
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і завдання
- 3. Огляд підходів до планування траєкторії переміщення автономних рухомих об'єктів
- 3.1 Пристрій нейро-нечітких мереж
- 3.2 Генетичний алгоритм
- 3.3 Потенційні поля
- 4. Метод нечіткої логіки
- 5. Види і аналіз датчиків вимірювання відстані
- 5.1 ІЧ датчик відстані
- 5.2 Лазерні датчики відстані
- 5.3 Ультразвукові датчики відстані
- 6. Розробка структурної схеми пристрою
- 6.1 Обґрунтування температурної залежності
- 6.2 Структурна схема пристрою
- Висновки
- Список джерел
Вступ
Роботи – автоматичні системи, призначені для відтворення рухових і інтелектуальних функцій людини. Від традиційних автоматів відрізняються більшою універсальністю і здатністю адаптації на виконання різних завдань, в тому числі в мінливій обстановці. В даний час робототехніка перетворилася на розвинену галузь промисловості: тисячі роботів працюють на різних підприємствах світу, підводні маніпулятори стали неодмінною приналежністю підводних дослідницьких і рятувальних апаратів, вивчення космосу спирається на широке використання роботів з різним рівнем інтелекту. Особлива увага приділяється автоматизації важких, шкідливих, важких і монотонних робіт в різних галузях за допомогою роботів-маніпуляторів. Сучасні робототехнічні системи являють собою сукупність останніх досягнень науки, техніки, а їх універсальність дозволяє застосовувати їх для вирішення найрізноманітніших завдань. Одним з найважливіших класів роботів широкого призначення є мобільні роботи.
Мобільний робот може здійснювати свою діяльність, як під управлінням людини-оператора, так і автономно. Наділення мобільного робота автономністю вимагає вирішення ряду технічно складних завдань на першому місці з яких стоїть планування траєкторії переміщення. Для автономного універсального робота проблеми орієнтації і переміщення в навколишньому просторі є одними з ключових. Робот повинен не імітувати розумну поведінку, а по-справжньому бути розумним. Він повинен усвідомлювати – де він знаходиться, які особливості даного місця і як з точки "А", при необхідності, можна потрапити в точку "Б" за мінімальний час або покривши мінімальна відстань.
Наявність просунутої системи орієнтації, дозволить роботу планувати свої дії з переміщення в просторі, прораховувати оптимальний маршрут руху, збирати та використовувати інформацію про оточуючих місцевість перешкоди, що в кінцевому підсумку, дозволить йому виконувати корисну функціональне навантаження.
1. Актуальність теми
В даний час існує безліч систем включають в себе датчики відстані, а так само інші «органи почуттів» автономних систем. Однак для деяких ситуацій не потрібно складної системи, яка могла б наприклад запам'ятовувати розташування об'єктів, або GPS орієнтування. Саме в даних випадках найкраще підійде бюджетна система складається з мінімуму апаратних засобів.
Для того, щоб краще зануритися в предметну область і придумати хороший (швидкий і точний) алгоритм ідентифікації свого положення в просторі для робота з одним сенсором, необхідно спробувати побачити світ його очима. Цей світ дуже специфічний. Його можна уявити так:
– Робот з контактним сенсором – людина в темній кімнаті з зав'язаними руками (без рук). Він йде поки не вдариться об стіну. Може слідувати уздовж перешкоди, періодично про нього вдаряючись.
– Робот з сенсором відстані невеликої дальності – людина в темній кімнаті з розв'язаними руками. Він може рухатися, не стикаючись з перешкодами і дізнаватися про характер перешкод навколо себе на відстані витягнутої руки.
– Робот з далекобійним сенсором відстані – людина в темній кімнаті з ліхтариком (лазерною указкою). Він може оцінювати відстань до протилежних стін, залишаючись на місці.
Виходячи з вищесказаного можна зробити висновок, що для організації автономної робототехнічної системи потрібно виконавчі елементи, мікропроцесорний пристрій і датчик відстані (сонар), так як він цілком задовольняє всі умови автономного пересування, завдяки виявленню перешкод на необхідному відстані.
2. Мета і завдання
Мета – розробити електронний пристрій для вимірювання відстані до перешкод рухомих об'єктів.
Призначенням розробки є визначення відстані до об'єкта ультразвуковим методом з корекцією значення по температурі.
основні завдання:
- Пристрій повинен бути стійким до зовнішніх впливів навколишнього середовища.
