
Дослідження бортового обчислювального керуючого комплексу
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Ідея роботи
- 4. Опис системи бортового обчислювального керуючого комплексу
- Висновки
- Перелік посилань
Вступ
Бортовий обчислювальний комплекс – сукупність апаратно–програмних засобів, що забезпечують автоматизацію інформаційних і керуючих процесів на борту об'єкта в режимі реального часу. Розміщується на ЛА (космічних кораблях, літаках, вертольотах), а також на морських судах, наземних (військових, залізничних і ін.) транспортних засобах з метою регулювання роботи двигунів, обробки сигналів радіолокаційної станції, вирішення завдань навігації, виведення об'єкта на мету, контролю та управління роботою бортової апаратури, організації сеансів зв'язку та ін.
Перші в СРСР бортові обчислювальні комплекси, реалізовані із застосуванням дискретних компонентів, з'явилися на початку 1960–х років на ЛА і замінили аналогові обчислювачі. У бортових обчислювальних комплексах другого покоління (середини 1970–х років) застосовувалися інтегральні схеми, елементи суміщення операцій, але структура залишалася детермінованою і важкомодернізіруємою. Інтегральні схеми дозволили підвищити швидкодію бортових обчислювальних комплексів в сотні раз при одночасному зниженні в десятки разів енергоспоживання і маси. для бортових обчислювальних комплексів третього покоління (початок 1980–х років) розроблені ієрархічна пам'ять, модульна організація архітектури, механізми захисту інформації від несанкціонованого доступу. Удосконалення мікропроцесорів в кінці 1980–х – початку 1990–х років дозволило підняти в десятки разів швидкодію бортових ЕОМ.
1. Актуальність теми
Сучасний бортовий обчислювальний комплекс (кінець 1990–х років) являє собою мережеву структуру з багатомашинною і багаторівневої організацією обробки даних і обчислень. Складається з центральній ЕОМ, призначеної для комплексного управління бортовими системами, взаємодії з екіпажем, і термінальних ЕОМ, які служать для отримання, обробки та видачі інформації від датчиків та апаратури. Центральна ЕОМ, крім стандартних блоків і програмного забезпечення, включає операційну систему реального часу, програми тестового контролю апаратури, навігації, рішення бойових задач, графічні зображення, індикації, управління рухом об'єкта та ін. Така структура забезпечує як сполучення та обмін інформацією ЕОМ з бортовою апаратурою, так і взаємодію машин між собою. Архітектура бортового обчислювального комплексу дозволяє створювати різні конфігурації багатомашинних комплексів заданої продуктивності і надійності, проводити заміну відмовили блоків і пристроїв без переривання обчислювального процесу.
Бортовий обчислювальний комплекс повинен відповідати певним вимогам: по обмеженню масогабаритних характеристик, споживаної потужності, підвищеної надійності функціонування, стійкості до широкого діапазону зовнішніх впливів (механічних, кліматичних, радіаційних і ін.). Архітектура п'ятого покоління бортового обчислювального комплексу ще остаточно не визначена. Передбачається наявність в структурі уніфікованих інтерфейсів, модулів інтелектуальних процесорів, здатних до адаптації і навчання, а також розвинених операційних систем і технічних засобів підтримки програм.
2. Мета і задачі дослідження та заплановані результати
Метою магістерської роботи є: розробка системного підходу для проектування програмних і програмно–апаратних засобів забезпечення відмовостійкості керуючих структурно–надлишкових ВС з детермінованим розподілом ресурсів і створення на його основі математичного забезпечення для відновлення ВП в бортових ВС управління і контролю.
Основні задачі дослідження:
- Взаємне структурування апаратурною і програмної надмірності на основі врахування закономірностей, що пов'язують принципи, способи і механізми управління ВП і його відновленням.
- Формалізація процесу розробки засобів забезпечення відмовостійкості.
- Формування функціонально повної системи показників, що характеризують програмні та програмно–апаратні засоби діагностування, реконфігурації і відновлення ВП, а також їх вплив на загальні характеристики ВС.
- Проектування математичного забезпечення структурно надлишкових ВС з детермінованим розподілом ресурсів на основі різних способів відновлення, побудова відповідних математичних моделей для оцінки якості розроблюваних засобів.
- Розробка засобів забезпечення відмовостійкості для БВС з заданими архітектурою і операційною системою з урахуванням обмежень на вибір механізмів управління та відновлення ВП.
