованого на моделювання систем автоматичного регулювання.
3. Огляд досліджень та розробок
При роботі над темою були досліджені німецько- та англомовні джерела з даної теми. Були проаналізовані роботи таких вчених як Леонард, Блашке, Вас [4], найбільшої уваги заслуговує книга німецького професора Шредера [1]. У цій роботі класифіковані всі на сьогоднішній день наявні методи бездатчикового регулювання електроприводу. Також описані перспективи кожного методу і складності їх практичної реалізації. Тому подальший розгляд глобальних досліджень по цій темі буде засновано саме на цьому джерелі.
Всі методи бездатчикового регулювання електроприводу можна розділити на наступні види:
- Неадаптивні методи
- Адаптивні методи
- Нейронні мережі
- Непряме вимір
- Введення додаткових високочастотних сигналів
Неадаптивні методи
Це група методів, в основі якої лежить математична модель. За допомогою відомих сигналів струму і напруги розраховуються необхідні для регулювання величини. Вперше такий спосіб був описаний Г. Медером [3] в його дисертаційній роботі. На даний момент існує багато способів визначення ковзання на основі математичної моделі. Але головний недолік таких моделей – це відмінність параметрів математичної моделі від параметрів реальної машини, яке призводить до помилок обчислення.
Адаптивні методи
Дані спостерігачі можуть застосовуватися як в датчикову, так і в бездатчикового приводах. В їх основу також закладені моделі електромагнітних процесів, що відбуваються в двигуні. Ці спостерігачі будуються, як системи, що стежать і, крім моделі, містять ще регулятор адаптуючий модель до реальних процесів, що відбуваються в двигуні або приводі. Вони також називаються MRAS – спостерігачами (Motor Referanse Adaptive System) або спостерігачами з еталонною моделлю(Мал. 1). Використовувана тут еталонна модель відображає процеси в електродвигуні, а адаптивна - адаптується по якомусь параметру до еталонної моделі, використовуючи закон адаптації.
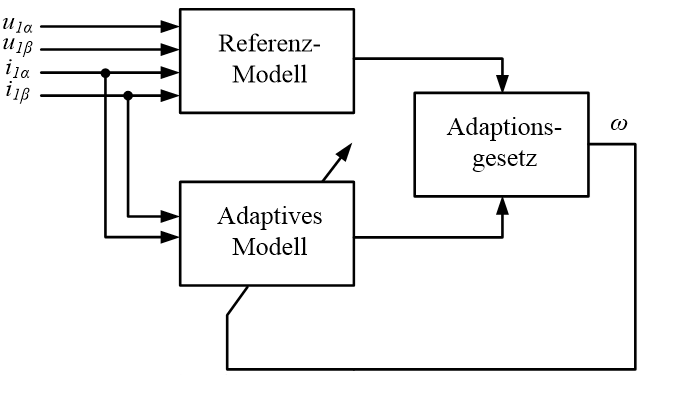
Малюнок 1 – Структурна схема адаптивного спостерігача
У 1993 році японський вчений Хісао Кубота спробував уникнути цієї початкової помилки. В якості еталонної моделі спостерігача він запропонував використовувати сам двигун, а в якості моделі, яка адаптується - модель повного порядку електромагнітних процесів АД. У своїй статті [5] він описав структуру цього спостерігача. Там же була викладена методика вибору параметрів спостерігача, виходячи з аналізу його стійкості. Запропонований спостерігач можна назвати спостерігачем Люенбергера (Мал. 2).
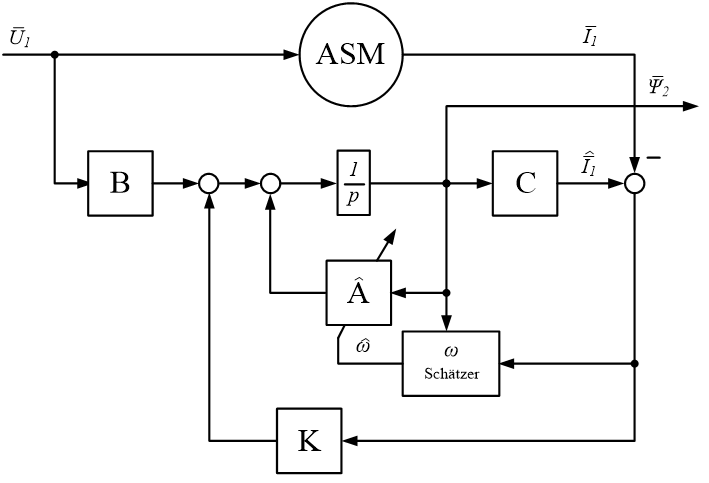
Малюнок 2 – Структурна схема спостерігача Люенбергера
Спостерігач на основі фільтра Калмана є певний цифровий фільтр, алгоритміка якого будується з урахуванням законів математичної статистики. Він дозволяє відновлювати невідомий параметр, мінімізуючи при цьому вплив перешкод вимірювання відомих величин. Спостерігач на основі фільтра Калмана характеризується складністю обчислювального алгоритму і теоретично повинен дозволяти отримувати високу точність спостереження. Реальна ж точність цього спостерігача залежить від точності знання, що вважаються відомими, параметрів двигуна і приводу. На практиці ці параметри точно не відомі і, більш того, ще можуть змінюватися в процесі роботи. Це обмежує точність і область використання, здавалося б, ідеального спостерігача.
