
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи
- 3. Обзор подходов к планированию траектории перемещения автономных подвижных объектов
- 3.1 Устройство нейро–нечётких сетей
- 3.2 Генетический алгоритм
- 3.3 Потенциальные поля
- 4. Метод нечеткой логики
- 5. Виды и анализ датчиков измерения расстояния
- 5.1 ИК датчик расстояния
- 5.2 Лазерные датчики расстояния
- 5.3 Ультразвуковые датчики расстояния
- 6. Разработка структурной схемы устройства
- 6.1 Обоснование температурной зависимости
- 6.2 Структурная схема устройства
- Выводы
- Список источников
Введение
Роботы – автоматические системы, предназначенные для воспроизведения двигательных и интеллектуальных функций человека. От традиционных автоматов отличаются большей универсальностью и способностью адаптации на выполнение различных задач, в том числе в изменяющейся обстановке. В настоящее время робототехника превратилась в развитую отрасль промышленности: тысячи роботов работают на различных предприятиях мира, подводные манипуляторы стали непременной принадлежностью подводных исследовательских и спасательных аппаратов, изучение космоса опирается на широкое использование роботов с различным уровнем интеллекта. Особенное внимание уделяется автоматизации тяжелых, вредных, утомительных и монотонных работ в различных отраслях с помощью роботов–манипуляторов. Современные робототехнические системы представляют собой совокупность последних достижений науки, техники, а их универсальность позволяет применять их для решения самых разнообразных задач. Одним из важнейших классов роботов широкого назначения являются мобильные роботы.
Мобильный робот может осуществлять свою деятельность, как под управлением человека–оператора, так и автономно. Наделение мобильного робота автономностью требует решения ряда технически сложных задач на первом месте, из которых стоит планирование траектории перемещения. Для автономного универсального робота проблемы ориентации и перемещения в окружающем пространстве являются одними из ключевых. Робот должен не имитировать разумное поведение, а по–настоящему быть разумным. Он должен осознавать – где он находится, каковы особенности данного места и как из точки А
, при необходимости, можно попасть в точку Б
за минимальное время или покрыв минимальное расстояние.
Наличие продвинутой системы ориентации, позволит роботу планировать свои действия по перемещению в пространстве, просчитывать оптимальный маршрут движения, собирать и использовать информацию об окружающих местность препятствиях, что в конечном итоге, позволит ему выполнять полезную функциональную нагрузку [1].
1. Актуальность темы
В настоящее время существует множество систем включающих в себя датчики расстояния, а так же другие органы чувств
автономных систем. Однако для некоторых ситуаций не требуется сложной системы, которая могла бы к примеру запоминать местоположение объектов, либо GPS ориентированию. Именно в данных случаях лучше всего подойдет бюджетная система состоящая из минимума аппаратных средств.
Для того, чтобы лучше погрузиться в предметную область и придумать хороший (быстрый и точный) алгоритм идентификации своего положения в пространстве для робота с одним сенсором, необходимо попытаться увидеть мир его глазами. Этот мир очень специфический. Его можно представить так :
– Робот с контактным сенсором – человек в темной комнате с завязанными руками (без рук). Он идет пока не ударится о стену. Может следовать вдоль препятствия, периодически о него ударяясь.
– Робот с сенсором расстояния небольшой дальности – человек в темной комнате с развязанными руками. Он может двигаться, не сталкиваясь с препятствиями и узнавать о характере препятствий вокруг себя на расстоянии вытянутой руки.
– Робот с дальнобойным сенсором расстояния – человек в темной комнате с фонариком (лазерной указкой). Он может оценивать расстояние до противоположных стен, оставаясь на месте.
Исходя из вышесказанного можно сделать вывод, что для организации автономной робототехнической системы требуется исполнительные элементы, микропроцессорное устройство и датчик расстояния (сонар), так как он полностью удовлетворяет все условия автономного передвижения, благодаря обнаружению препятствий на требуемом расстоянии.
2. Цель и задачи
Цель – разработать электронное устройство для измерения расстояния до препятствий подвижных объектов.
Назначением разработки является определение расстояния до объекта ультразвуковым методом с коррекцией значения по температуре.
Основные задачи:
- Устройство должно быть устойчивым к внешним воздействиям окружающей среды.