3. Ідея роботи
Бортова цифрова обчислювальна машина (скорочено БЦВМ) – бортовий комп'ютер, призначений для установки на авіаційні транспортні засоби, ракети–носії, розгінні блоки, космічні апарати, космічні станції і ін. Авіаційні БЦВМ набули поширення не тільки на літальних апаратах, але й на інших рухомих і стаціонарних об'єктах. Відмінність БЦВМ від різних спеціалізованих обчислювачів і блоків обробки даних (яких в сучасному літаку предостатньо) в тому, що БЦВМ мають загальноприйняту для комп'ютерів структуру: наявність оперативної і довготривалої пам'яті, пристроїв введення–виведення і т. д. Оскільки бортовий обчислювальний комплекс – це безліч пристроїв, ідея даної магістерської роботи виявити використання ортогональних базисних функцій обчислювального блоку.
В даний час розроблена БЦВМ «Аргон–15АР» на найсучаснішій елементній базі, яка призначена для фізичної заміни широко поширеною застарілої БЦВМ А–15 на рухомих і стаціонарних об'єктах, без виконання яких-небудь доопрацювань, так як має повну апаратну і програмну сумісність (режим емуляції А–15). Машина виконана у вигляді одного моноблока на процесорі 1890ВМ2Т, в кілька разів менше базової БЦВМ за масогабаритні параметрами і вдвічі менше по енергоспоживанню, а також дозволяє в подальшому проводити удосконалення встановленого на об'єкті обладнання зважаючи на великий запасу по обчислювальної потужності
4. Опис системи бортового обчислювального керуючого комплексу
Малюнок 1 – Принцип роботи бортового обчислювального керуючого комплексу.
Описується бортовий комплекс управління для малого космічного апарату, працюючого в складі системи мобільного зв'язку на навколомісячній орбіті. Розглядається специфіка вимог, що пред'являються до бортовим комплексам управління для роботи на орбіті Місяця. Проводиться аналіз існуючої архітектури бортових комплексів управління, вибір нової архітектури, вибір складових частин даної системи. Наводяться переваги використовуваної перспективною мережевої технології SpaceWire. Наводяться кроки по апаратної реалізації прототипу бортового комплексу управління. розглядається нове конструктивне виконання бортового комплексу управління, що дозволяє поліпшити енергомассового характеристики системи.
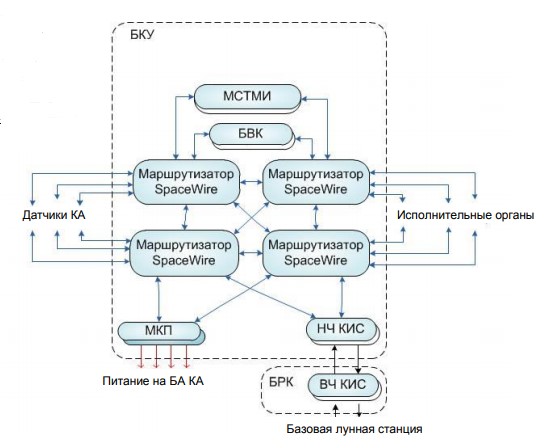
Малюнок 2 – Структурна схема бортового комплексу управління.
На основі аналізу існуючої архітектури БКУ і застосування перспективних технологій пропонується наступний апаратний склад.
– Бортовий обчислювальний комплекс (БВК) організовує обчислювальну середу, забезпечує контроль і управління КА в штатних режимах, а також стикування з апаратурою, що не підтримує SpaceWire.
– Модулі збору телеметричної інформації (МСТМІ) служать для збору телеметричної інформації з бортової апаратури КА і перетворення її до цифровому вигляді для видачі в мережу SpaceWire.
– Модуль комутації харчування (МКП) служить для комутації харчування бортової апаратури і перемикання комплектів БВК.
– Низькочастотна частина командно–вимірювальної системи (НЧ КІС) служить для передачі ТМИ з каналу SpaceWire в ВЧ КІС і передачі разових команд і командно–програмної інформації з ВЧ КІС в мережу SpaceWire.
– Маршрутизатор SpaceWire (МСВ) є системоутворюючою одиницею мережі, пов'язують вузли SpaceWire між собою.
– Програмне забезпечення (ПО БКУ) організовує обчислювальний процес, створює програмне середовище для контролю і управління КА, відновлює обчислювальний процес при порушеннях.
Реалізація прототипу БКУ
Критерії вибору IP–ядра:
1) безкоштовне розповсюдження і використання в проекті;
2) відкритий вихідний код, доступний для модифікації;
3) наявність і повнота документації по блоку;
4) максимальна сумісність з наявної платформою для розробки.
В результаті пошуку IP–блоків, що реалізують стандарт SpaceWire, було знайдено чотири різних блоку: Open SpaceWire – безкоштовний SpaceWire кодек. Надається у вигляді VHDL–опису (є можливість модифікації). Документація описує основні принципи функціонування IP–блоку і деякі критичні сигнали без детального опису. Інтерфейс до шини AMBA відсутня. SpaceWire Light – безкоштовний SpaceWire кодек з інтерфейсом до AMBA AHB. Надається у вигляді VHDL–опису (є можливість модифікації). документація детально описує роботу всіх функціональних вузлів блоку і більшість сигналів взаємодії з хост–пристроями.