Нейронні мережі
Завдяки здатності до навчання нейронних мереж, деякими вченими було запропоновано використовувати їх для оцінки швидкості і потокозчеплення ротора. Зазвичай використовують двошарові або тришарові нейромережі. Дослідження показали, що такі системи регулювання дуже складні в навчанні і не забезпечують бажану точність регулювання в діапазоні швидкостей близьких до нуля.
Непряме вимір (Вимірювання гармонійного складу пазівв)
Асинхронні машини зазвичай мають магнітно симетричну конструкцію, так що тут за допомогою додаткових заходів, таких як навмисне геометричне відкриття пазів ротора, досягається магнітна асиметрія. Ці вторинні ефекти призводять до появи додаткових сигналів, що мають іншу частоту (в загальному випадку оцінюється третя гармоніка) по відношенню до основній гармоніці.
Оцінка високочастотних гармонік відбувається переважно двома способами:
- FFT - Fast Fourier Transformation
- PLL-Systeme - Phase Locked Loop
Введення додаткових високочастотних сигналів
Цей спосіб заснований на введенні додаткових високочастотних сигналів і оцінки результуючих сигналів відповіді
.
3.2 Огляд локальних джерел
У ДонНТУ проблемами бездатчикового електроприводу займався професор В. І. Калашников. Результатом його роботи стали книга Векторне управління
асинхронним електроприводом
[6] і авторські свідоцтва на два винаходи Спосіб дослідження електричних машин змінного струму
[7] і Пристрій
для визначення потокозчеплення ротора двигуна змінного струму
[8]. У книзі детально описано побудову системи векторного регулювання на базі
асинхронного двигуна, силова частина, визначення параметрів при самоналаштуванні приводу, а також досліджено основні проблеми побудови
бездатчикових систем і запропоновано способи по їх усуненню.
В авторських свідоцтвах представлені моделі для вирішення головних проблем сучасних систем регулювання без датчика швидкості – це оцінка опору статора під час роботи приводу і усунення дрейфу нуля при відкритому інтегруванні в моделі визначення потокозчеплення ротора.
Спосіб дослідження електричних машин змінного струму
На малюнку 3 наведена схема пристрою, що реалізує даний спосіб; на фігурі 2 – блок-схема алгоритму роботи блоку обчислення фактичного значення квадрата модуля потокозчеплення; на фігурі 3 – блок-схема алгоритму роботи блоку обчислення квадрата модуля потокозчеплення ротора, що залежить від активного опору статора.
У cостав пристрою входять блок обчислення фактичного значення квадрата модуля потокозчеплення 1 (БВ 1), на входи якого подаються сигнали напруги, струму статора і кутовий частоти поля статора, блок обчислення квадрата модуля потокозчеплення ротора 2, залежить від активного опору статора БВ 2), на перші два входи якого подаються сигнали напруги та струму статора, перший елемент підсумовування 3, входами якого є вихід БВ 1 і перший вихід БВ 2, а вихід якого підключений до першого входу блоку поділу 4, другий вхід якого з'єднаний з першим виходом БВ 2, вихід блоку поділу підключений до третього входу БВ 2 і до першого входу другого елемента підсумовування 5, другий вхід якого з'єднаний з другим виходом БВ 2, а вихід підключений до четвертого входу БВ 2.
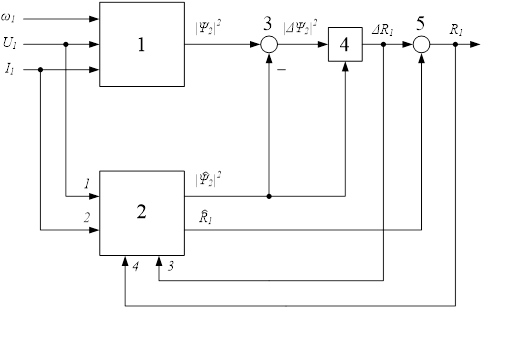
Малюнок 3 – Структурна схема моделі
Пристрій для визначення потокозчеплення ротора двигуна змінного струму
Пристрій для визначення потокозчеплення ротора двигуна змінного струму, що містить суматор, послідовно з'єднані інтегратор блок формування, яке відрізняється тим, що, з метою підвищення точності вимірювання, в нього введені фільтр низьких частот, два блоки пам'яті, нуль-орган і два амплітудних детектора, перші входи яких підключені до виходу блоку формування і до входу нуль-органу, вихід нуль-органу підключений до других входів амплітудних детекторів і до перших входів блоків пам'яті, другі входи блоків пам'яті підключені до виходів відповідних амплітудних детекторів, а виходи блоків пам'яті з'єднані з входами суматора, вихід якого підключений через фільтр низьких частот до другого входу інтегратора.