- ЭУИР должно быть технологично в изготовлении и содержать максимум стандартных и унифицированных деталей.
- Устройство должно быть рассчитано на работу в диапазоне температур от –30 oС до +60 oС окружающей среды при влажности воздуха до 80% и атмосферное давление от 64 до 106 кПа.
- Для корпуса должны быть выбраны доступны, дешевы и некоррозийнные материалы.
- Устройство должно быть устойчиво к транспортировке по автомобильным дорогам.
3. Обзор подходов к планированию траектории перемещения автономных подвижных объектов
3.1 Устройство нейро-нечётких сетей
Нервная система состоит из центральной нервной системы и перефирийной нервной системы. Центральная нервная система состоит из головного мозга и из спинного мозга. Центральная нервная система oбразуется из нервных клеток, называемых нейронами.
Нейрон состоит из составляющих:
– дендриты – предназначены для принятия импульсов.
– аксон – предназначены для передачи импульсов.
– синапсы – это специфические образования на дендритах и аксонах (места соединения с другими дендритами).
Искусственная нейронная сеть (ИНС) – это упрощенная модель биологического мозга, точнее нервной ткани. Естественная нервная клетка (нейрон) состоит из тела (сомы), содержащего ядро, и отростков–дендритов, по которым в нейрон поступают входные сигналы. Один из отростков, ветвящийся на конце, служит для передачи выходных сигналов данного нейрона другим нервным клеткам. Он называется аксоном. Соединение аксона с дендритом другого нейрона называется синапсом. Нейрон возбуждается и передает сигнал через аксон, если число пришедших по дендритам возбуждающих сигналов больше, чем число тормозящих.
Сеть искусственных нейронных сетей представляет собой совокупность простых вычислительных элементов – искусственных нейронов, каждый из которых обладает определенным количеством входов (дендритов) и единственным выходом (аксоном), разветвления которого подходят к синапсам, связывающим его с другими нейронами. На входы нейрона поступает информация извне или от других нейронов. Каждый нейрон характеризуется функцией преобразования входных сигналов в выходной (функция возбуждения нейрона). Нейроны в сети могут иметь одинаковые или разные функции возбуждения. Сигналы, поступающие на вход нейрона, неравнозначны в том смысле, что информация из одного источника может быть более важной, чем из другого. Приоритеты входов задаются с помощью вектора весовых коэффициентов, моделирующих синаптическую силу биологических нейронов.
Модель искусственного нейрона представляет собой дискретно–непрерывный преобразователь информации. Информация, поступающая на вход нейрона, суммируется с учетом весовых коэффициентов сигналов i=1,…, n, где n – размерность пространства входных сигналов [2].
3.2 Генетический алгоритм
Генетический алгоритм – это эвристический алгоритм поиска, используемый для решения задач оптимизации и моделирования путём случайного подбора, комбинирования и вариации искомых параметров с использованием механизмов, аналогичных естественному отбору в природе. Является разновидностью эволюционных вычислений, с помощью которых решаются оптимизационные задачи с использованием методов естественной эволюции, таких как наследование, мутации, отбор и кроссинговер. Отличительной особенностью генетического алгоритма является акцент на использование оператора скрещивания
, который производит операцию рекомбинации решений–кандидатов, роль которой аналогична роли скрещивания в живой природе.
Задача формализуется таким образом, чтобы её решение могло быть закодировано в виде вектора (генотипа
) генов, где каждый ген может быть битом, числом или неким другим объектом. В классических реализациях генетического алгоритма (ГА) предполагается, что генотип имеет фиксированную длину. Однако существуют вариации ГА, свободные от этого ограничения.
Некоторым, обычно случайным, образом создаётся множество генотипов начальной популяции. Они оцениваются с использованием функции приспособленности
, в результате чего с каждым генотипом ассоциируется определённое значение (приспособленность
), которое определяет насколько хорошо фенотип, им описываемый, решает поставленную задачу.При выборе функции приспособленности
(или fitness function в англоязычной литературе) важно следить, чтобы её рельеф
был гладким
.
Из полученного множества решений (поколения
) с учётом значения приспособленности
выбираются решения (обычно лучшие особи имеют большую вероятность быть выбранными), к которым применяются генетические операторы
(в большинстве случаев скрещивание
– crossover и мутация
– mutation), результатом чего является получение новых решений. Для них также вычисляется значение приспособленности, и затем производится отбор (селекция
) лучших решений в следующее поколение.