- ЭУИР має бути технологічно у виготовленні і містити максимум стандартних і уніфікованих деталей.
- Пристрій повинен бути розрахований на роботу в діапазоні температур від -30 oС до +60 oЗ навколишнього середовища при вологості повітря до 80% і атмосферний тиск від 64 до 106 кПа.
- для корпусу повинні бути обрані доступні, дешеві і некоррозійні матеріали.
- пристрій повинен бути стійким до транспортування автомобільними дорогами.
3. Огляд підходів до планування траєкторії переміщення автономних рухомих об'єктів
3.1 Пристрій нейро-нечітких мереж
Нервова система складається з центральної нервової системи та перефірійної нервової системи. Центральна нервова система складається з головного мозку і з спинного мозку. Центральна нервова система утворюється з нервових клітин, званих нейронами.
Нейрон складається зі складових:
– дендрити – призначені для прийняття імпульсів.
– аксон – призначені для передачі імпульсів.
– синапси – це специфічні освіти на дендритах і аксонах (місця з'єднання з іншими дендритами).
Штучна нейронна мережа (ІНС) – це спрощена модель біологічного мозку, точніше нервової тканини. Природна нервова клітина (нейрон) складається із тіла (соми), що містить ядро, і відростків-дендритів, за якими в нейрон надходять вхідні сигнали. Один з відростків, розгалужених на кінці, служить для передачі вихідних сигналів даного нейрона іншим нервовим клітинам. Він називається аксоном. З'єднання аксона з дендритом іншого нейрона називається синапсом. Нейрон збуджується і передає сигнал через аксон, якщо число прийшли за дендрита збуджуючих сигналів більше, ніж число гальмують.
Мережа штучних нейронних мереж являє собою сукупність простих обчислювальних елементів – штучних нейронів, кожен з яких володіє певною кількістю входів (дендритів) і єдиним виходом (аксоном), розгалуження якого підходять до синапсах, що зв'язує його з іншими нейронами. На входи нейрона надходить інформація ззовні або від інших нейронів. Кожен нейрон характеризується функцією перетворення вхідних сигналів у вихідний (функція збудження нейрона). Нейрони в мережі можуть мати однакові або різні функції збудження. Сигнали, що надходять на вхід нейрона, нерівнозначні в тому сенсі, що інформація з одного джерела може бути більш важливою, ніж з іншого. Пріоритети входів задаються за допомогою вектора вагових коефіцієнтів, що моделюють синаптичну силу біологічних нейронів.
Модель штучного нейрона являє собою дискретно-безперервний перетворювач інформації. Інформація, що надходить на вхід нейрона, підсумовується з урахуванням вагових коефіцієнтів сигналів i=1,..., n, де n – розмірність простору вхідних сигналів.
3.2 Генетичний алгоритм
Генетичний алгоритм – це евристичний алгоритм пошуку, використовуваний для рішення задач оптимізації і моделювання шляхом випадкового підбору, комбінування і варіації шуканих параметрів з використанням механізмів, аналогічних природного добору в природі. Є різновидом еволюційних обчислень, за допомогою яких вирішуються оптимізаційні задачі з використанням методів природної еволюції, таких як спадкування, мутації, відбір та кросинговер. Відмінною особливістю генетичного алгоритму є акцент на використання оператора «схрещування», який проводить операцію рекомбінації рішень-кандидатів, роль якої аналогічна ролі схрещування в живій природі.
Завдання формалізується таким чином, щоб її рішення могло бути закодоване у вигляді вектора (генотипу
) генів, де кожен ген може бути бітом, числом або якимсь іншим об'єктом. У класичних реалізаціях генетичного алгоритму (ГА) передбачається, що генотип має фіксовану довжину. Однак існують варіації ГА, вільні від цього обмеження.
Деяким, зазвичай випадковим, чином створюється безліч генотипів початкової популяції. Вони оцінюються з використанням функції пристосованості
, в результаті чого з кожним генотипом асоціюється певне значення («пристосованість»), яке визначає, наскільки добре фенотип, їм описуваний, вирішує поставлене завдання.При виборі функції пристосованості» (або fitness function в англомовній літературі) важливо стежити, щоб її «рельєф» був «гладким».
