
Исследование бортового вычислительного комплекса летательных аппаратов
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Идея работы
- 4. Описание системы бортового вычислительного управляющего комплекса
- Выводы
- Список источников
Введение
Бортовой вычислительный комплекс – совокупность аппаратно–программных средств, обеспечивающих автоматизацию информационных и управляющих процессов на борту объекта в режиме реального времени. Размещается на ЛА (космических кораблях, самолётах, вертолётах), а также на морских судах, наземных (военных, железнодорожных и др.) транспортных средствах с целью регулирования работы двигателей, обработки сигналов радиолокационной станции, решения задач навигации, выведения объекта на цель, контроля и управления работой бортовой аппаратуры, организации сеансов связи и др.
Первые в СССР бортовые вычислительные комплексы, реализуемые с применением дискретных компонентов, появились в начале 1960–х годов на ЛА и заменили аналоговые вычислители. В бортовых вычислительных комплексах второго поколения (середина 1970–х годов) применялись интегральные схемы, элементы совмещения операций, но структура оставалась детерминированной и трудномодернизируемой. Интегральные схемы позволили повысить быстродействие бортовых вычислительных комплексов в сотни раз при одновременном снижении в десятки раз энергопотребления и массы. Для бортовых вычислительных комплексов третьего поколения (начало 1980–х годов) разработаны иерархическая память, модульная организация архитектуры, механизмы защиты информации от несанкционированного доступа. Совершенствование микропроцессоров в конце 1980–х – начале 1990–х годов позволило поднять в десятки раз быстродействие бортовых ЭВМ.
1. Актуальность темы
Современный бортовой вычислительный комплекс (конец 1990–х годов) представляет собой сетевую структуру с многомашинной и многоуровневой организацией обработки данных и вычислений. Состоит из центральной ЭВМ, предназначенной для комплексного управления бортовыми системами, взаимодействия с экипажем, и терминальных ЭВМ, которые служат для получения, обработки и выдачи информации от датчиков и аппаратуры. Центральная ЭВМ, помимо стандартных блоков и программного обеспечения, включает операционную систему реального времени, программы тестового контроля аппаратуры, навигации, решения боевых задач, графические изображения, индикации, управления движением объекта и др. Такая структура обеспечивает как сопряжение и обмен информацией ЭВМ с бортовой аппаратурой, так и взаимодействие машин между собой. Архитектура бортового вычислительного комплекса позволяет создавать различные конфигурации многомашинных комплексов заданной производительности и надёжности, проводить замену отказавших блоков и устройств без прерывания вычислительного процесса.
Бортовой вычислительный комплекс должен соответствовать определённым требованиям: по ограничению массогабаритных характеристик, потребляемой мощности, повышенной надёжности функционирования, устойчивости к широкому диапазону внешних воздействий (механических, климатических, радиационных и др.). Архитектура пятого поколения бортового вычислительного комплекса ещё окончательно не определена. Предполагается наличие в структуре унифицированных интерфейсов, модулей интеллектуальных процессоров, способных к адаптации и обучению, а также развитых операционных систем и технических средств поддержки программ.
2. Цель и задачи исследования, планируемые результаты
Целью магистерской работы является: разработка системного подхода для проектирования программных и программно–аппаратных средств обеспечения отказоустойчивости управляющих структурно–избыточных ВС с детерминированным распределением ресурсов и создание на его основе математического обеспечения для восстановления ВП в бортовых ВС управления и контроля.
Основные задачи исследования:
- Взаимное структурирование аппаратурной и программной избыточности на основе учета закономерностей, связывающих принципы, способы и механизмы управления ВП и его восстановлением.
- Формализация процесса разработки средств обеспечения отказоустойчивости.
- Формирование функционально полной системы показателей, характеризующих программные и программно–аппаратные средства диагностирования, реконфигурации и восстановления ВП, а также их влияние на общие характеристики ВС.
- Проектирование математического обеспечения структурно избыточных ВС с детерминированным распределением ресурсов на основе различных способов восстановления, построение соответствующих математических моделей для оценки качества разрабатываемых средств.
- Разработка средств обеспечения отказоустойчивости для БВС с заданными архитектурой и операционной системой с учетом ограничений на выбор механизмов управления и восстановления ВП.
3. Идея работы
Бортовая цифровая вычислительная машина (сокращённо БЦВМ) – бортовой компьютер, предназначенный для установки на авиационные транспортные средства, ракеты–носители, разгонные блоки, космические аппараты, космические станции и др. Авиационные БЦВМ получили распространение не только на летательных аппаратах, но и на других подвижных и стационарных объектах. Отличие БЦВМ от различных специализированных вычислителей и блоков обработки данных (которых в современном самолёте предостаточно) в том, что БЦВМ имеют общепринятую для компьютеров структуру: наличие оперативной и долговременной памяти, устройств ввода–вывода и т. д. Поскольку бортовой вычислительный комплекс – это множество устройств, идея данной магистерской работы выявить использование ортогональных базисных функций вычислительного блока.
