
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор исследований и разработок
- 3.1 Обзор международных источников
- 3.2 Обзор локальных источников
- 4. Результаты моделирования существующих моделей бездатчикового регулирования
- Выводы
- Список источников
Введение
Изменение параметров электрической машины во время работы является принципиальным ограничением для создания систем бездатчикового электропривода с глубоким регулированием скорости. Поэтому для решения этой проблемы нужно создать систему, способную отслеживать параметры машины во время работы и корректировать регуляторы.
Исследования показывают, что изменение сопротивления обмоток по-разному влияют на ошибку определения потокосцепления и соответственно скорости. Изменения сопротивления ротора влияют на оценку скорости одинаково во всем диапазоне скоростей, в то время как влияние изменения сопротивления статора возрастает с уменьшающейся скоростью, что приводит к бесконечно большим ошибкам при нулевой скорости. Поэтому первоочередной задачей является определение сопротивления статора.
Следующим ограничением является открытое интегрирование, которое неизбежно для расчета потока ротора. На низких скоростях дрейф нуля и помехи сильно влияют на результат оценки.
1. Актуальность темы
Для подавляющего большинства электроприводов промышленных механизмов в горной, химической, металлургической и других отраслях с тяжелыми условиями эксплуатации важное значение имеет создание регулируемого электропривода на базе асинхронного короткозамкнутого двигателя без применения дополнительных датчиков скорости, магнитного потока и температуры двигателя. Эта необходимость обоснована повышенными требованиями к надежности привода. Поэтому решение этой задачи будет иметь важное практическое значение.
Для таких приводов наиболее перспективной является концепция векторного управления без применения датчика скорости. На данный момент существует большое количество методов, которые с большими или меньшими затратами решают эту задачу. При этом нужно отметить, что сложность методов возрастает тем более, чем ближе к нулю становится диапазон регулирования. Но так и не существует метода, который бы хорошо справлялся с данной задачей.
Основной проблемой является то, что на практике всегда существуют различия между параметрами модели и реальными параметрами асинхронного двигателя. Эти отклонения возникают прежде всего за счет нагрева, а также различного магнитного использования двигателя при его эксплуатации. Применительно к двигателю с классом изоляции F и медной обмоткой возможное отклонение активных сопротивлений составляет порядка 50%. При этом необходимо отметить, что не все параметры двигателя могут быть точно определены. Так, если сопротивление статора можно измерить, то сопротивление ротора короткозамкнутого двигателя можно только вычислить. Другие параметры определяется из результатов опытов холостого хода и короткого замыкания.
Анализ ошибок в определении скольжения показывает, что для успешной работы системы регулирования скорости необходимо знание значения сопротивления статора с точностью не ниже 5% [6].
2. Цель и задачи исследования, планируемые результаты
Объектом разработок и исследований данной работы является система векторного регулирования асинхронного двигателя с короткозамкнутым ротором без датчика скорости.
Цель работы – изучение методов оценки вектора потокосцепления и скорости по доступным для измерения сигналам тока и напряжения в диапазоне регулирования электропривода 1:100. Путем математического моделирования оценить влияние на работоспособность системы изменения параметров при нагреве двигателя. А также изучение методов отслеживания изменяющихся параметров электрической машины во время ее работы. Возможность измерения параметров во время работы позволит за счет корректировки коэффициентов регуляторов построить систему для более глубокого диапазона регулирования.
Результатом работы станет построение системы векторного регулирования, которая будет устойчива к изменению параметров в диапазоне регулирования 1:100.
Для исследования разработанных изобретений используется метод математического моделирования в графической среде имитационного моделирования динамических систем Simulink(Matlab), ориентированного на моделирование систем автоматического регулирования.
3. Обзор исследований и разработок
3.1 Обзор международных источников
При работе над темой были исследованы немецко- и англоязычные источники по данной теме. Были проанализированы работы таких ученых как Леонард, Блашке, Вас [4], Наибольшего внимания заслуживает книга немецкого профессора Шредера [1]. В этой работе классифицированы все на сегодняшний день имеющиеся методы бездатчикового регулирования электропривода. Также описаны перспективы каждого метода и сложности их практической реализации. Поэтому дальнейшее рассмотрение глобальных исследований по этой теме будет основано именно на этом источнике.
Все методы бездатчикового регулирования электропривода можно разделить на следующие виды:
- Неадаптивные методы
- Адаптивные методы
- Нейронные сети
- Непрямое измерение
- Введение дополнительных высокочастотных сигналов
Неадаптивные методы
Это группа методов, в основе которой лежит математическая модель. С помощью известных сигналов тока и напряжения рассчитываются необходимые для регулирования величины. Впервые такой способ был описан Г. Мэдером [3] в его диссертационной работе. На данный момент существует много способов определения скольжения на основе математической модели. Но главный недостаток таких моделей – это отличие параметров математической модели от параметров реальной машины, которое приводит к ошибкам вычисления.