З отриманого безлічі рішень («покоління») з урахуванням значення «пристосованості» вибираються рішення (зазвичай кращі особини мають велику ймовірність бути обраними), до яких застосовуються «генетичні оператори» (в більшості випадків «схрещування» – crossover і «мутація» – mutation), результатом чого є отримання нових рішень. Для них також обчислюється значення пристосованості, і потім проводиться відбір («селекція») кращих рішень в наступне покоління.
Цей набір дій повторюється ітеративне, так моделюється еволюційний процес
, що триває кілька життєвих циклів (поколінь), поки не буде виконано критерій зупинки алгоритму. Таким критерієм може бути:
– знаходження глобального або субоптимального рішення;
– вичерпання числа поколінь, відпущених на еволюцію;
– вичерпання часу, відпущеного на еволюцію.
3.3 Потенційні поля
Суть методу потенційних полів полягає в тому, що кожне перешкоду має навколо себе відразливе потенційне поле, сила якого обернено пропорційна відстані до нього; так само існує однорідна сила тяжіння до мети. Через короткі постійні інтервали часу обчислюється сума притягають і відштовхують векторів і об'єкт пересувається в цьому напрямку.
Переваги та недоліки:
Метод потенційних відомий досить давно і добре досліджений. Це один з найпростіших і ефективних алгоритмів навігації. В якості методики визначення векторів опору використовуються досить прості формули з фізики. Вони розраховуються тільки за показаннями сенсорів в поточний момент часу, тобто якщо робот не бачить перешкоду, то і опору воно не надає. Навіть якщо в пам'яті робота (на карті) ця перешкода присутня.
Недоліки цього методу випливають з його достоїнств. Цей алгоритм навігації хоч і дозволяє досягати мета є реактивним
, а не інтелектуальним. Локальність алгоритму часто робить його короткозорим
і неефективним для досягнення складних цілей. Так, він часто критикується за високу ймовірність попадання агента в локальний мінімум. Однак, на практиці, ця ймовірність дуже мала і може бути значно зменшена за рахунок додаткових, високорівневих поліпшень.
Детальне дослідження показало, що метод потенційних полів здатний провести робота в будь-яку точку змодельованої навколишнього середовища. Причому найголовніший недолік методу потенційних полів – потрапляння в локальні мінімуми зустрічається настільки рідко, у порівнянні з часом нормальної роботи алгоритму. Таким чином, метод потенційних полів є досить ефективною реалізацією найпростішою реалізацією навігаційної системи робота, так і компонентом більш складною навігаційної системи. Створення початкової популяції
Перед першим кроком потрібно випадковим чином створити початкову популяцію; навіть якщо вона виявиться абсолютно неконкурентоспроможною, ймовірно, що генетичний алгоритм все одно досить швидко переведе її в життєздатну популяцію. Таким чином, на першому кроці можна особливо не старатися зробити надто вже пристосованих особин, достатньо, щоб вони відповідали формату особин популяції, і на них можна було підрахувати функцію пристосованості (Fitness). Підсумком першого кроку є популяція H, що складається з N особин.
На етапі відбору потрібно з усієї популяції вибрати певну її частку, яка залишиться в живих» на цьому етапі еволюції. Є різні способи проводити відбір. Ймовірність виживання особини h повинна залежати від значення функції пристосованості Fitness(h). Сама частка вижили s зазвичай є параметром генетичного алгоритму, і її просто задають заздалегідь. За підсумками відбору з n особин популяції H повинні залишитися sN особин, які увійдуть в підсумкову популяцію H'. Решта особини гинуть.
– Турнірна селекція – спочатку випадково вибирається встановлену кількість особин (зазвичай дві), а потім з них вибирається особина з кращим значенням функції пристосованості
– рівномірне ранжування – ймовірність вибору особини визначається виразом
– Сигма відсікання – для запобігання передчасної збіжності генетичного алгоритму використовуються методи, масштабуючі значення цільової функції. Ймовірність вибір особини тим більше, чим оптимальніше значення масштабованої цільової функції – середнє значення цільової функції для всієї популяції, середньоквадратичне відхилення значення цільової функції.