В настоящее время разработана БЦВМ «Аргон–15АР» на самой современной элементной базе, которая предназначена для физической замены широко распространённой устаревшей БЦВМ А–15 на подвижных и стационарных объектах, без выполнения каких-либо доработок, так как имеет полную аппаратную и программную совместимость (режим эмуляции А–15). Машина выполнена в виде одного моноблока на микропроцессоре 1890ВМ2Т, в несколько раз меньше базовой БЦВМ по массогабаритным параметрам и вдвое меньше по энергопотреблению, а также позволяет в дальнейшем производить усовершенствование установленного на объекте оборудования ввиду большого запаса по вычислительной мощности.
4. Описание системы бортового вычислительного управляющего комплекса
Рисунок 1 – Принцип работы бортового вычислительного управляющего комплекса.
Описывается бортовой комплекс управления для малого космического аппарата, работающего в составе системы мобильной связи на окололунных орбитах. Рассматривается специфика требований, предъявляемых к бортовым комплексам управления для работы на орбите Луны. Проводится анализ существующей архитектуры бортовых комплексов управления, выбор новой архитектуры, выбор составляющих частей рассматриваемой системы. Приводятся преимущества используемой перспективной сетевой технологии SpaceWire. Приводятся шаги по аппаратной реализации прототипа бортового комплекса управления. Рассматривается новое конструктивное исполнение бортового комплекса управления, позволяющее улучшить энергомассовые характеристики системы.
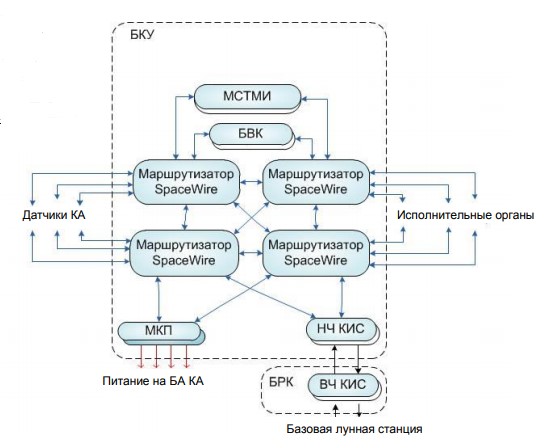
Рисунок 2 – Структурная схема бортового комплекса управления.
На основе анализа существующей архитектуры БКУ и применения перспективных технологий предлагается следующий аппаратный состав.
– Бортовой вычислительный комплекс (БВК) организует вычислительную среду, обеспечивает контроль и управление КА в штатных режимах, а также стыковку с аппаратурой, не поддерживающей SpaceWire.
– Модули сбора телеметрической информации (МСТМИ) служат для сбора телеметрической информации с бортовой аппаратуры КА и преобразования ее к цифровому виду для выдачи в сеть SpaceWire.
– Модуль коммутации питания (МКП) служит для коммутации питания бортовой аппаратуры и переключения комплектов БВК.
– Низкочастотная часть командно–измерительной системы (НЧ КИС) служит для передачи ТМИ из канала SpaceWire в ВЧ КИС и передачи разовых команд и командно–программной информации из ВЧ КИС в сеть SpaceWire.
– Маршрутизаторы SpaceWire (МСВ) являются системообразующей единицей сети, связывают узлы SpaceWire между собой.
– Программное обеспечение (ПО БКУ) организует вычислительный процесс, создает программную среду для контроля и управления КА, восстанавливает вычислительный процесс при нарушениях.
Реализация прототипа БКУ
Критерии выбора IP–ядра:
1) бесплатное распространение и использование в проекте;
2) открытый исходный код, доступный для модификации;
3) наличие и полнота документации по блоку;
4) максимальная совместимость с имеющейся платформой для разработки.
В результате поиска IP–блоков, реализующих стандарт SpaceWire, было найдено четыре различных блока: Open SpaceWire – бесплатный SpaceWire кодек. Предоставляется в виде VHDL–описания (есть возможность модификации). Документация описывает основные принципы функционирования IP–блока и некоторые критичные сигналы без детального описания. Интерфейс к шине AMBA отсутствует. SpaceWire Light – бесплатный SpaceWire кодек с интерфейсом к AMBA AHB. Предоставляется в виде VHDL–описания (есть возможность модификации). Документация детально описывает работу всех функциональных узлов блока и большинство сигналов взаимодействия с хост–устройствами.