Адаптивные методы
Данные наблюдатели могут применяться как в датчиковых, так и в бездатчиковых приводах. В их основу также заложены модели электромагнитных процессов происходящих в двигателе. Эти наблюдатели строятся, как следящие системы и, кроме модели, содержат еще регулятор адаптирующий модель к реальным процессам, происходящим в двигателе или приводе. Они также называются MRAS – наблюдателями (Motor Referanse Adaptive System) или наблюдателями с эталонной моделью (Рис. 1). Используемая здесь эталонная модель отражает процессы в электродвигателе, а адаптивная – адаптируется по какому-либо параметру к эталонной модели, используя закон адаптации.
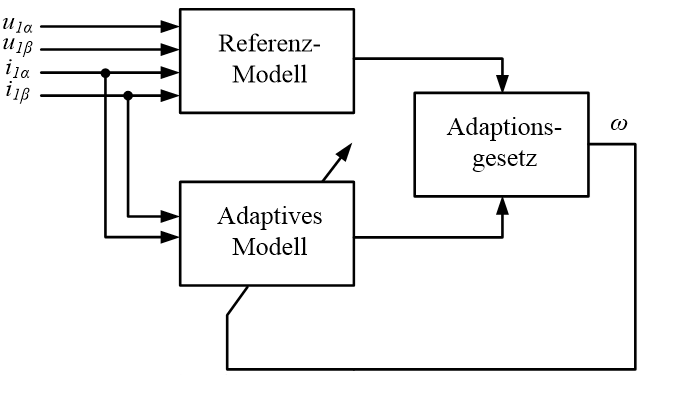
Рисунок 1 – Структурная схема адаптивного наблюдателя
В 1993 году японский ученый Хисао Кубота предпринял попытку избежать этой изначальной ошибки. В качестве эталонной модели наблюдателя он предложил использовать сам двигатель, а в качестве адаптируемой модели – модель полного порядка электромагнитных процессов АД. В своей статье [5] он описал структуру этого наблюдателя. Там же была изложена методика выбора параметров наблюдателя, исходя из анализа его устойчивости. Предложенный наблюдатель можно назвать наблюдателем Люенбергера (Рис. 2).
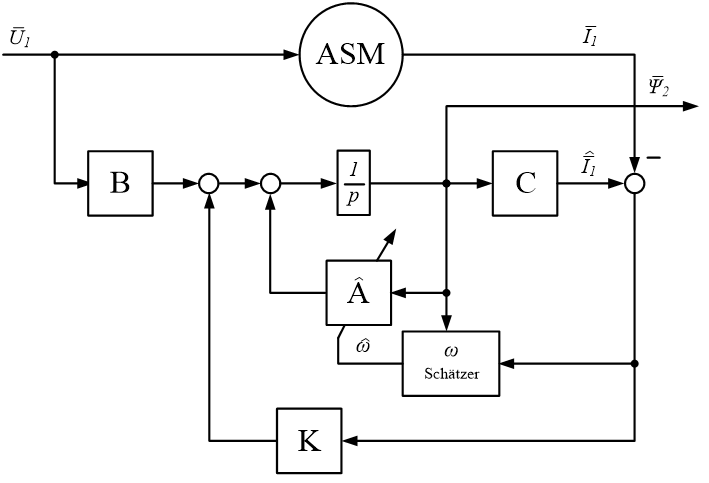
Рисунок 2 – Структурная схема наблюдателя Люенбергера
Наблюдатель на основе фильтра Калмана представляет собой некоторый цифровой фильтр, алгоритмика которого строится с учетом законов математической статистики. Он позволяет восстанавливать неизвестный параметр, минимизируя при этом влияние помех измерения известных величин. Наблюдатель на основе фильтра Калмана характеризуется сложностью вычислительного алгоритма и теоретически должен позволять получать высокую точность наблюдения. Реальная же точность этого наблюдателя зависит от точности знания, считающихся известными, параметров двигателя и привода. На практике эти параметры точно не известны и, более того, еще могут изменяться в процессе работы. Это ограничивает точность и область использования, казалось бы, идеального наблюдателя.
Нейронные сети
Благодаря способности к обучению нейронных сетей, некоторыми учеными было предложено использовать их для оценки скорости и потокосцепления ротора. Обычно используют двухслойные или трехслойные нейросети. Исследования показали, что такие системы регулирования очень сложны в обучении и не обеспечивают желаемую точность регулирования в диапазоне скоростей близких к нулю.