Этот набор действий повторяется итеративно, так моделируется эволюционный процесс
, продолжающийся несколько жизненных циклов (поколений), пока не будет выполнен критерий остановки алгоритма. Таким критерием может быть:
– нахождение глобального, либо субоптимального решения;
– исчерпание числа поколений, отпущенных на эволюцию;
– исчерпание времени, отпущенного на эволюцию.
3.3 Потенциальные поля
Суть метода метода потенциальных полей заключается в том, что каждое препятствие имеет вокруг себя отталкивающее потенциальное поле, сила которого обратно пропорциональна расстоянию до него; так же существует однородная сила притяжения к цели. Через короткие постоянные интервалы времени вычисляется сумма притягивающих и отталкивающих векторов и объект передвигается в этом направлении.
Преимущества и недостатки:
Метод потенциальных известен достаточно давно и хорошо исследован. Это один из самых простых и эффективных алгоритмов навигации. В качестве методики определения векторов сопротивления используются достаточно простые формулы из физики. Они рассчитываются только по показаниям сенсоров в текущий момент времени, то есть если робот не видит препятствие, то и сопротивления оно не оказывает. Даже если в памяти робота (на карте) это препятствие присутствует[5].
Недостатки этого метода вытекают из его достоинств. Этот алгоритм навигации хоть и позволяет достигать цель является реактивным
, а не интеллектуальным. Локальность алгоритма часто делает его близоруким
и неэффективным для достижения сложных целей. Так, он часто критикуется за высокую вероятность попадания агента в локальный минимум. Однако, на практике, эта вероятность весьма мала и может быть значительно уменьшена
за счет дополнительных, высокоуровневых улучшений.
Детальное исследование показало что метод потенциальных полей способен провести робота в любую точку смоделированной окружающей среды. Причём самый главный недостаток метода потенциальных полей – попадание в локальные минимумы встречается настолько редко, по сравнению с временем нормальной работы алгоритма. Таким образом, метод потенциальных полей является достаточно эффективной реализацией простейшей реализацией навигационной системы робота, так и компонентом более сложной навигационной системы. Создание начальной популяции
Перед первым шагом нужно случайным образом создать начальную популяцию; даже если она окажется совершенно неконкурентоспособной, вероятно, что генетический алгоритм всё равно достаточно быстро переведёт её в жизнеспособную популяцию. Таким образом, на первом шаге можно особенно не стараться сделать слишком уж приспособленных особей, достаточно, чтобы они соответствовали формату особей популяции, и на них можно было подсчитать функцию приспособленности (Fitness). Итогом первого шага является популяция H, состоящая из N особей.
На этапе отбора нужно из всей популяции выбрать определённую её долю, которая останется в живых
на этом этапе эволюции. Есть разные способы проводить отбор. Вероятность выживания особи h должна зависеть от значения функции приспособленности Fitness(h). Сама доля выживших s обычно является параметром генетического алгоритма, и её просто задают заранее. По итогам отбора из N особей популяции H должны остаться sN особей, которые войдут в итоговую популяцию H. Остальные особи погибают.
– Турнирная селекция – сначала случайно выбирается установленное количество особей (обычно две), а затем из них выбирается особь с лучшим значением функции приспособленности
– Равномерное ранжирование – вероятность выбора особи определяется выражением
– Сигма отсечение – для предотвращения преждевременной сходимости генетического алгоритма используются методы, масштабирующие значение целевой функции. Вероятность выбор особи тем больше, чем оптимальнее значение масштабируемой целевой функции – среднее значение целевой функции для всей популяции, среднеквадратичное отклонение значения целевой функции [8].
