
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Процес рециркуляції мулу як об'єкта управління
- 2. Постановка мети і завдання дослідження
- 3. Огляд і аналіз відомих рішень з питання систем контролю та управління насосної станції рециркуляції активного мулу
- 4. Обгрунтування прийнятого напрямка вирішення завдання
- Висновки
- Перелік посилань
Вступ
Очисні споруди мулу – це складний комплекс інженерних споруд, пов'язаних технологічним процесом очищення стічних вод. Насосна станція рециркуляції активного мулу-являє собою групу групу насосних агрегатів, що виконують одну загальну поставлену задачу.
Головне призначення насосної станції рециркуляції активного мулу – безперервна перекачування активного мулу з радіальних відстійників в регенератори аеротенків, де відбувається регенерація активних властивостей мулу, тобто відновлення його окислювальної здатності. Надлишковий мул при цьому відбирається і надходить по напірному трубопроводі в преаератори і приймальні резервуари.
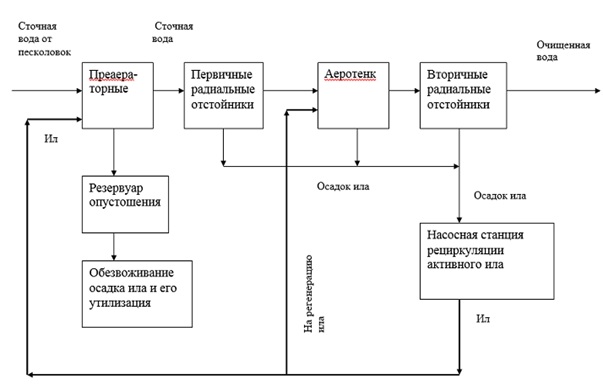
Малюнок 1 – Схема руху осаду при його обробці.
Як і будь-яка інша важлива система, вона вимагає економічно обґрунтованих технічних рішень на етапах її проектування та автоматизації.
1. Процес рециркуляції мулу як об'єкта управління
Більшість очисних споруд в наш час використовують застаріле обладнання, що позначається не тільки на надійності обладнання і систем, але і на технологічних процесах всього підприємства. Не стали винятком і насосні станції рециркуляції активного мулу, що працюють в штатному режимі, і не мають засобів регулювання процесів їх роботи.
Електропривод є энергосиловой основою сучасного виробництва і, в свою чергу, серед промислових електроприводів переважають електроприводи з асинхронними короткозамкненими двигунами, що споживають до 50% енергії, споживаної електроприводом. Ці електроприводи, завдяки своїй простоті і відносно невисокій вартості, знайшли широке застосування в різних механізмах. Загальновідомі і їх недоліки — важкий пуск при прямому підключенні до мережі, що супроводжується шести–семиразовими кратними струмами, і, як наслідок, невисока експлуатаційна надійність, складність регулювання швидкості. Завищений рівень споживання електроенергії є наслідком низького ККД насосних установок і станцій в цілому. З впровадженням у виробництво автоматичної системи управління технологічними процесами якісно змінюється форма і характер праці, підвищується безпека, кваліфікація та рівень знань робітників, стирається грань між фізичною і розумовою працею.
У переважній більшості випадків, електроприводи зазначених механізмів є нерегульованими, що не дозволяє забезпечити режим раціонального енергоспоживання і витрат при зміні технологічних потреб в широких межах. Вибрані, виходячи з максимальної продуктивності, ці механізми значну частину часу працюють з меншою продуктивністю, що визначається зміною потреби в різні періоди часу. У системах без автоматичного управління насосів рециркуляції активного мулу повністю відсутня можливість як-небудь впливати чи регулювати процес перекачування мулу. Після впровадження елементів САУ, з'являється можливість регулювати продуктивність насоса, враховуючи непостійну щільність перекачується мулу, тим самим слідувати заданим параметрам роботи і технологічних процесів.