Непрямое измерение (Измерение гармонического состава пазов)
Асинхронные машины обычно имеют магнитно симметричную конструкцию, так часто в двигателях с помощью дополнительных мер, таких как намеренное геометрическое открытие пазов ротора, добиваются магнитной асимметрии. Эти вторичные эффекты приводят к появлению дополнительных сигналов, имеющих другую частоту (в общем случае оценивается третья гармоника) по отношению к основной гармонике.
Оценка высокочастотных гармоник происходит преимущественно двумя способами:
- FFT - Fast Fourier Transformation
- PLL-Systeme - Phase Locked Loop
Введение дополнительных высокочастотных сигналов
Этот способ основан на введении дополнительных высокочастотных сигналов и оценке результирующих ответных
сигналов.
3.2 Обзор локальных источников
В ДонНТУ проблемами бездатчикового электропривода занимался профессор В. И. Калашников. Результатом его работы стали книга Векторное управление
асинхронным электроприводом
[6] и авторские свидетельства на два изобретения Способ исследования электрических
машин переменного тока
[7] и Устройство для определения потокосцепления ротора двигателя переменного тока
[8]. В книге подробно описано построение системы векторного регулирования на базе асинхронного двигателя, силовая часть,
определение параметров при самонастройке привода, а также исследованы основные проблемы построения бездатчиковых систем и предложены способы
по их устранению.
В авторских свидетельствах представлены модели для решения главных проблем современных систем регулирования без датчика скорости – это оценка сопротивления статора во время работы привода и устранение дрейфа нуля при открытом интегрировании в модели определения потокосцепления ротора.
Способ исследования электрических машин переменного тока
На рисунке 3 приведена схема устройства, реализующего данный способ; на фигуре 2 – блок-схема алгоритма работы блока вычисления фактического значения квадрата модуля потокосцепления; на фигуре 3 – блок-схема алгоритма работы блока вычисления квадрата модуля потокосцепления ротора, зависящего от активного сопротивления статора.
В cостав устройства входят блок вычисления фактического значения квадрата модуля потокосцепления 1 (БВ 1), на входы которого подаются сигналы напряжения, тока статора и угловой частоты поля статора, блок вычисления квадрата модуля потокосцепления ротора 2, зависящего от активного сопротивления статора (БВ 2), на первые два входа которого подаются сигналы напряжения и тока статора, первый элемент суммирования 3, входами которого являются выход БВ 1 и первый выход БВ 2, а выход которого подключен к первому входу блока деления 4, второй вход которого соединен с первым выходом БВ 2, выход блока деления подключен к третьему входу БВ 2 и к первому входу второго элемента суммирования 5, второй вход которого соединен с вторым выходом БВ 2, а выход подключен к четвертому входу БВ 2.
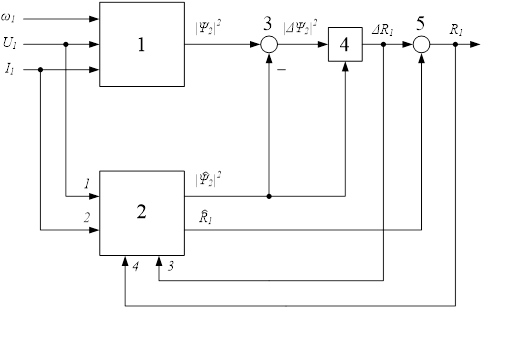
Рисунок 3 – Структурная схема модели
Устройство для определения потокосцепления ротора двигателя переменного тока
Устройство для определения потокосцепления ротора двигателя переменного тока (Рис. 4), содержащее сумматор, последовательно соединенные интегратор блок формирования, отличающееся тем, что, с целью повышения точности измерения, в него введены фильтр низких частот, два блока памяти, нуль-орган и два амплитудных детектора, первые входы которых подключены к выходу блока формирования и к входу нуль-органа, выход нуль-органа подключен к вторым входам амплитудных детекторов и к первым входам блоков памяти, вторые входы блоков памяти подключены к выходам соответствующих амплитудных детекторов, а выходы блоков памяти соединены с входами сумматора, выход которого подключен через фильтр низких частот ко второму входу интегратора.