4. Метод нечіткої логіки
Кожен з перерахованих методів має свої особливості практичного використання. Але часто для організації такого виду робототехнічного контролю, у замовника не вистачає фінансових коштів, з цього одним з більш дешевих, але не менш ефективних методів планування руху є метод «нечіткої логіки». Основним принципом даного методу є база правил дій вибір яких здійснюється логікою «If, else, then». Саме цей метод пропонується до розгляду. З допомогою даних операторів вибирається те чи інше правило до дії, що обумовлює подальший рух робототехнічної системи. Поведінка рухомого об'єкта являє собою безліч окремих поведінок, причому вибір певного безпосередньо залежить від стану навколишнього середовища. Таким чином можна підсумувати, що для орієнтації рухомої платформи в просторі, необхідний хоча б один «орган відчуттів», а саме датчик відстані. За допомогою його можна досить точно визначати відстань до об'єкта, що дозволяє мінімальному орієнтуванню платформи в просторі. Дане рішення має ряд переваг, і одне з них - це порівняно низька ціна організації автоматичної системи.
В даний час існує безліч систем включають в себе датчики відстані, а так само інші «органи почуттів» автономних систем. Однак для деяких ситуацій не потрібно складної системи, яка могла б наприклад запам'ятовувати розташування об'єктів, або GPS орієнтування. Саме в даних випадках найкраще підійде бюджетна система складається з мінімуму апаратних засобів.
4. Види і аналіз датчиків вимірювання відстані
Датчики відстані інформують про стан зовнішнього середовища за допомогою взаємодії з нею і перетворення реакції на цю взаємодію в вимірювальні сигнали. Існує безліч явищ та ефектів, видів перетворення сигналів і параметрів, які можна використовувати для створення датчиків. При класифікації датчиків в якості основного критерію використовується принцип їх дії, який, у свою чергу, базується на певних фізичних або хімічних явища та властивості.
Фактично робота датчиків відстані зводиться до того, що прилад посилає сигнал (лазерний промінь, ультразвукове випромінювання, ІЧ-промінь або магнітний і реагує на його відбиття від тіла, тим самим знаючи швидкість поширення звуку в пружному середовищі засікає різницю часу проходження сигналу від випромінювання до прийому.
На даний момент на вітчизняному ринку спеціального обладнання можна придбати різні види датчиків необхідних для вимірювання відстані. Найбільш популярними є такі різновиди датчиків:
– ІЧ датчик відстані – цей варіант пристрою використовує для визначення відстані інфрачервоний промінь;
– оптичні датчики відстані – що стосується оптичних датчиків, то за запевненням фахівців цей прилад має досить широкий діапазон, який варіюється в проміжку від 1 мм до 30 м;
– індуктивні датчики відстані – цей тип пристрою необхідний для того, щоб заміряти габаритні розміри предметів, виконаних з металу, а також для того, щоб визначати їх форму.
– ультразвуковий датчик вимірювання відстані – щоб отримати дані щодо відстані використовується ультразвуковий промінь, який вільно огинає будь-які незначні перешкоди і предмети.
5.1 ІЧ датчик відстані
Малюнок 1 – Інфрачервоний датчик відстані
Практично будь-який об'єкт випускає різне теплове випромінювання, яке фіксується інфрачервоними датчиками руху. За допомогою спеціальної системи лінз і особливих дзеркал ІЧ випромінювання об'єктів потрапляє на центральний сенсор датчика. При русі об'єктів відбувається зміна в цих системах інфрачервоного випромінювання, що призводить до реакції датчика. Якість фіксування руху ІК датчиками безпосередньо залежить від кількості розташованих в них систем лінз і дзеркал.
Основні недоліки інфрачервоних датчиків руху:
– ймовірність помилкових спрацьовувань даного виду датчиків (вплив будь-якого потоку теплого повітря);
– низька точність реакції датчика на відкритому просторі (вплив опадів або сонячного світла);
– невисокий діапазон робочих температур;
– нездатність реакції на об'єкти, які не пропускають ІЧ випромінювання.
Плюси інфрачервоних датчиків руху:
– величезна дальність фіксування руху, а також регулювання потрібного ула захоплення зони контролю;
– реагування датчиків виключно на об'єкти з власною температурою;
– гарантована безпека ІЧ датчиків для здоров'я людей і тварин (датчики не випускають випромінювання).
- ГОСТ 12.1.001–89 Ультразвук. Общие требования безопасности.
- Шайдуров В.В. Непомнящий О.В. Вейсов Е.А. Математика, механика, информатика. Построение математической модели преобразователя ультразвукового сигнала с целью практической реализации микропроцессорной системы сканирования высокотемпературных изделий.
- Васильев Е.Н. Деревьянко В.В. Программный комплекс для расчета температурных полей.