4. Метод нечеткой логики
Каждый из перечисленных методов имеет свои особенности практического использования. Но часто для организации такого вида робототехнического контроля, у заказчика не хватает финансовых средств, по этому одним из более дешевых, но не менее эффективных методов планирования движения является метод нечеткой логики
. Основным принципом данного метода является база правил действий выбор которых осуществляется логикой If, else, then
. Именно этот метод предлагается к рассмотрению. С помощью данных операторов выбирается то или иное правило к действию, что обуславливает дальнейшее движение робототехнической системы. Поведение подвижного объекта представляет собой множество отдельных поведений, причем выбор определенного напрямую зависит от состояния окружающей среды. Таким образом можно подытожить, что для ориентации подвижной платформы в пространстве, необходим хотя бы один орган чувств
, а именно датчик расстояния. С помощью его можно достаточно точно определять расстояние до объекта, что позволяет минимальному ориентированию платформы в пространстве. Данное решение имеет ряд преимуществ, и одно из них– это сравнительно низкая цена организации автоматической системы.
В настоящее время существует множество систем включающих в себя датчики расстояния, а так же другие органы чувств
автономных систем. Однако для некоторых ситуаций не требуется сложной системы, которая могла бы к примеру запоминать местоположение объектов, либо GPS ориентированию. Именно в данных случаях лучше всего подойдет бюджетная система состоящая из минимума аппаратных средств.
4. Виды и анализ датчиков измерения расстояния
Датчики расстояния информируют о состоянии внешней среды посредством взаимодействия с ней и преобразования реакции на это взаимодействие в измерительные сигналы. Существует множество явлений и эффектов, видов преобразования сигналов и параметров, которые можно использовать для создания датчиков. При классификации датчиков в качестве основного критерия используется принцип их действия, который, в свою очередь, базируется на определённых физических или химических явлениях и свойствах.
Фактически работа датчиков расстояния сводится к тому, что прибор посылает сигнал (лазерный луч, ультразвуковое излучение, ИК–луч или магнитный и реагирует на его отражение от тела, тем самым зная скорость распространения звука в упругой среде засекает разницу времени прохождения сигнала от излучения до приема.
На данный момент на отечественном рынке специального оборудования можно приобрести различные виды датчиков необходимых для измерения расстояния. Наиболее популярными являются следующие разновидности датчиков:
– ИК датчик расстояния – этот вариант устройства использует для определения расстояния инфракрасный луч;
– оптические датчики расстояния – что касается оптических датчиков, то по уверению специалистов этот прибор имеет весьма широкий диапазон, который варьируется в промежутке от 1 мм до 30 м;
– индуктивные датчики расстояния – этот тип устройства необходим для того, чтобы замерять габаритные размеры предметов, выполненных из металла, а также для того, чтобы определять их форму.
– ультразвуковой датчик измерения расстояния – чтобы получить данные относительно расстояния используется ультразвуковой луч, который свободно огибает любые незначительные преграды и предметы.
5.1 ИК датчик расстояния
Рисунок 1 – Инфракрасный датчик расстояния
Практически любой объект испускает различное тепловое излучение, которое фиксируется инфракрасными датчиками движения. С помощью специальной системы линз и особых зеркал ИК излучение объектов попадает на центральный сенсор датчика. При движении объектов происходит изменение в этих системах инфракрасного излучения, что приводит к реакции датчика. Качество фиксирования движения ИК датчиками напрямую зависит от количества расположенных в них систем линз и зеркал [4].
Основные недостатки инфракрасных датчиков движения:
– вероятность ложных срабатываний данного вида датчиков (воздействие любого потока теплого воздуха);
– низкая точность реакции датчика на открытом пространстве (воздействие осадков или солнечного света);
– невысокий диапазон рабочих температур;
– неспособность реакции на объекты, которые не пропускают ИК излучение.
Плюсы инфракрасных датчиков движения:
– огромная дальность фиксирования движения, а также регулировка нужного ула захвата зоны контроля;
– реагирование датчиков исключительно на объекты с собственной температурой;
– гарантированная безопасность ИК датчиков для здоровья людей и животных (датчики не испускают излучения).
- ГОСТ 12.1.001–89 Ультразвук. Общие требования безопасности.
- Шайдуров В.В. Непомнящий О.В. Вейсов Е.А. Математика, механика, информатика. Построение математической модели преобразователя ультразвукового сигнала с целью практической реализации микропроцессорной системы сканирования высокотемпературных изделий.
- Васильев Е.Н. Деревьянко В.В. Программный комплекс для расчета температурных полей.
- Сенько В.Ф. Энергетическая электроника: Учебное пособие/ В.Ф. Сенько, А.В. Вовна, А.А. Зори. – Донецк: ДВУЗ
ДонНТУ
, 2014. – 312 с. - Жданкин В.К. Приборы для измерения уровня/ Cовременные технологии автоматизации. – 2002 – № 3.
