
Трехмерная графика
Трёхмерная графика – раздел компьютерной графики, посвящённый методам создания изображений или видео путём моделирования объёмных объектов в трёхмерном пространстве.
3D-моделирование – это процесс создания трёхмерной модели объекта. Задача 3D-моделирования - разработать визуальный объёмный образ желаемого объекта. При этом модель может как соответствовать объектам из реального мира (автомобили, здания, ураган, астероид), так и быть полностью абстрактной (проекция четырёхмерного фрактала).
Графическое изображение трёхмерных объектов отличается тем, что включает построение геометрической проекции трёхмерной модели сцены на плоскость (например, экран компьютера) с помощью специализированных программ. Однако с созданием и внедрением 3D–дисплеев и 3D–принтеров трёхмерная графика не обязательно включает в себя проецирование на плоскость.
Для получения трёхмерного изображения на плоскости требуются следующие шаги:
- моделирование – создание трёхмерной математической модели сцены и объектов в ней;
- текстурирование – назначение поверхностям моделей растровых или процедурных текстур (подразумевает также настройку свойств материалов – прозрачность, отражения, шероховатость и пр.);
- освещение – установка и настройка источников света;
- анимация (в некоторых случаях) – придание движения объектам;
- динамическая симуляция (в некоторых случаях) – автоматический расчёт взаимодействия частиц, твёрдых/мягких тел и пр. с моделируемыми силами гравитации, ветра, выталкивания и др., а также друг с другом;
- рендеринг (визуализация) – построение проекции в соответствии с выбранной физической моделью;
- композитинг (компоновка) – доработка изображения;
- вывод полученного изображения на устройство вывода – дисплей или специальный принтер.
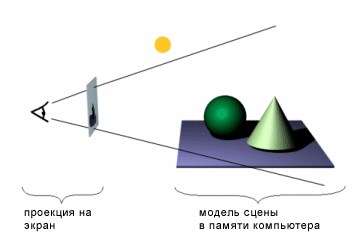
Рисунок 1 – Схема проецирования сцены на экран компьютера
Моделирование сцены (виртуального пространства моделирования) включает в себя несколько категорий объектов:
- Геометрия (построенная с помощью различных техник (напр., создание полигональной сетки) модель, например, здание);
- Материалы (информация о визуальных свойствах модели, например, цвет стен и отражающая/преломляющая способность окон);
- Источники света (настройки направления, мощности, спектра освещения);
- Виртуальные камеры (выбор точки и угла построения проекции);
- Силы и воздействия (настройки динамических искажений объектов, применяется в основном в анимации);
- Дополнительные эффекты (объекты, имитирующие атмосферные явления: свет в тумане, облака, пламя и пр.)
Задача трёхмерного моделирования – описать эти объекты и разместить их в сцене с помощью геометрических преобразований в соответствии с требованиями к будущему изображению.
Назначение материалов: для сенсора реальной фотокамеры материалы объектов реального мира отличаются по признаку того, как они отражают, пропускают и рассеивают свет; виртуальным материалам задается соответствие свойств реальных материалов – прозрачность, отражения, рассеивания света, шероховатость, рельеф и пр.
В свободное время я иногда занимаюсь тем, что создаю различные изображения, анимации или видео в програме Cinema4D.
Cinema 4D или сокращённо C4D фирмы MAXON является пакетом для создания трёхмерной графики и анимации.
Cinema 4D является универсальной комплексной программой для создания и редактирования трехмерных эффектов и объектов. Позволяет рендерить объекты по методу Гуро. Поддержка анимации и высококачественного рендеринга. Отличается более простым интерфейсом, чем у аналогов, и встроенной поддержкой русского языка, что делает её популярной среди русскоязычной аудитории.

