
Содержание
- Введение
- 1. Описание объекта управления
- 2. Методы демпфирования
- 2.1. С корректирующей обратной связью и без
- 2.2. C оптимизацией по модульному оптимуму
- Выводы
- Список источников
- 2.2. C оптимизацией по модульному оптимуму
1. Введение
Наличие упругих звеньев, в механической части, является причиной колебаний в системе, что отражается на качестве переходных процессов, что в последствии ведет к росту электрических динамических нагрузок, и также создает дополнительные механические нагрузки, что в конечном счете может отразиться на сроке службы оборудования.
Целью исследования является сравнение методов демпфирования и реализация системы на практике.
2. Описание объекта управления
Объект управления – механизм перемещения моста мостового крана.
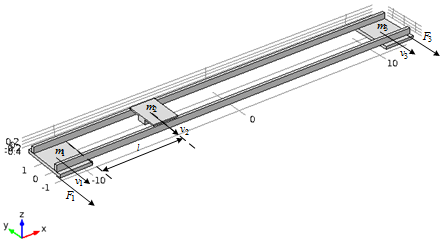
Рисунок 1 – Объект управления
Для упрощения схемы, представим мост в виде двух цельных металлических профилей с сечением прямоугольной формы и пониженной плотности, и заниженым значением модуля упругости материала так, чтобы вес конструкции примерно соответствовал реальным данным. Далее расположим тележку по средине моста и приложим к крайним частям нашей конструкции усилие, которое соответствует разгону моста до скорости 0.5 м/с за 1 с при отработке трапецеидального закона изменения скорости.
Рисунок 2 – Расчётная схема процесса раскачивания груза
Изменения скоростей крайних точек моста v1 и тележки v2, которая находится в его средней точке, приведены на графиках рис.3. Видно, что точки конструкции осуществляют незатухающие колебания, которые постепенно ухудшают прочность и в последствии могут стать причиной выхода крана из строя, а также травм работников.
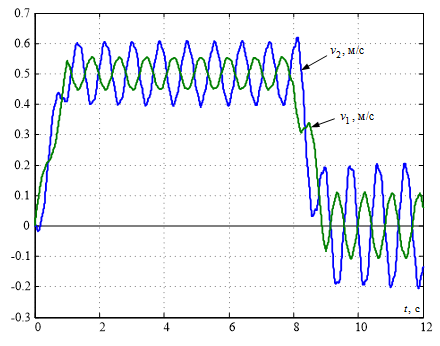
Рисунок 3 – Переходные процессы скоростей движения упругой конструкции мостового крана
Для подавления незатухающих колебаний нужно синтезировать соответствующую систему управления скоростью перемещения моста, для этого необходимо наличие линейной математической модели объекта регулирования.
Математическую модель объекта можно составить на основе кинематических схем многомассовых систем (приведены на рис. 3).
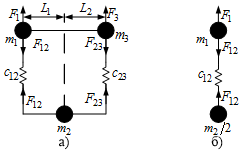
Рисунок 4 – Кинематическая модель моста
На рис.3а мост представлен в виде трех сосредоточенных масс – крайних точек m1 и m3, связанными упругими связями с коэффициентами жесткости с12 и с23 с точкой m2, в которой находится тележка.
Если расположить тележку посередине моста (L1=L2), то коэффициенты жесткости упругих связей необходимо задать одинаковыми. Если при таком расположении элементов между собой равны и массы, сосредоточенные на концах моста, а также приложенные к ним силы, на одинаковом расстоянии от опор, массы которых равны, то кинематическую схему нашего объекта управления можно упростить до двухмассовой, оставив одну опору и центральную точку, массу которой необходимо уменьшить в 2 раза. Кинематическая схема для этого случая представлена на рис.3б. Ее математическое описание будет иметь такой вид:
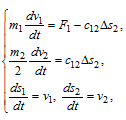
где F1 – сила, прилагаемая к первой массе, F12 – упругая сила, Δs2=s1–s2 – величина упругой деформации.