- Источники электропитания радиоэлектронной аппаратуры: Справочник/ Под ред. Г.С. Найвельта. – М.: Радио и связь, 1986. – 576 с..
- Коломбет Е.А., Юркович К., Зодл Я. Применение аналоговых микросхем. – М.: Радио и связь, 1990.– 320 с.
- Гутников В.С. Интегральная электроника в измерительных устройствах/ В.С. Гутников. – М.: Радио и связь, 1988. – 256 с.
- Изъюрова Г. И. Расчет электронных схем/ Г. И. Изъюрова. – М.: Высшая школа, 1987. – 153 с, 194 с.
- Матвеев А.Н. электричество и магнетизм. Учебное пособие – М.: высшая школа, 1983 – 463 с.
5.2 Лазерные датчики

Рисунок 2 – Лазерный датчик расстояния
Если речь заходит о лазерном датчике, то по мнению опытных специалистов следует отдавать предпочтение следующим вариантам исполнения:
– лазерный датчик расстояния Аrduino – этот прибор зарекомендовал себя на отечественном рынке как один из самых надежных и качественных.
– лазерные датчики расстояния высокой точности – в этом случае для замера расстояния используется лазерный луч. В процессе измерения можно задать разрешение: от 0,01 мм до 0,1 мм.
– лазерные датчики расстояния фазового типа – такой прибор измеряет расстояние и форму предмета при получении фазовой разности между фазой отклика и фазой возврата. Использование датчиков этого типа существенно упрощает работу специалиста и делает ее в несколько раз удобнее.
5.3 Ультразвуковые датчики

Рисунок 3 – Ультразвуковой датчик расстояния
Ультразвуковые колебания (УЗК) создают в воздухе, являющемся упругой средой, движущиеся волны давления с диапазоном частот свыше 20 кГц; в иных средах ультразвуковые волны распространяются с другими частотами. Способность УЗК распространяться в различных средах используется в системах неразрушающего контроля, эхолотах, уровнемерах, ультразвуковых медицинских диагностических установках, датчиках приближения систем автоматизации производственных процессов и т.д.
В том случае, если предпочтение было отдано датчику, необходимому для измерения расстояния, ультразвукового типа, то стоит выбирать из трех следующих вариантов:
– ультразвуковой датчик измерения расстояния НС sr04 – изделие имеет разрешение от 2см до 400 см. предназначено для замера крупногабаритных объектов.
– ультразвуковые датчики расстояния Промситех – один из самых популярных вариантов на территории РФ. По статистике, его выбирает примерно 67% всего населения.
Основным принципом действия данного вида датчиков является исследование системы контроля с помощью ультразвука, частота которого недоступна для человеческих ушей. Ультразвук посылается на всю область подконтрольную датчику, а затем он возвращается обратно. Происходит расчет времени между моментом посылки сигнала и моментом приема отраженного сигнала. В случае искажения информации об объектах срабатывает определенная функция датчика [1].
6. Разработка структурной схемы устройства
6.1 Обоснование температурной зависимости
Рисунок 4 – Ультразвуковой дальномер
За счет единой формулы запрограммированной в памяти микроконтроллера, с изменением температуры начинает появляться температурная погрешность измерений, которая прямо пропорционально увеличивается с большим отклонением температуры от номинального значения. Для коррекции данного температурного фактора в структурную схему устройства введен измерительный канал температурной, который состоит из датчика температуры, измерительного моста, усилителя и приводит амплитуду принятого сигнал ко входному формату аналого–цифрового преобразователя, согласующего входной сигнал с цифровым входом микроконтроллера. По результатам измерения температуры микроконтроллер вводит коррекцию в результат измерения с помощью заведомо запрограммированных формул расчета температурной коррекции.
На данном графике наглядно представлено отклонение показаний ультразвукового датчика в зависимости от температуры.