2. Постановка мети і завдання дослідження
Мета створення системи управління насосною станцією – підвищення ефективності функціонування насосної станції, що дозволить продовжити термін служби технологічного обладнання, підвищити надійність і безпеку, а також зменшити експлуатаційні витрати на процес перекачки активного мулу і знизити енерговитрати. Основні функції, які повинна виконувати система автоматичного управління насосної станції:
1) функції управління:
— плавний пуск і зупинка насоса;
— автоматична зупинка насосів при порушенні їх роботи або згідно з технологічним процесом перекачування активного мулу;
2) автоматичний контроль основних технологічних параметрів насосної станції подачі, напору.
3) функція захисту:
— захист трубопроводу від надлишкового тиску;
— захист від кавітаційних явищ;
— захист від гідроударів.
4) інформаційні:
— збір інформації з датчиків і передача до керуючого контролера;
— сигналізація про непрацездатність системи; < /p>
— зв'язок керуючого контролера з диспетчерським пунктом для отримання і передачі даних.
Для реалізації обраних функцій, необхідно вирішити такі завдання:
1) завдання проектування – підібрати необхідні датчики, виконавчі механізми і контролер з потрібним класом точності і захисту для експлуатації у середовищі з підвищеною вологістю;
2) завдання для управління – домогтися швидкодії і високої чутливості системи;
3) інформаційне завдання & ndash; забезпечити безперервний двосторонній зв'язок об'єкта з диспетчерським пунктом.
3. Огляд і аналіз відомих рішень з питання систем контролю та управління насосної станції рециркуляції активного мулу
Один з основних способів автоматизації насосних станцій, це застосування Перетворювача частоти (ПЧ), представлений на малюнку 2.
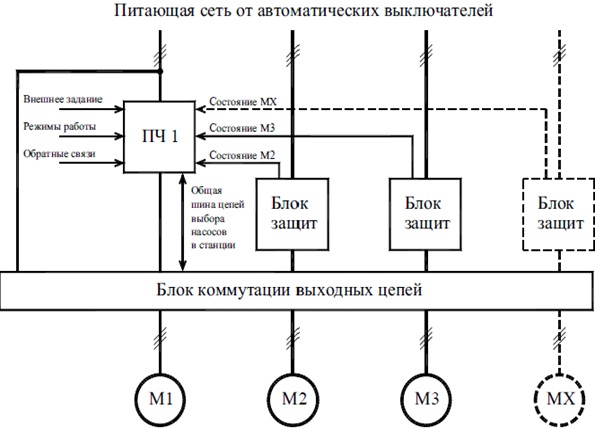
Малюнок 2 – Функціональна схема системи управління насосної станції з одним перетворювачем частоти.
Основна перевага даної схеми – це простота реалізації з найменшими витратами і можливість роботи станції в автоматичному режимі з прямими пусками на відкриту засувку. Головний недолік цієї системи – це менша надійність в порівнянні з іншими варіантами, за рахунок використання тільки одного регулюючого елемента. Найбільш популярна і бюджетна конфігурація систем нагадує попередню схему з додаванням в неї тиристорних пристроїв плавного пуску та зупинки електродвигунів підлеглих насосів. Це забезпечує їх ненаголошений запуск і останов на відкриту систему трубопроводів. Функціональна схема цієї конфігурації наведена на малюнку 2.1.
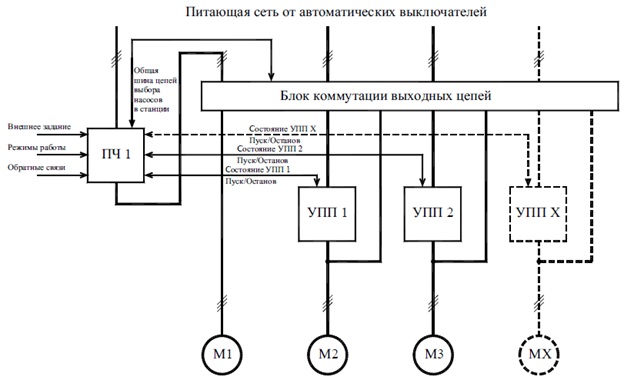
Малюнок 2.1 – Функціональна схема системи управління насосної станції з одним перетворювачем частоти і пристроями плавного пуску.
