
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Объект и цель исследования, планируемые результаты
- 3. Общие положения о СИФУ
- 3.1 Назначение СИФУ
- 3.2 Классификация СИФУ
- 3.3 Принцип вертикального управления
- Выводы
- Список источников
Введение
Колоссальное развитие всех отраслей промышленности зависит от уровня автоматизации производства. Для автоматизации производств необходимы источники механической энергии разной мощности. На крупных производствах в качестве источников механической энергии выступают электродвигатели. Одним из самых первых придуманных двигателей, но все еще актуальным, является двигатель постоянного тока.
1. Актуальность темы
Большинству производств для выполнения сложных технологических процессов производства вместе с двигателем необходима и система управления этим двигателем или двигателями выполняющими одну и туже работу. Такая система обеспечивает разные рабочие механические характеристики и обеспечивает двигатель нужными выходными параметрами (момент и скорость вращения вала двигателя). Для управления двигателем постоянного тока используют тиристорный преобразователь и систему управления им. Систему управления тиристорным преобразователем двигателя постоянного тока называют импульсно фазовой из-за принципа ее функционирования. Целью работы является создание полноценной СИФУ на базе платы STM3F4, которая обеспечит широкий диапазон регулирования ДПТ.
2. Объект и цель исследования, планируемые результаты
Объектом разработок и исследований является трехфазный нереверсивный тиристоры преобразователь постоянного тока исполненный по мостовой схеме.
Цель работы – разработка системы импульсно-вазового управления трехфазным нереверсивным тиристорным преобразователем постоянного тока исполненным по мостовой схеме на базе платы STM32F4. Разработки выполнялись на основании лекций по системам управления тиристорными преобразователями. Работа выполнена с использованием методов математического моделирования. Выполнено моделирование системы импульсно-вазового управления трехфазным нереверсивным тиристорным преобразователем постоянного тока исполненным по мостовой схеме с применением программного пакета Matlab и его основного дополнения Simulink. В результате разработана модель системы импульсно-вазового управления трехфазным нереверсивным тиристорным преобразователем постоянного тока исполненным по мостовой схеме
3. Общие положения о СИФУ
Силовые электронные устройства состоят из силовой части и системы управления (СУ). К силовой части относятся электрические цепи и элементы, которые непосредственно участвуют в передаче электрической энергии от первичного источника к потребителю. Иногда эти цепи совместно с силовыми элементами называют главными, так как они определяют основные технико-экономические показатели силового электронного устройства и, в первую очередь, его КПД. Силовая часть аппарата является силовым исполнительным органом, определяющим главные функции преобразователя. Например, силовая часть однополупериодного тиристорного выпрямителя состоит из одного тиристора и электрических соединений, обеспечивающих его связь с коммутируемой электрической цепью. Учитывая определяющее влияние силовой части на технико-экономические характеристики устройства в целом, ее изучению уделяют основное внимание. Для функционирования силовых транзисторов, тиристоров и других приборов на них необходимо подавать соответствующие сигналы управления. Эти сигналы формируются системой управления, которая обрабатывает и выдает информацию, а также формирует импульсы управления электронными ключами силовой части схемы. Поэтому СУ состоит из элементов и функциональных узлов, связанных с обработкой информационных потоков и формированием импульсов управления. При этом потребляемую СУ энергию стремятся по возможности минимизировать. К системе управления относятся также элементы и узлы, обеспечивающие текущий контроль состояния устройства в целом, диагностику отказов и управление защитными устройствами.
На рисунке 1.1 в обобщенной структурной схеме выделены некоторые функциональные блоки. Блок датчиков Д содержит датчики регулируемых и контролируемых параметров. Так как обычно регулируются выходные параметры, то часть датчиков непосредственно входит в обратную связь канала регулирования. Сигналы от этих датчиков поступают на регулятор РЕГ, в функции которого входит формирование закона управления элементами силовой части.