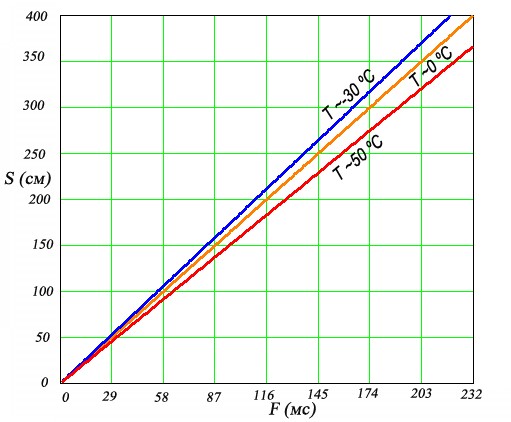
Рисунок 5 – Зависимость измерений от темпреатуры
6.2 Структурная схема устройства
Исходя из выше приведенных фактов была разработано структурная схема электронного устройства в которой был введен канал измерения температуры. С помощью данного канала в стандартную формулу расчета расстояния вводится поправочный коэффициент, который практически убирает температурную погрешность ультразвукового измерения. Далее микроконтроллер действует по предписанному алгоритму и передает соответствующие команды либо на блок индикации, если таковой имеется, либо на блок согласования с исполнительным механизмом который приводит в действие или изменяет состояние силовых агрегатов платформы.
Ниже приведена структурная схема электронного устройства измерения расстояния.
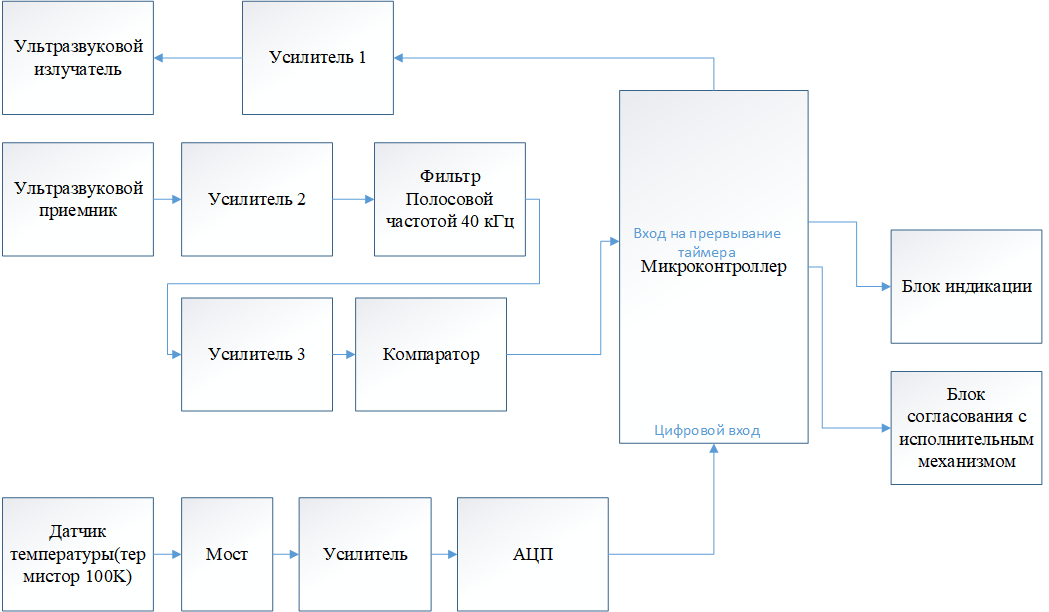
Рисунок 6 – Струтурная схема электронного устройства измерения расстояния
Выводы
В ходе проведения дипломной работы был проведен анализ существующих методов измерения расстояния, выбран найболее подходящий, а именно ультразвуковой метод измерения расстояния. Однако проведя расчеты в различных температурных условиях был выявлен дефект данного метода, после чего был введен дополнительный канал измерения температуры окружающей среды для введения поправочного коэффициента. В результате, можно сказать что устройство в разы превышает точность измерения расстояния до препятствий подвижных объектов по сравнению со своим прототипом. Данное повышение точности измерений было достигнуто благодаря вводу в устройство канала измерения температуры, и коррекция формулы вычисления расстояния до препятствий. В итоге устройство обладает всеми необходимыми характеристиками для использования в различных температурных условиях.
Магистерская работа посвящена разработке устройства ориентирования и определения расстояния до препятствий подвижных объектов, в различных погодных, а так же температурных условиях.
Исходя из выбранных метода и прототипа, была разработана структурная схема измерительной системы.