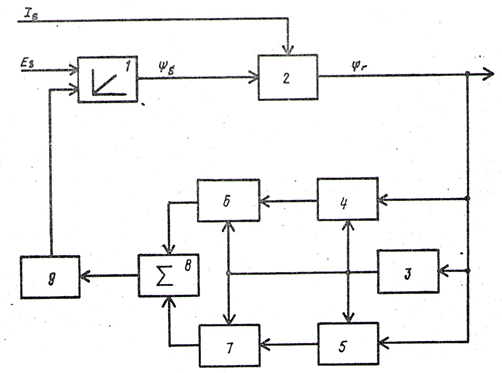
Рисунок 4 – Структурная схема модели
4. Результаты моделирования существующих моделей бездатчикового регулирования
В ходе работы были изучены различные методы регулирования скорости электрического привода без датчиков потокосцепления и скорости в диапазоне регулирования 1:100.
При этом было установлено, что диапазон скоростей 1:100 приемлем практически для всех моделей, если параметры двигателя точно известны. С измененными сопротивлениями обмоток можно достигнуть только диапазон оборотов 1:10. При дальнейшем углублении регулирования возникают недопустимые ошибки, которые делают регулировку невозможной (Рис. 5).
Рисунок 5 – Влияние изменения сопротивления на точность регулирования скорости электропривода
Такую чувствительность к изменению параметров можно объяснить тем, что в основе всех методов оценки лежит модель, которая правильно воспроизводит состояние двигателя только в том случае, когда параметры модели совпадают с текущими параметрами двигателя. Любые отклонения приводят к ошибочным состояниям в наблюдателе.
Изменения сопротивления ротора влияют на оценку скорости в равной степени по всему диапазону оборотов. Влияние изменения сопротивления статора увеличивается с уменьшением числа оборотов, что приводит к бесконечным ошибкам фазы и амплитуды при нулевой скорости. Эта проблема не касается методов расчета, использующих реактивную мощность.
Дальнейшее ограничение при использовании этих методов представляет собой открытое интегрирование, неизбежное для расчета потокосцепление ротора. При низких скоростях дрейф открытого интегрирования и помехи влияют на результат оценки. Несмотря на все попытки обойти открытое интегрирование, модель не может быть использована в диапазоне оборотов около нуля.
Для решения данных проблем были также изучены методы косвенного определения сопротивления статора и увеличения точности определения потокосцепления ротора, предложенные в своих авторских свидетельствах профессором В. И. Калашниковым.
Исследование системы оценки сопротивления статора показало хорошую точность определения сопротивления статора в пределах его допустимого изменения. Оцененное значение может быть использовано в дальнейшем для корректировки регуляторов, содержащих в расчете коэффициентов это значение. Таким образом, можно будет избежать увеличения ошибки регулирования скорости, что является принципиальным ограничением для создания приводов с глубоким регулированием.
Исследование системы определения потокосцепления показало, что данный метод значительно увеличивает точность определения потокосцепления на низких скоростях вращения ротора, так как модель меньше подвержена влиянию помех и дрейфа нуля интегратора. Такие свойства системы достигаются благодаря коррекции ошибки интегрирования каждые полпериода вычисления. Данная модель может позволить расширить диапазон регулирования электропривода.
Выводы
Выполненные разработки позволяют перейти к построению системы регулирования, которая будет обеспечивать надежную работу в диапазоне 1:100 при изменении параметров двигателя.
Дальнейшие исследования направлены на следующие аспекты:
- Интегрирование системы определения потокосцепления и системы оценки сопротивления статора в систему векторного регулирования асинхронного двигателя без датчика скорости
- Тестирования синтезированной системы в различных режимах работы (с различными значениями сопротивления обмоток, в различных диапазонах работы и т. д.)
- Изучение возможности практической реализации новой системы средствами микропроцессорной техники
Список источников
- D. Schroder, Elektrische Antriebe – Regelung von Antriebssystemen, Berlin: Springer-Verlag, 2015.
- U. Riefenstahl, Elektrische Antriebstechnik, B. G. Teubner Stuttgart – Leipzig, 2000.
- Mader G. Regelung einer Asynchronmaschine unter alleiniger Verwendung an den Klemmen messbarer Groessen. Dissertation, TH Darmstadt, 1981.
- Vas P. Sensorless Vector and Direct Torque Control. – Oxford: Oxford University Press. – 1998.
- Kubota, H.; Matsuse, K. Speed sensorless field oriented control of induction motor with rotor resistance adaption. IEEE Industry Applications Society Annual Meeting 1993, Seattle, USA.
- Калашников В.И., Векторное управление асинхронным электроприводом, Донецк, ДонНТУ, 2009
- Способ исследования электрических машин переменного тока, АС 1514093, СССР кл. 0131/34, 1986, Калашников В.И., Власов В.Д., Власова Г.Н., Калашников С.Н.
- Устройство для определения потокосцепления ротора двигателя переменного тока. АС 1393099 кл.33/02, 1986. Калашников В.И., Власов В.Д., Рафиков Г.Ш., Власова Г.Н., Галкин М.В.