Разработка маршрутизатора SpaceWire
Для построения сети на базе технологии SpaceWire применяются маршрутизаторы (маршрутизирующие коммутаторы), определяемые стандартом ECSS–E–ST–50–12C. МСВ связывают воедино узлы сети, предоставляя средства маршрутизации пакетов между подключенными к нему узлами. Основные элементы маршрутизирующего коммутатора – это SpaceWire интерфейсы (порты) и таблица маршрутизации. Согласно таблице маршрутизации пакеты передаются от одного порта к другому. Разрабатываемый маршрутизатор будет применён как для связи с внешними узлами, так и для коммуникации внутри ПЛИС (концепция NoC – network on chip, сеть на кристалле). Это позволит унифицировать подключение как внешних, так и внутренних устройств (IP–блоков). Структура разрабатываемого маршрутизатора позволяет помимо кодеков SpaceWire подключать к нему любые приемопередатчики, в том числе MIL–STD–1553B, который очень распространён в космической отрасли. Разрабатываемому маршрутизирующему коммутатору должны быть присущи следующие элементы:
– регулируемое количество портов SpaceWire;
– неблокирующий переключатель любого входного порта на любой выходной порт;
– внутренний порт конфигурации, доступный через SpaceWire или дополнительные порты;
– таблица маршрутизации, доступная через порт конфигурации;
– управляющая логика для контроля за работой маршрутизирующего коммутатора, осуществляющая арбитраж и групповую адаптивную маршрутизацию;
– управляющие регистры, которые могут быть записаны и прочитаны через конфигурационный порт, и содержащие управляющую информацию (например, скорость соединения);
– внутренние регистры состояния/ошибки, доступные через конфигурационный порт;
– внешние сигналы состояния/ошибки, позволяющие отслеживать работу маршрутизатора и в случае необходимости – принимать нужные меры для корректировки его работы.
Структура маршрутизатора приведена на рис. 3.
Рисунок 3 – Упрощенная структурная схема маршрутизатора.
Выводы
Объединение всевозможных данных, необходимых для выполнения расчетных процедур по проектированию БЦВС, составляет информационное обеспечение САПР.
Ресурсы ИМА представляют собой унифицированные конструктивно функциональные модули открытой архитектуры, имеющие собственные вычислительные средства. Целевую функцию технического проектирования ресурсов как компонентов ИМА определяет набор архитектурных признаков, связанных с технико–экономическими показателями комплекса БРЭО через набор релевантных параметров.
Организация вычислительного процесса в БЦВС ИМА осуществляется за счет процедур масштабирования (параметрического преобразования операционной модели) и диспетчеризации задач (назначения задач на доступные ресурсы).
Суммируя результаты, полученные в отдельных главах работы, можно сказать, что цель диссертации, сформулированная во введении, а именно, обобщение и развитие теории и методов автоматизации проектирования БЦВС и создание на этой основе теоретического обеспечения, охватывающего все необходимые аспекты проектирования и исследования принципов построения и методологии проектирования БЦВС в соответствии с основными положениями концепции ИМА, удовлетворяющая требованиям системного подхода, комплексности решаемых в работе задач и автоматизации проектирования в основном достигнута. Магистерская работа охватывает все необходимые грани проблемы разработки интегрированных БЦВС: общую теорию и методы принятия проектных решений на этапе предварительного проектирования, системный подход к этапам проектирования как объектам автоматизации, методологические основы разработки математических моделей БЦВС и алгоритмов автоматизированной генерации проектных решений методами формальных процедур математического анализа и синтеза, эффективные методы и алгоритмы анализа и оптимизации проектных решений на всех этапах проектирования. Разработанная на базе теории принятия решений и системного анализа методология формирования технического облика БЦВС на этапе ее предварительного проектирования совместно с исследованием проектных процедур как объектов автоматизации обеспечили возможность создания адекватного описания процесса синтеза БЦВС в условиях многокритериальности параметров системы и ее реального производства. Изложенные в различных главах диссертации положения составили организационное, техническое, математическое, программное, информационное и лингвистическое обеспечение САПР исследовательских стадий проектирования БЦВС, основной задачей которых является обеспечение вариантного анализа при отработке концепции проектируемой системы с последующим выбором окончательного варианта проекта. Все полученные в работе результаты нашли практическое применение и составили теоретическую и методологическую базу для создания интегрированных вычислительных систем в приборостроении в целом и, в частности, в авиационном приборостроении. Промышленная эксплуатация разработанных положений подтвердила правильность теоретических принципов и методов, рассмотренных в диссертации, и показала их высокую эффективность, обеспечивающую повышение производительности труда проектировщиков, технико-экономического уровня проектов в производстве бортового оборудования.