Рисунок 2 – Интерфейс Cinema4D
Рассмотрим процесс создания данного изображения
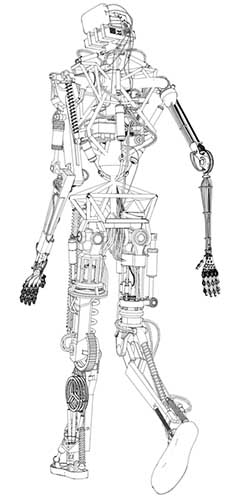
Рисунок 3 – Конечное изображение
Первым шагом является моделирование объектов. В нашем случае это робот. Вся модель робота была создано мной с нуля. Сперва была смоделирована правая рука робота. Это был мой первый опыт в моделировании подобного рода объектов и на это ушло много времени. Я старался продумать механику робота, что бы все подвижные части двигались так как им положено двигаться в реальном мире. То есть что бы при движении локтевого сустава было видно что и как приводит его в движение.
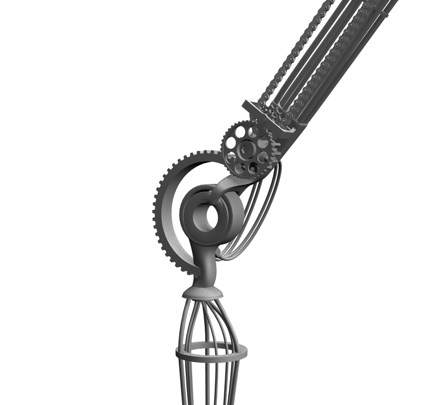
Рисунок 3 – Правый локтевой сустав
При моделировании кисти я так же старался уделить внимание механике. Можно заметиь механизмы которые приводят каждый палец в движение. Все это намеренно не спрятано от глаз.

Рисунок 4 – Правая кисть
При моделировании левой руки я уже учел свои ошибки. Также прошло некоторое количество времени и сои взгляды немного изменились. Поэтому видно разницу в стиле. Руки получились очень разными.

Рисунок 5 – Левая рука
Далее стояла работа по креплению этих рук к торсу. Торс выполнен в виде голого трубчатого каркаса. Все сделано дял того, что бы показать что внутри и как все устроено. Тут можно увидеть внутренности робота. Внутри видно аккамулятор, гидравлическую помпу и гидравлические клапана, которые распределяют жидкость на поршня.
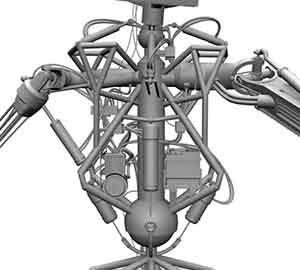
Рисунок 6 – Торс
После очередного достаточного длительного перерыва я принялся за моделирование ног. Здесь проблем уже не возникало, работа проходила без заминок. Мне показалось очень интересным сделать механизм движения левого колена в виде трех гидравлических цилиндров которые вращают коленвал. А коленвал в свою очередь приводит в движение шестерни колена. Конечно такакя схема в реальном мире не имела бы смысла по причине низкой эффективности, но все же работу свою выполняла. Да и при анимации выглядить очень любопытно.

Рисунок 7 – Ноги робота
В последнюю очередь нужно было смоделировать голову. Я посчитал интересным за основу взять зеркальную камеру. Конкретно эта модель фотоаппарата срисована с Sony a77. Рядом с камерой расположился промышленный дальномер. Коробка что видна ниже, это мозги робота, там происходят все вычисления. Благодаря видеокамере и дальномеру робот может видеть окружающий мир. Но это все только в моем воображении. В реальном мире камеры и дальномера будет критически недостаточно для коррдинации пряоходящего робота.

Рисунок 8 – Голова робота
После моделирования робота необходимо привязать его торс и конечности к виртуальным костям, с помочью которых осуществляется анимация. То есть не придеться предвигать каждую деталь по отдельности, достаточно просто двигать маркер конечности и она будет двигатся за ним.
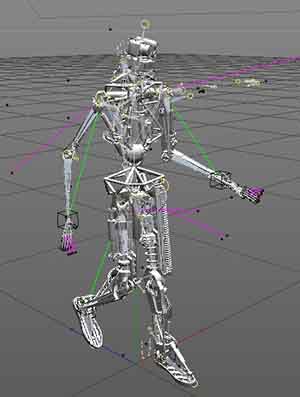
Рисунок 9 – Результат привязки робота к костям
Все, модель готова, мы можем двигать конечности и анимировать робота как только нам вздумается.
Для получения конечного изображения нам необходимо выставить нужную позу, выбрать ракурс камеры и настроить параметры рендера и изображение будет готово.
Данное увлечение мне очень помогает в жизни, так как развивает пространственное мышление и фантазию. Так же я улучшил знания английского языка, потому что большая чась обучающего материала на английском языке и приходиться выходить из ситуации.
Список источников
- Трёхмерная графика // wikipedia.org [Электронный ресурс]. – Режим доступа: https://wikipedia.org/..., свободный.
- Cinema 4D // wikipedia.org [Электронный ресурс]. – Режим доступа: https://wikipedia.org/..., свободный.