Если мы знаем значения сосредоточенных масс и постоянной времени упругих колебаний двухмассовой системы T12=1/2/π/f, то мы сможем рассчитать коэффициент жесткости:
Где:
Так, используя некоторые упрощения, мы преобразовали сложную трехмассовую кинематическую систему в более простую двухмассовую модель, на которой будет намного легче проводить опыты и реализовывать систему управления с целью гашения упругих колебаний.
2. Методы демпфирования
2.1 Сравнение системы подчиненного регулирования скорости без корректирующих обратных связей.
Имея приближенную модель объекта регулирования, синтезируем систему управления скоростью. Для управления приводами колес моста используем систему подчиненного регулирования скорости. Контур тока выражен в виде апериодических звеньев с постоянными времени ТТ.
Рисунок 5 – Структурная схема системы подчиненного регулирования скорости трехмассового объекта разомкнутой системы.
Возьмем следующие значения ТТ=4 мс, Тс1=Тс2=2ТТ. Примем, что длина моста L=20 м, а тележка расположена на расстоянии l=8 м от левого края моста, где расположена масса m1. Получаем следующие графики:
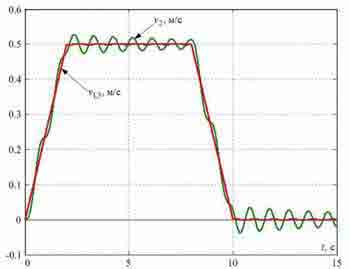
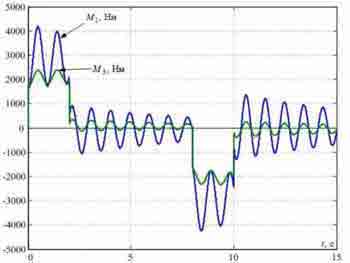
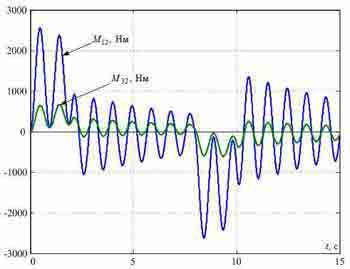
Рисунок 6 – Переходные процессы в типовой СПРС, синтезированной без учета упругости металлических конструкций.
На графиках видно – упругие колебания медленно затухают. Их можно уменьшить, добавив корректирующие обратные связи двух масс заведенных на вход регулятора:
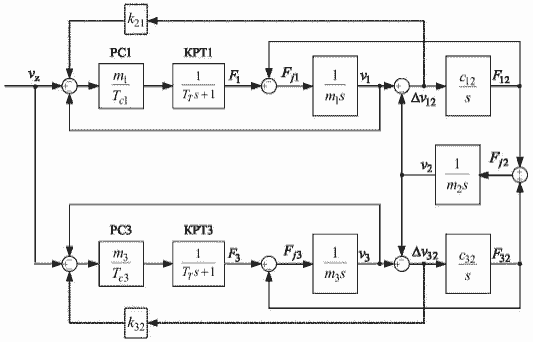
Рисунок 7 – Структурная схема системы подчиненного регулирования скорости трехмассового объекта с замкнутой системой
С учетом упругостей металлических конструкций:
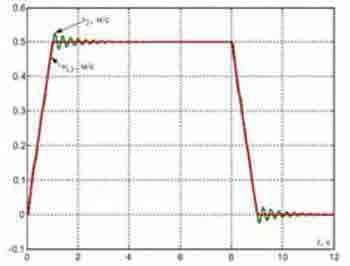
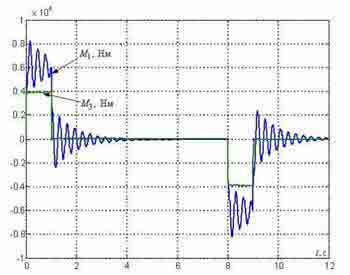
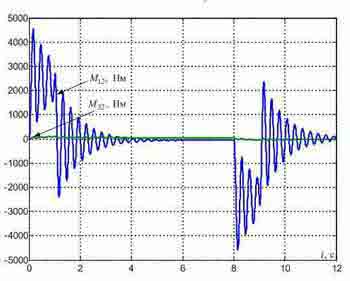
Рисунок 8 – Переходные процессы в типовой СПРС, синтезированной c учетом упругости металлических конструкций.