Формирователь импульсов управления ФИУ является согласующим устройством между входами силовых приборов и выходом регулятора. Блок ФИУ формирует импульсы управления, непосредственно поступающие на силовые элементы. Сигналы регулятора являются сигналами малой мощности и не отвечают требованиям, предъявляемым к импульсам управления силовых приборов (тиристоров, транзисторов и др.).
Формирователь импульсов управления, функционально, а часто и конструктивно законченное устройство, называют также драйвером
(drive – водить).
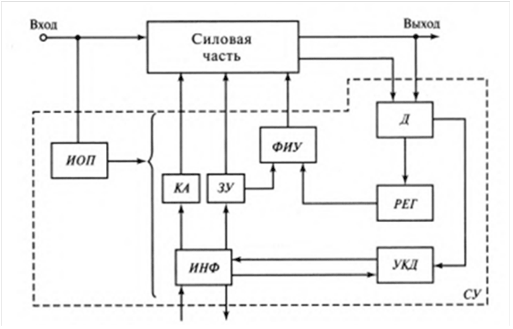
Рисунок 1.1 – Обобщенная структурная схема системы управления
3.1 Назначение СИФУ
Система имульсно-фазового управления (СИФУ) преобразовательного устройства предназначена для генерирования и распределения импульсов управления определенной длительности и формы, распределения их по соответствующим фазам в многофазных системах и изменения момента подачи этих импульсов на управляющие электроды тиристоров преобразователя. В преобразовательных устройствах находят применение полууправляемые силовые полупроводниковые приборы (СПП) – тиристоры, симисторы, полностью управляемые СПП - запираемые тиристоры GTO, IGCT, а также транзисторы IGBT. Основной задачей СИФУ является преобразование аналогового сигнала в импульсные сигналы управления по углу, регулирование среднего выпрямленного напряжения Uтп тиристорного преобразователя (ТП) в зависимости от уровня, полярности напряжения управления Uу, т.е. формирование выходного напряжения ТП в соответствии с уравнением:
где К – коэффициент передачи ТП, не зависящий от режима работы питающей сети и нагрузки в цепи выпрямленного тока.
Система импульсно-фазового управления ТП должна создавать синхронизированную с напряжением сети систему импульсов, сдвигаемую во времени в зависимости от величины управляющего воздействия, с целью регулирования выходного напряжения (тока).
Требования, предъявляемые к СИФУ, определяются рядом факторов:
- физическими процессами в полупроводниковых приборах;
- особенностями самой схемы преобразователя;
- особенностями нагрузки.
Таким образом, СИФУ должна обеспечивать:
- достаточную амплитуду и ток управляющих импульсов, выбираемую для тиристоров по диаграмме управления;<
- достаточную крутизну управляющих импульсов (не менее 0,5 – 1,0 А/мкс). Крутизна особенно важна при параллельном и последовательном соединении тиристоров;
- требуемый диапазон регулирования угла управления в зависимости от назначения преобразователей. Так, например, при активной нагрузке максимально возможный диапазон регулирования для однофазных выпрямителей должен составлять 180 эл. град, для трехфазного выпрямителя с нулевым выводом – 150 эл. град, для трехфазного мостового выпрямителя – 120 эл. град;
- достаточную длительность управляющих импульсов: а) с точки зрения физики работы тиристора – 20 мкс; б) исходя из особенностей схемы, в трехфазной мостовой схеме требуется длительность импульсов более 60 эл.град, или нужно применять сдвоенные импульсы; в) исходя из особенностей нагрузки, при активно-индуктивной нагрузке с большой индуктивностью необходимо применять длинные импульсы (120 эл. град в трехфазных схемах);
- гальваническое разделение выхода СИФУ и управляющего перехода силового тиристора;
- достаточное быстродействие, чтобы за время до включения очередного тиристора в полном диапазоне сдвинулся управляющий импульс (не более 3…6 мс);
- достаточную симметрию управляющих импульсов (допустимая не симметрия меньше 1 – 2 эл. град);
- высокую помехоустойчивость как со стороны информационного входа, так и со стороны сети (СИФУ должна сохранять свою работоспособность в частотном диапазоне сигналов помех от 50 до 1200 Гц, допустимые коммутационные провалы напряжения сети 100% на 5 эл.град).