Розробка маршрутизатора SpaceWire
Для побудови мережі на базі технології SpaceWire застосовуються маршрутизатори (Маршрутизовані комутатори), які визначаються стандартом ECSS–E–ST–50–12C. МСВ пов'язують воєдино вузли мережі, надаючи кошти маршрутизації пакетів між підключеними до нього вузлами. Основні елементи маршрутизирующего комутатора – це SpaceWire інтерфейси (порти) і таблиця маршрутизації. Згідно таблиці маршрутизації пакети передаються від одного порту до іншого. Розроблюваний маршрутизатор буде застосований як для зв'язку з зовнішніми вузлами, так і для комунікації всередині ПЛІС (концепція NoC – network on chip, мережа на кристалі). Це дозволить уніфікувати підключення як зовнішніх, так і внутрішніх пристроїв (IP–блоків). Структура розроблювального маршрутизатора дозволяє крім кодеків SpaceWire підключати до нього будь-які приймачі, в тому числі MIL–STD–1553B, який дуже поширений в космічній галузі. Розробляється маршрутизовані комутатори повинні бути притаманні такі елементи:
– регульоване кількість портів SpaceWire;
– неблокірующій перемикач будь-якого вхідного порту на будь–який вихідний порт;
– внутрішній порт конфігурації, доступний через SpaceWire або додаткові порти;
– таблиця маршрутизації, доступна через порт конфігурації;
– керуюча логіка для контролю за роботою маршрутизирующего комутатора, що здійснює арбітраж і групову адаптивну маршрутизацію;
– керуючі регістри, які можуть бути записані і прочитані через конфігураційний порт, і містять інформацію, що управляє (наприклад, швидкість з'єднання);
– внутрішні регістри стану/помилки, доступні через конфігураційний порт;
– зовнішні сигнали стану/помилки, що дозволяють відслідковувати роботу маршрутизатора і в разі необхідності – приймати необхідні заходи для коригування його роботи.
Структура маршрутизатора приведена на мал. 3.
Малюнок 3 – Спрощена структурна схема маршрутизатора.
Висновки
Об'єднання всіляких даних, необхідних для виконання розрахункових процедур з проектування БЦВС, становить інформаційне забезпечення САПР.
Ресурси ІМА є уніфіковані конструктивно функціональні модулі відкритої архітектури, що мають власні обчислювальні засоби. Цільову функцію технічного проектування ресурсів як компонентів ІМА визначає набір архітектурних ознак, пов'язаних з техніко–економічними показниками комплексу БРЕО через набір релевантних параметрів.
Організація обчислювального процесу в БЦВС ІМА здійснюється за рахунок процедур масштабування (параметричного перетворення операційної моделі) і диспетчеризації завдань (призначення завдань на доступні ресурси).
Підсумовуючи результати, отримані в окремих розділах роботи, можна сказати, що мета дисертації, сформульована у вступі, а саме, узагальнення і розвиток теорії і методів автоматизації проектування БЦВС і створення на цій основі теоретичного забезпечення, що охоплює всі необхідні аспекти проектування і дослідження принципів побудови і методології проектування БЦВС відповідно до основних положень концепції ІМА, яка задовольняє вимоги системного підходу, комплексності розв'язуваних у роботі завдань і автоматизації проектування в основному досягнута. Магістерська робота охоплює всі необхідні межі проблеми розробки інтегрованих БЦВС: загальну теорію і методи прийняття проектних рішень на етапі попереднього проектування, системний підхід до етапів проектування як об'єктам автоматизації, методологічні основи розробки математичних моделей БЦВС і алгоритмів автоматизованої генерації проектних рішень методами формальних процедур математичного аналізу і синтезу, ефективні методи і алгоритми аналізу та оптимізації проектних рішень на всіх етапах проектування. Розроблена на базі теорії прийняття рішень та системного аналізу методологія формування технічного вигляду БЦВС на етапі її попереднього проектування спільно з дослідженням проектних процедур як об'єктів автоматизації забезпечили можливість створення адекватного опису процесу синтезу БЦВС в умовах многокритериальности параметрів системи і її реального виробництва. Викладені в різних розділах дисертації положення склали організаційне, технічне, математичне, програмне, інформаційне та лінгвістичне забезпечення САПР дослідних стадій проектування БЦВС, основним завданням яких є забезпечення вариантного аналізу при відпрацюванні концепції проектованої системи з подальшим вибором остаточного варіанту проекту. Всі отримані в роботі результати знайшли практичне застосування і склали теоретичну і методологічну базу для створення інтегрованих обчислювальних систем в приладобудуванні в цілому і, зокрема, в авіаційному приладобудуванні. Промислова експлуатація розроблених положень підтвердила правильність теоретичних принципів і методів, розглянутих в дисертації, і показала їх високу ефективність, що забезпечує підвищення продуктивності праці проектувальників, техніко економічного рівня проектів у виробництві бортового обладнання.