Слід виділити ще один варіант рішення, коли вихідні ланцюга перетворювача частоти можуть бути з'єднані з електродвигуном кожного підлеглого насоса через додаткові пускачі. Це дозволяє здійснювати перемикання частотного приводу на будь електродвигунів станції, що забезпечує безперебійну роботу системи при виході з ладу будь-якого насоса, а також зрівнює їх завантаження із збільшенням ресурсу всієї схеми. Серед недоліків цього рішення можна відзначити зростання кількості пускорегулюючої апаратури. Починаючи з потужності електродвигуна більше 90 кВт це мало виправдано і веде до збільшення витрат в обслуговуванні і експлуатації. Тому при одиничної потужності понад 110 кВт доцільна схема конфігурації системи управління станцією, коли на кожен електродвигун встановлюється свій перетворювач частоти. Функціональна схема такої системи управління насосною станцією наведена на малюнку 2.2.
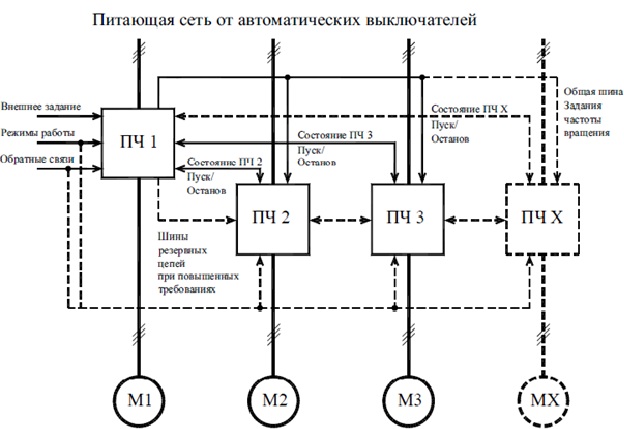
Малюнок 2.2 – Функциональная схема системы управления насосной станции с подчинёнными преобразователями частоты.
Ефект від однієї швидкості обертання всіх насосів може мати додатково до 10...12 % від загального внеску в енергозбереження. Причина полягає в тому, що відсутні втрати тиску у вихідному колекторі з-за різних швидкостей потоків середовища від насосів в групі. При цьому відбувається істотне зниження витрат на обслуговування та експлуатацію самої системи управління станцією. Можна забезпечити вибір будь-якого насоса в якості основного без громіздких схем комутації вихідних ланцюгів і в аварійних ситуаціях з вихідних ланцюгів перетворювача частоти залишити контур регулювання у роботі на інших насосах. Вибір частот, при яких проводиться плавний запуск, зупинку і регулювання швидкості електродвигунів підлеглих насосів проводиться по зонах максимального ККД насосів, з урахуванням допустимої кількості запусків в годину електродвигунів і допустимої зміни тиску в системі трубопроводів.
4.Обгрунтування прийнятого напрямка вирішення завдання
Для меншого енергоспоживання використовується метод управління, орієнтований не тільки на підтримку заданого тиску, але і на контроль ефективності роботи насосної станції. В якості критерію ефективності роботи насосної станції використовується її гідравлічний ККД, який визначається за формулою:
де p гідр – гідравлічна потужність, що розвивається насосною станцією, тобто потужність, передана рідини насосом;
Pc – сумарна електрична потужність, споживана приводами регульованих насосних
агрегатів і приводами насосів, що працюють від мережі.
Електрична потужність є вимірюваним параметром, гідравлічна (корисна потужність) визначається формулою:
де Q – подача насосної станції, м3/с;
ρ – щільність рідини, кг/м3;
g – прискорення вільного падіння, м/с2;
H – повний натиск насоса, м.
Повний напір насоса:
де Z – висота центру поперечного перерізу трубопроводу над площиною еталонної;
р – манометричний тиск, віднесений до центру поперечного перерізу;
u – середня осьова швидкість, яка визначається відношенням об'ємної подачі до площі поперечного перерізу труби.
Оскільки перетин трубопроводів на вході і виході насосного агрегату однакове, динамічної складової напору нехтують.