В СИФУ применяются управляющие импульсы малой и большой длительности, а также импульсы с высокочастотным заполнением (импульсный пакет
).
Импульсы малой длительности (рисунок 1.3а), как правило, не превышают 20 эл. град. Сигналы управления большой длительности (рисунок 1.3б) имеют tи на уровне 120 эл. град, а их усилители мощности в первую очередь характеризуются высокими массогабаритными показателями импульсного трансформатора.
Для устранения данного недостатка применяются импульсы с высокочастотным заполнением (рисунок 1.3в), когда в течение требуемого интервала времени tи на управляющий электрод вентиля подается «пакет», состоящий из серии высокочастотных импульсов длительностью tи*, зависящей от динамических характеристик тиристора и выбирается из условия tи = (3…5)х tвкл , где tвкл – время включения тиристора при максимальном анодном токе (Рисунок 1.2).
Рисунок 1.2 – Зависимость выходного напряжения от времени подачи сигнала управления.
Рисунок анимирован. Количество кадров равно 5. Объем 26,2 Кб
При пакетном
управлении интервал паузы tп между соседними импульсами не более 0,5 х tвыкл, где tвыкл – время выключения тиристора при максимальном анодном токе. Как правило, tвыкл = 10 х tвкл , поэтому считают, что tи = tп = (3…5) х tвкл.

Рисунок 1.3 – Формы импульсов управления тиристорами
3.2 Классификация СИФУ
По принципу действия СИФУ подразделяются на:
- Электронные (полупроводниковые), построенные на серийных интегральных микросхемах аналогового (дискретного) и цифрового типа с малой степенью интеграции.
- В зависимости от того, как вырабатываются управляющие импульсы для каждого тиристора преобразователя - одним электронным блоком или отдельными блоками - системы управления подразделяются на одно - и многоканальные.
- По способу изменения фазы управляющего импульса СИФУ подразделяются на горизонтальные, вертикальные и с цифровым управлением.
- По способу синхронизации с напряжением сети СИФУ бывают синхронные (Угол открытия тиристоров отсчитывается от напряжения определенной фазы сети) и асинхронные (отсчитывается от момента поступления предыдущего импульса управления).
- Электромагнитные, с использов0анием электромагнитных устройств, формирующих импульсы в момент перехода ферромагнитных материалов в насыщенное состояние. К таким системам можно отнести системы с пик-трансформаторами, пик-дросселями, импульсными насыщающимися трансформаторами на базе сердечников с резко выраженным коленом кривой намагничивания (ППГ), однополупериодными магнитными усилителями.
Такие системы выпускались в 80–е годы двадцатого столетия и до настоящего времени эксплуатируются в составе преобразователей технологического оборудования промышленных объектов. На рисунке 1.4 изображена схема классификации СИФУ для вентильных преобразователей.
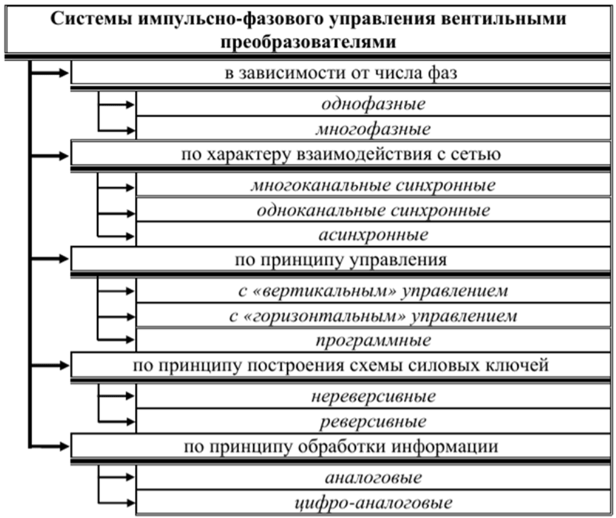
Рисунок 1.4 – Классификация импульсно фазового управления вентильными преобразователями
3.3 Принцип вертикального управления
Типовые СИФУ по принципу управления делятся на системы с вертикальным
и горизонтальным
управлением. При вертикальном принципе управления (рисунок 1.5) напряжение управления сравнивается с опорным переменным напряжением (синусоидальным, пилообразным и т.д.).