- Сенько В.Ф. Энергетическая электроника: Учебное пособие/ В.Ф. Сенько, А.В. Вовна, А.А. Зори. – Донецк: ДВУЗ
ДонНТУ
, 2014. – 312 с. - Жданкин В.К. Приборы для измерения уровня// Cовременные технологии автоматизации. – 2002 – № 3.
- Источники электропитания радиоэлектронной аппаратуры: Справочник/ Под ред. Г.С. Найвельта. – М.: Радио и связь, 1986. – 576 с..
- Коломбет Е.А., Юркович К., Зодл Я. Применение аналоговых микросхем. – М.: Радио и связь, 1990.– 320 с.
- Гутников В.С. Интегральная электроника в измерительных устройствах/ В.С. Гутников. – М.: Радио и связь, 1988. – 256 с.
- Изъюрова Г. И. Расчет электронных схем/ Г. И. Изъюрова. – М.: Высшая школа, 1987. – 153 с, 194 с.
- Матвеев А.Н. электричество и магнетизм. Учебное пособие – М.: высшая школа, 1983 – 463 с.
5.2 Лазерні датчики

Малюнок 2 – Лазерний датчик відстані
Якщо мова заходить про лазерний датчик, то на думку досвідчених фахівців слід віддавати перевагу наступним варіантам виконання:
– лазерний датчик відстані аrduino – цей прилад зарекомендував себе на вітчизняному ринку як один з найнадійніших і якісних.
– лазерні датчики відстані високої точності – в цьому випадку для виміру відстані використовується лазерний промінь. В процесі вимірювання можна задати дозвіл: від 0,01 мм до 0,1 мм.
– лазерні датчики відстані фазового типу – такий прилад вимірює відстань і форму предмета при отриманні фазової різниці між фазою відгуку і фазою повернення. Використання датчиків цього типу істотно спрощує роботу фахівця і робить її в кілька разів зручніше.
5.3 Ультразвукові датчики

Малюнок 3 – Ультразвуковий датчик відстані
Ультразвукові коливання (УЗК) створюють в повітрі, що є пружним середовищем, рухомі хвилі тиску з діапазоном частот понад 20 кГц; в інших середовищах ультразвукові хвилі поширюються з іншими частотами. Здатність УЗК поширюватися в різних середовищах використовується в системах неруйнівного контролю, эхолотах, уровнемерах, ультразвукових медичних діагностичних установках, датчики наближення систем автоматизації виробничих процесів і т. д.
У тому випадку, якщо перевагу було віддано датчику, необхідному для вимірювання відстані, ультразвукового типу, то варто вибирати з трьох варіантів:
– ультразвуковий датчик вимірювання відстані НС sr04 – виріб має дозвіл від 2см до 400 см. призначений для виміру великогабаритних об'єктів.
– ультразвукові датчики відстані Промситех – один з найпопулярніших варіантів на території РФ. За статистикою, його вибирає приблизно 67% всього населення.
Основним принципом дії даного виду датчиків є дослідження системи контролю за допомогою ультразвуку, частота якого недоступна для людських вух. Ультразвук посилається на всю область підконтрольну датчику, а потім він повертається назад. Відбувається розрахунок часу між моментом посилки сигналу і моментом прийому відбитого сигналу. У разі спотворення інформації про об'єкти спрацьовує певна функція датчика.
6. Розробка структурної схеми пристрою
Малюнок 4 – Ультразвуковий датчики відстані
6.1 Обґрунтування температурної залежності
За рахунок єдиної формули запрограмованої в пам'яті мікроконтролера, зі зміною температури починає з'являтися температурна похибка вимірів, яка прямо пропорційно збільшується з великим відхиленням температури від номінального значення. Для корекції даного температурного фактора в структурну схему пристрою введено вимірювальний канал температурної, який складається з датчика температури, вимірювального моста, підсилювача і призводить амплітуду прийнятого сигнал вхідного формату аналого-цифрового перетворювача, узгоджувального вхідний сигнал з цифровим входом мікроконтролера. За результатами вимірювання температури мікроконтролер вводить корекцію в результат вимірювання за допомогою наперед запрограмованих формул розрахунку температурної корекції.
На даному графіку наочно представлено відхилення показань ультразвукового датчика в залежності від температури.