Зміна напору і потужності при регулюванні частоти обертання робочого колеса для відцентрових насосних агрегатів описується рівняннями, наведеними нижче. Напірна характеристика насоса:
де A2, B2, C2 – коефіцієнти, що визначаються характеристиками насосного агрегату;
n – частота обертання робочого колеса;
Q – витрата, що розвивається насосним агрегатом.
Визначається корисна потужність насосного агрегату, підставивши (4) в (2):
При цьому на затрачену насосом механічну потужність при зміні швидкості обертання істотний вплив роблять циркуляційні і механічні втрати в насосі. В загальному вигляді рівняння механічної потужності:
де A, B, D – коефіцієнти, що визначаються характеристиками насосного агрегату.
Для регульованого насоса споживана енергія буде визначатися формулою:
де ηдв, ηпч – ККД електродвигуна і перетворювача частоти.
Підставивши рівняння (5) – (7) в (1), отримуємо аналітичну залежність зміни ККД насоса від частоти обертання:
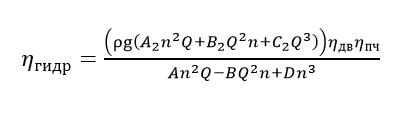
Для виключення неефективної роботи регульованих насосних агрегатів пропонується визначати миттєву ефективність кожного з них, а потім включати додатковий насосний агрегат в разі зниження ефективності нижче заданого порога. Миттєва ефективність оцінюється, виходячи з потужності, споживаної кожним з насосів, а також з його розвиваються напору і витрати. При цьому витрата оцінюється, виходячи з паспортної напірної характеристики насоса і поточної частоти обертання робочого колеса.
Висновки
В якості об'єкта управління розглянута насосна станція рециркуляції активного мулу. Були перераховані її особливості і деякі характеристики.
Насосна станція рециркуляції активного мулу була розглянута, як об'єкт регулювання. Розглянуто використання частотного перетворювача з метою знизити витрати на електроенергію. Також були розглянуті різні схеми регулювання і визначені їх переваги і недоліки. За вищевказаною інформацією були висунуті цілі і завдання автоматизації розробки, а також було визначено вимоги користувача до системи управління. Було пояснено вибір напрямку рішення автоматизації.
Перелік посилань
- Сайт Оборудования для автоматизации компании «ОВЕН» [Электронный ресурс]. / – Режим доступа: http://www.owen.ru/.
- Тимошенко Г.М. Научные основы проектирования и эксплуатации насосных установок в переходных режимах. / Тимошенко Г.М. – Киев; Донецк: Вища шк. Головное изд-во, 1986.–127 с.
- Башарин А.В. Управление электроприводами: Учебное пособие для вузов. / Башарин А.В., Новиков В.А., Соколовский Г.Г. – Л.: Энергоиздат. Ленинградское отделение, 1982.–392 с.
- Денисенко В. В. ПИД–регуляторы вопросы реализации часть 2 / Денисенко В. В. – М.: СТА 2008. № 1. с 86-99
- Густав Олсон, Джангуидо Пиани Цифровые системы автоматизации и управления. Санкт–Петербург, 2001.- 557 с.
- Зайцев Г.Ф. Теория автоматического управления и регулирования. / Зайцев Г.Ф. – Киев: Вища школа, 1988 – 431 с.
- Лукас В. А. Теория автоматического управления. / Лукас В. А. – М.: Недра, 1990. – 416 с.
- Дорф Р., Бишоп Р. Современные системы управления. / Р. Дорф, Р. Бишоп – М.: Лаборатория Базовых знаний.– 2002 – 832 с.
- Гаврилов П.Д. Автоматизация производственных процессов. Учебник для вузов. / Гаврилов П.Д., Гимельштейн Л.Я., Медведев А.Е. – М.: Недра, 1985. – 215 с.
- Перельмутер В.М. Пакеты расширения MATLAB. Control System Toolbox & Robust Control Toolbox / Перельмутер В.М. – М.: СОЛОН-ПРЕСС, 2008. – 224 с.