В момент времени, когда эти напряжения становятся равными и их разность изменяет полярность, происходит формирование импульса. Фазу импульса можно регулировать, изменяя величину постоянного напряжения управления.
Принцип вертикального
управления, применяемый в большинстве СИФУ. Из диаграмм видно, что опорное напряжение может быть, как пилообразным, так и синусоидальным (косинусоидальным) (рисунок 1.5).
Получить стабильное опорное пилообразное напряжение проще, т. к. оно может быть получено с помощью интегратора и дополнительного транзистора, разряжающего емкость при питании от источника стабильного постоянного напряжения.
Получить стабильное косинусоидальное напряжение, синхронизируемое сетью, трудно из-за колебаний напряжения сети и искажения его формы.
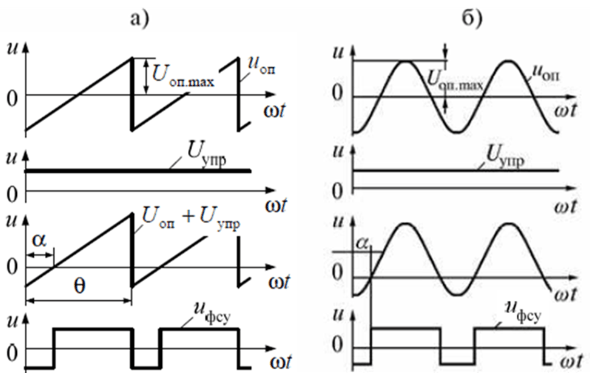
Рисунок 1.5 – Диаграммы напряжений пилообразное а) и косинусоидальное б)
В системах с вертикальным
управлением сигнал развертки (или входной сигнал) смещаются друг относительно друга в вертикальной плоскости, что изображено на рисунке 1.6.
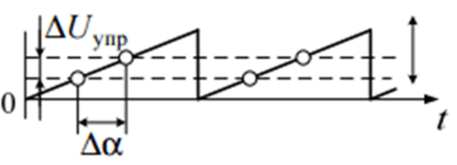
Рисунок 1.6 – Временные диаграммы сигналов при вертикальном
принципе управления СИФУ
4. Выводы
В данной работе была разработана и создана модель системы импульсно-фазового управления нереверсивным трехфазным выпрямителем, собранным в мостовую схему, в среде Matlab. После успешного моделирования, модель СИФУ была загружена в микроконтроллер платы STM32F4. Для проверки работоспособности СИФУ с ножек платы были сняты сигналы управления тиристорами. Импульсы соответствовали предъявленным к ним требованиям.
Список источников
- MATLAB Documentation – MathWorks: [Электронный ресурс]. Режим доступа: https://www.mathworks.com/(Дата обращения: 05.05.2017).
- User manual. STM32F4DISCOVERY [Электронный ресурс]. Режим доступа: http://www.st.com/ (Дата обращения: 05.05.2017).
- Системы управления ведомых преобразователей [Электронный ресурс]. Режим доступа: http://elprivod.nmu.org.ua/ (Дата обращения: 05.05.2017).
- Учебник для вузов
Силовая электроника
Ю.К. Розанов, М.В. Рябицкий, А.А. Кваснюк. - STM32 ST-LINK utility для программатора/отладчика ST-LINK/V2. [Электронный ресурс]. Режим доступа: http://firsthand.ru/ (Дата обращения: 10.05.2017).
- Схемное устройство для распознавания сетевых переходов через ноль [Электронный ресурс]. Режим доступа: http://www.freepatent.ru/(Дата обращения: 20.05.2017).
- Методы и устройства управления тиристорами. [Электронный ресурс]. Режим доступа: http://altay-krylov.ru/ (Дата обращения: 20.05.2017).