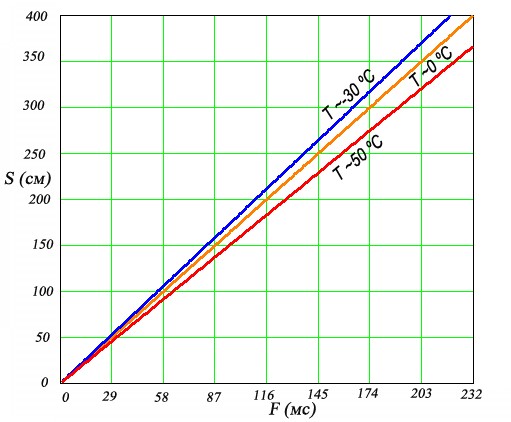
Малюнок 5 – Залежність вимірювань від темпреатуры
6.2 Структурна схема пристрою
Виходячи з вище наведених фактів була розроблена структурна схема електронного пристрою в якій був введений канал вимірювання температури. За допомогою даного каналу в стандартну формулу розрахунку відстані вводиться поправочний коефіцієнт, який практично прибирає температурну похибку ультразвукового вимірювання. Далі мікроконтролер діє за визначеним алгоритмом і передає відповідні команди або на блок індикації, якщо такий є, або на блок погодження з виконавчим механізмом, який приводить в дію або змінює стан силових агрегатів платформи.
Нижче наведена структурна схема електронного пристрою вимірювання відстані.
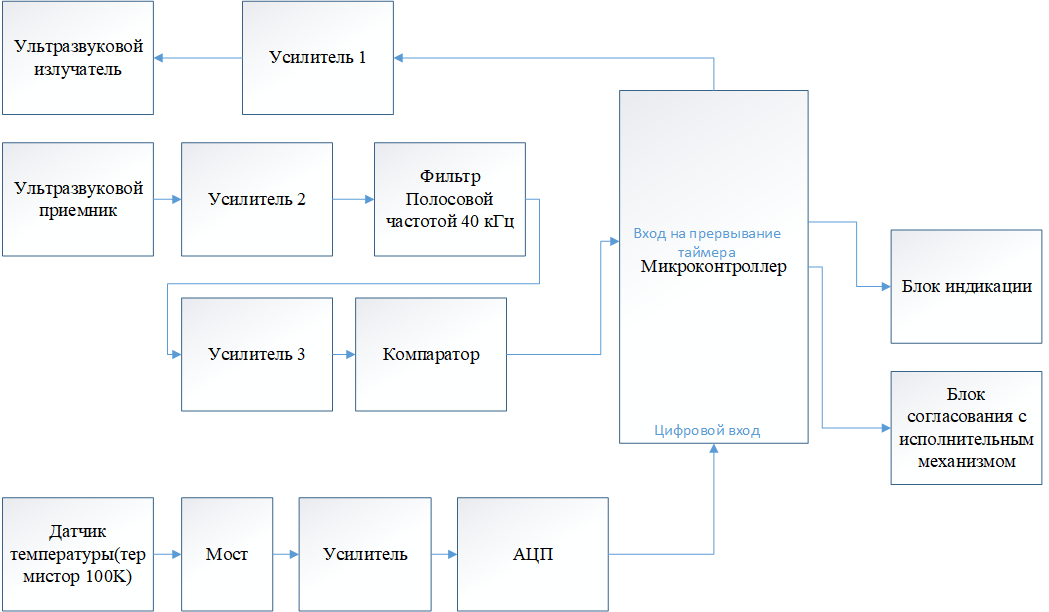
Малюнок 6 – Струтурная схема електронного пристрою вимірювання відстані
Висновки
В ході проведення дипломної роботи був проведений аналіз існуючих методів вимірювання відстані, вибрано найбільш підходящий, а саме ультразвуковий метод вимірювання відстані. Однак провівши розрахунки в різних температурних умовах був виявлений дефект даного методу, після чого був введений додатковий канал вимірювання температури навколишнього середовища для введення поправочного коефіцієнта. В результаті, можна сказати що пристрій в рази перевищує точність вимірювання відстані до перешкод рухомих об'єктів в порівнянні зі своїм прототипом. Дане підвищення точності вимірювань було досягнуто завдяки введенню в пристрій каналу вимірювання температури, і корекція формули обчислення відстані до перешкод. В результаті пристрій володіє всіма необхідними характеристиками для використання в різних температурних умовах.
Магістерська робота присвячена розробці пристрою орієнтування і визначення відстані до перешкод рухомих об'єктів, в різних погодних, а так же температурних умовах.
Виходячи з обраних методу і прототипу, була розроблена структурна схема вимірювальної системи.