Перелік посилань
- Агеев В. В., Андросов В. А., Антонов И. К. и др. Стендово-имитационная среда для отработки комплексов бортового оборудования // Мир авиони-ки. 2003. №5. С. 30—35.
- Айвазян С. А., Енюков И. С., Мешалкин Л. Д. и др. Прикладная статистика. Исследование зависимостей: Справ, изд. / Под ред. С. А. Айвазяна. М.: Финансы и статистика. 1985. 487с.
- Андреев А. Г. Проблемы реструктуризации и корпоративные НИОКР // Мир авионики. 2000. №3. С. 12—14.
- Андреев Л. В., Богословский С. В., Видин Б. В., Жаринов И; О., Жаринов О. О. Парамонов П. П., Шек-Иовсепянц Р. А. Межсамолетная навигация группы летательных аппаратов // Известия вузов. Приборостроение. 2009. Т. 52. №11. С. 12—15.
- Анцев Г. В. Принципы построения бортовых информационно-управляющих систем высокоточного оружия нового поколения // Радиотехника. 2001. № 8. С. 81—86.
- Аоки М. Введение в методы оптимизации. М.: Наука. 1977. 344 с.
- Архитектура многопроцессорных вычислительных систем: Учеб. пособие / О. С. Козлов, Е. А. Метлицкий, А. В. Экало // Под ред. В. И. Тимохина. Л.: Изд-во Ленингр. ун-та. 1981.104 с.
- П.Баглюк С. С. Модель процесса передачи данных между прикладными уровнями распределенной вычислительной системы // Известия вузов. Приборостроение. 2008. Т. 51. №5. С. 15—21.
- Уэйкерли Д. Проектирование цифровых устройств / Д. Уэйкерли. – М.: Постмаркет, 2002. – Том 2. – 528 с.
- Баханов Л. Е. Принципы боевого управления истребителем, обеспечивающего реализацию возможности авиационного комплекса // Вопросы авионики. 2005. вып.2 (16). С. 39—48.
- Белов В. П., Белов В. В. Структура информационных технологий обеспечения аналитической деятельности // Проблемы информатизации. 1999. №2. С. 12—15.
- Н.Белокуров С. В. Задача выбора оптимальных вариантов на основе вероятностного подхода // Вестник ВГТУ. Сер: Радиоэлектроника и системы связи. 2006. №7. С. 59—62.
- Белокуров С. В. Модели выбора недоминируемых вариантов в численных схемах многокритериальной оптимизации. Воронеж: Научная книга. 2005. 199 с.
- Беломытцев В. Приборные корпуса Schroff: смена поколений // Современные технологии автоматизации. 2007. №2. С. 8—12.
- Березкин В. Е., Каменев Г. К., Лотов А. В. Гибридные адаптивные методы аппроксимации невыпуклой многомерной границы Парето // Журнал вычислительной математики и математической физики. 2006. Т. 46, №11, С. 2009—2023.
- Богатырев В. А. К распределению функциональных ресурсов в отказоустойчивых многомашинных вычислительных системах // Приборы и Системы. Управление, Контроль, Диагностика. 2001. №12. С. 1—5.
- Бомер М. А., Мурин А. В., Соколов О. В., Чуянова Е. Г. Методические вопросы оценки показателей надежности резервированных систем // Информационные технологии в разработках сложных систем. 2005. вып.1 (13). С. 37—53.
- Борисов Ю. И. Отечественная электронная промышленность и компонентная база. Перспективы развития // Электроника: НТБ. 2006. №2. С. 6—9.
- Вальковский В. А. Распараллеливание алгоритмов и программ. Структурный подход. М.: Радио и связь. 1989. 176 с.
- Васьковский С. В. Об одном подходе к построению интегрированной информационно-вычислительной сети // Датчики и системы. 2004. №3. С. 36—38.
- Ватутин Э. И., Зотов И. В. Аппаратная модель для определения минимального числа блоков при декомпозиции параллельных алгоритмов логического управления // Известия вузов. Приборостроение. 2008. Т. 51. №2, С. 39—43.
- Ведерников Ю В. Некоторые подходы к решению задачи выбора сложных систем на основе нечетких отношений предпочтения // Мехатроника, автоматизация, управление. 2008. №6. С. 6—11.
- Видин Б. В., Жаринов И. О., Жаринов О. О. Декомпозиционные методы в задачах распределения вычислительных ресурсов многомашинных комплексов бортовой авионики // Информационно-управляющие системы. 2010. №1. С.2—5.