2.2 Система подчиненного регулирования скорости с корректирующими обратными связями по разностям скоростей перемещающихся масс с оптимизацией замкнутых контуров скорости по модульному оптимуму
Следующим методом демпфирования упругих колебаний, в двухмассовых системах, является введение обратных связей для определения разности скоростей перемещения масс с оптимизацией замкнутых контуров скорости по модульному оптимуму.
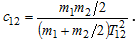
Для начала рассмотрим структурную схему трехмассовой системы рис.9, где F1, F2, F3 – сила, создаваемая приводными двигателями колес; F12 F32 – упругие силы взаимодействия сосредоточенны масс, c12, c32 – коэффициенты упругости; v1, v2, v3 – скорость точек, в которых располагаются массы m1, m2, m3.
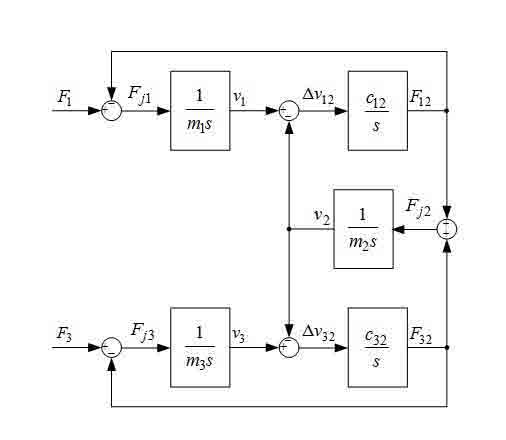
Рисунок 9 – Структурная схема трехмассовой системы
В системе используется два электропривода, следовательно, необходимо определить две постоянные времени для регуляторов скорости и два коэффициента обратных связей.
Оптимизировать замкнутый контур скорости будем по модульному оптимуму. Запишем передаточную функцию от задания на скорость до скорости второй массы:


– частоты колебаний движущихся масс;

– частоты собственных упругих колебаний автономных двухмассовых систем с сосредоточенными массами m1-m2 и m3-m2;

– корень характеристического полинома трехмассовой системы;

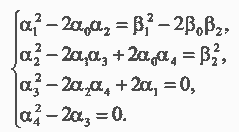
– частоты собственных упругих колебаний трехмассовой системы. Для полученной передаточной функции составляем уравнение, которое обеспечит достижения модульного оптимума. Для определения постоянных времени Tc1, Tc3 и коэффициенты обратных связей k12, k32, нужно решить систему из 4-х уравнений с 4-мя неизвестными:
Для начала, можно использовать значения коэффициентов обратных связей и постоянных времени, которые мы получили при оптимизации двухмассовых систем.
Исследуем процесс демпфирование упругих колебаний. Возьмем такие параметры объекта регулирования m1=m2=m3=20, c12=4000, и c32=2*c12. Результат виден на рис.10 а). Также рассчитаем параметры для таких значений 1)m1=5кг m2=m3=20 кг, c32=2*c12; 2) m1=60 кг, m2=m3=20, c32=2*c12. Результат на рис.10 б), в).