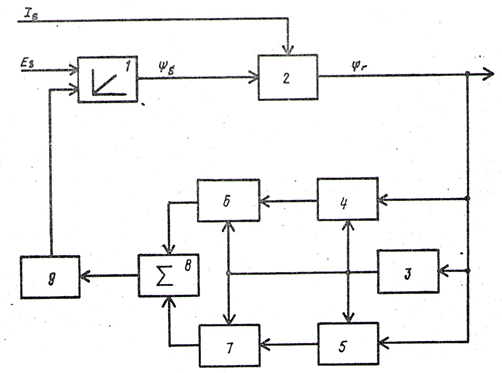
Малюнок 4 – Структурная схема моделі
4. Результати моделювання існуючих моделей бездатчикового регулювання
В ході роботи були вивчені різні методи регулювання швидкості електричного приводу без датчиків потокосцепления і швидкості в діапазоні регулювання 1:100.
При цьому було встановлено, що діапазон швидкостей 1: 100 прийнятний практично для всіх моделей, якщо параметри двигуна точно відомі. Зі зміненими опорами обмоток можна досягти тільки діапазон оборотів 1:10. При подальшому поглибленні регулювання виникають неприпустимі помилки, які роблять регулювання неможливим (Мал. 5).
Малюнок 5 – Вплив змінення опору на точність керування єлектропиводу
Таку чутливість до зміни параметрів можна пояснити тим, що в основі всіх методів оцінки лежить модель, яка правильно відтворює стан двигуна тільки в тому випадку, коли параметри моделі збігаються з поточними параметрами двигуна. Будь-які відхилення призводять до помилкових стані в спостерігачі.
Зміни опору ротора впливають на оцінку швидкості в рівній мірі по всьому діапазону оборотів. Вплив зміни опору статора збільшується зі зменшенням числа обертів, що призводить до нескінченних помилок фази і амплітуди при нульовій швидкості. Ця проблема не стосується методів розрахунку, що використовують реактивну потужність.
Подальше обмеження при використанні цих методів є відкрите інтегрування, неминуче для розрахунку потокосцепление ротора. При низьких швидкостях дрейф відкритого інтегрування і перешкоди впливають на результат оцінки. Незважаючи на всі спроби обійти відкрите інтегрування, модель не може бути використана в діапазоні оборотів близько нуля.
Для вирішення даних проблем були також вивчені методи непрямого визначення опору статора і збільшення точності визначення потокозчеплення ротора, запропоновані в своїх авторських свідоцтвах професором В. І. Калашниковим.
Дослідження системи оцінки опору статора показало високу точність визначення опору статора в межах його допустимих змін. Оцінене значення може бути використано в подальшому для коригування регуляторів, що містять в розрахунку коефіцієнтів це значення. Таким чином, можливо буде уникнути збільшення помилки регулювання швидкості, що є принциповим обмеженням для створення приводів з глибоким регулюванням.
Дослідження системи визначення потокозчеплення показало, що даний метод значно збільшує точність визначення потокозчеплення на низьких швидкостях обертання ротора, так як модель менше схильна до впливу перешкод і дрейфу нуля інтегратора. Такі властивості системи досягаються завдяки корекції помилки інтегрування кожні півперіоду обчислення. Дана модель може дозволити розширити діапазон регулювання електроприводу.
Висновки
Виконані розробки дозволяють перейти до побудови системи регулювання, яка буде забезпечувати надійну роботу в діапазоні 1: 100 при зміні параметрів двигуна.
Подальші дослідження спрямовані на наступні аспекти:
- Інтегрування системи визначення потокозчеплення і системи оцінки опору статора в систему векторного регулювання асинхронного двигуна без датчика швидкості
- Тестування синтезованої системи в різних режимах роботи (з різними значеннями опору обмоток, в різних діапазонах роботи і т. д.)
- Вивчення можливості практичної реалізації нової системи засобами мікропроцесорної техніки
Перелік посилань
- D. Schroder, Elektrische Antriebe – Regelung von Antriebssystemen, Berlin: Springer-Verlag, 2015.
- U. Riefenstahl, Elektrische Antriebstechnik, B. G. Teubner Stuttgart – Leipzig, 2000.
- Mader G. Regelung einer Asynchronmaschine unter alleiniger Verwendung an den Klemmen messbarer Groessen. Dissertation, TH Darmstadt, 1981.
- Vas P. Sensorless Vector and Direct Torque Control. – Oxford: Oxford University Press. – 1998.
- Kubota, H.; Matsuse, K. Speed sensorless field oriented control of induction motor with rotor resistance adaption. IEEE Industry Applications Society Annual Meeting 1993, Seattle, USA.
- Калашников В.И., Векторное управление асинхронным электроприводом, Донецк, ДонНТУ, 2009
- Способ исследования электрических машин переменного тока, АС 1514093, СССР кл. 0131/34, 1986, Калашников В.И., Власов В.Д., Власова Г.Н., Калашников С.Н.
- Устройство для определения потокосцепления ротора двигателя переменного тока. АС 1393099 кл.33/02, 1986. Калашников В.И., Власов В.Д., Рафиков Г.Ш., Власова Г.Н., Галкин М.В.