Список источников
- Агеев В. В., Андросов В. А., Антонов И. К. и др. Стендово-имитационная среда для отработки комплексов бортового оборудования // Мир авиони-ки. 2003. №5. С. 30—35.
- Айвазян С. А., Енюков И. С., Мешалкин Л. Д. и др. Прикладная статистика. Исследование зависимостей: Справ, изд. / Под ред. С. А. Айвазяна. М.: Финансы и статистика. 1985. 487с.
- Андреев А. Г. Проблемы реструктуризации и корпоративные НИОКР // Мир авионики. 2000. №3. С. 12—14.
- Андреев Л. В., Богословский С. В., Видин Б. В., Жаринов И; О., Жаринов О. О. Парамонов П. П., Шек-Иовсепянц Р. А. Межсамолетная навигация группы летательных аппаратов // Известия вузов. Приборостроение. 2009. Т. 52. №11. С. 12—15.
- Анцев Г. В. Принципы построения бортовых информационно-управляющих систем высокоточного оружия нового поколения // Радиотехника. 2001. № 8. С. 81—86.
- Аоки М. Введение в методы оптимизации. М.: Наука. 1977. 344 с.
- Архитектура многопроцессорных вычислительных систем: Учеб. пособие / О. С. Козлов, Е. А. Метлицкий, А. В. Экало // Под ред. В. И. Тимохина. Л.: Изд-во Ленингр. ун-та. 1981.104 с.
- П.Баглюк С. С. Модель процесса передачи данных между прикладными уровнями распределенной вычислительной системы // Известия вузов. Приборостроение. 2008. Т. 51. №5. С. 15—21.
- Уэйкерли Д. Проектирование цифровых устройств / Д. Уэйкерли. – М.: Постмаркет, 2002. – Том 2. – 528 с.
- Баханов Л. Е. Принципы боевого управления истребителем, обеспечивающего реализацию возможности авиационного комплекса // Вопросы авионики. 2005. вып.2 (16). С. 39—48.
- Белов В. П., Белов В. В. Структура информационных технологий обеспечения аналитической деятельности // Проблемы информатизации. 1999. №2. С. 12—15.
- Н.Белокуров С. В. Задача выбора оптимальных вариантов на основе вероятностного подхода // Вестник ВГТУ. Сер: Радиоэлектроника и системы связи. 2006. №7. С. 59—62.
- Белокуров С. В. Модели выбора недоминируемых вариантов в численных схемах многокритериальной оптимизации. Воронеж: Научная книга. 2005. 199 с.
- Беломытцев В. Приборные корпуса Schroff: смена поколений // Современные технологии автоматизации. 2007. №2. С. 8—12.
- Березкин В. Е., Каменев Г. К., Лотов А. В. Гибридные адаптивные методы аппроксимации невыпуклой многомерной границы Парето // Журнал вычислительной математики и математической физики. 2006. Т. 46, №11, С. 2009—2023.
- Богатырев В. А. К распределению функциональных ресурсов в отказоустойчивых многомашинных вычислительных системах // Приборы и Системы. Управление, Контроль, Диагностика. 2001. №12. С. 1—5.
- Бомер М. А., Мурин А. В., Соколов О. В., Чуянова Е. Г. Методические вопросы оценки показателей надежности резервированных систем // Информационные технологии в разработках сложных систем. 2005. вып.1 (13). С. 37—53.
- Борисов Ю. И. Отечественная электронная промышленность и компонентная база. Перспективы развития // Электроника: НТБ. 2006. №2. С. 6—9.
- Вальковский В. А. Распараллеливание алгоритмов и программ. Структурный подход. М.: Радио и связь. 1989. 176 с.
- Васьковский С. В. Об одном подходе к построению интегрированной информационно-вычислительной сети // Датчики и системы. 2004. №3. С. 36—38.
- Ватутин Э. И., Зотов И. В. Аппаратная модель для определения минимального числа блоков при декомпозиции параллельных алгоритмов логического управления // Известия вузов. Приборостроение. 2008. Т. 51. №2, С. 39—43.
- Ведерников Ю В. Некоторые подходы к решению задачи выбора сложных систем на основе нечетких отношений предпочтения // Мехатроника, автоматизация, управление. 2008. №6. С. 6—11.
- Видин Б. В., Жаринов И. О., Жаринов О. О. Декомпозиционные методы в задачах распределения вычислительных ресурсов многомашинных комплексов бортовой авионики // Информационно-управляющие системы. 2010. №1. С.2—5.