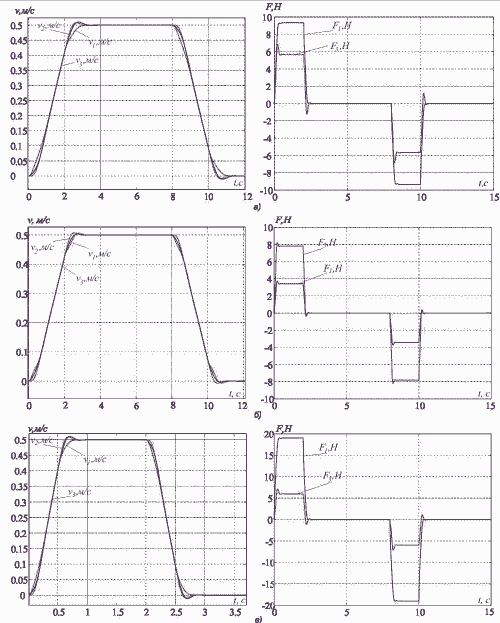
Рисунок 10 – Графики переходных процессов системы подчиненного регулирования
Как видно на графиках, во всех случаях упругие колебания успешно демпфируются. Переходные процессы незначительно меняются, есть перерегулирование до 10% что приемлемо. Таким образом, данный метод демпфирования эффективно подавляет упругие колебания в широком диапазоне соотношений движущихся масс и частот упругих колебаний.
Реализовывать систему устранения колебаний будем в программном пакете для динамического моделирования технических систем SimInTech. Основными направлениями использования SimInTech являются создание моделей, проектирование алгоритмов управления, их отладка на модели объекта, с последующей генерацией исходного кода на языке Си для программируемых контроллеров. В частности в проекте используется контроллер STM32f407VET6. Частота тактирования составляет 168МГц, объем Flash-памяти составляет 512 кбайт, 128 кбайта SRAM-памяти. Производительности данного контроллера вполне достаточно для наших задач. Также, помимо контроллера нам понадобится 3-х осевой акселерометр для получения сигнала обратной связи с движущихся масс.
Выводы
- Толочко О. І., Коцегуб П. Х., Федоряк Р. В. Дослідження впливу середньогеометрічного кореня характеристичного полінома на властивості системи модального керування двомасовим електромеханічним об‘єктом // Наукові праці ДонДТУ. Серія „Електротехніка і енергетика”. – Донецьк: ДонДТУ. – 2002. – №41. – С. 146-155
- Александров Е. Е., Кузнецов Б. И., Радиевский А. Е., Тернюк Н. Э. Оптимизация электромеханических систем с упругими связями. – Харьков: IMIC, 1995. – 304 с
- Коцегуб П. Х., Баринберг В. А., Толочко О. И., Федоряк Р. В. Оптимизация двухмассовых систем регулирования скорости // Известия вузов. Электромеханика. – 1998. – №4. – С. 54-57.
- Божко В. И. Бажутин Д. В. Подавление упругих колебаний в трёхмассовых электромеханических системах путем введения корректирующих обратных связей по разностям скоростей движущихся масс Перспективы развития электротехнических, электромеханических и энергосберегающих систем – 2016/ Материалы II международной научно-технической конференции студентов, аспирантов и молодых ученых. – Донецк, ДонНТУ – 2016, Том 2, с. 235-238
- Борцов Ю.А., Соколовский Г.Г. Автоматизированный электропривод с упругими связями. – СПб.: Энергоатомиздат, 1992. – 288 с.
- Макурин А. В., Морозов Д. И. Динамика продольного перемещения мостового крана с учетом упругости элементов конструкции // Электротехнические и компьютерные системы. – 2011. – № 3 (79). – С. 167–169.
- Бажутин Д. В. Моделирование упругих колебаний конструкций крановых установок в пакете Comsol Multiphysics. Научные работы ВНТУ, 2013, № 4
СПРС, синтезированная, без учета упругих связей демпфирует колебания очень слабо;
СПРС с дополнительными корректирующими связями по разности скоростей эффективно гасит упругие колебания, хотя и отличается несколько повышенным перерегулированием по суммарному упругому моменту и наличием небольшого перерегулирования по скоростям. Основным преимуществом этой системы является простота ее реализации, т.к. все сигналы обратных связей легко измеряются.