
Abstract
This abstract is used as an example, with the permission of Evgeniy Tatolov.
Original: http://masters.donntu.ru/2011/fknt/tatolov/diss/indexe.htm
Content
- Introduction
- 1. Theme urgency
- 2. Goal and tasks of the research
- 3. Work idea
- 4. Description of the onboard computing control system
- 5. Findings
- References
Introduction
On—Board Computing a set of hardware and software tools that automate information and control processes onboard the facility in real time. Placed on aircraft (spacecraft, airplanes, helicopters), as well as on ships, ground (military, railway, etc.) vehicles in order to regulate the operation of engines, processing radar signals, solving problems of navigation, bringing the object to the target, controlling and management of on—board equipment, communication sessions, etc.
The USSR’s first on-board computer systems, implemented using discrete components, appeared in the early 1960s and LA and replaced the analog computers. In the onboard computing systems of the second generation (mid 1970s), integrated circuits were used, elements of combining operations, but the structure remained deterministic and difficult to modernize. Integrated circuits made it possible to increase the speed of on—board computer systems hundreds of times while simultaneously reducing power consumption and mass by dozens of times. For on—board computing systems of the third generation (early 1980s), hierarchical memory, modular organization of architecture, and mechanisms for protecting information from unauthorized access were developed. Improving microprocessors at the end of 1980's, the beginning of 1990's; allowed to increase the speed of on—board computers tenfold.
1. Theme urgency
A modern on—board computer complex (the end of the 1990's) is a network structure with multi—machine and multi—level organization of data processing and computing. It consists of a central computer designed for integrated control of onboard systems, interaction with the crew, and terminal computers, which are used to receive, process and issue information from sensors and equipment. The central computer, in addition to standard units and software, includes a real—time operating system, programs for test control of equipment, navigation, solving combat missions, graphic images, indications, control of the movement of an object, etc. This structure provides both interfacing and the exchange of computer information with on—board equipment, and the interaction of machines with each other. The architecture of the on-board computer complex allows you to create various configurations of multi—machine complexes of a given performance and reliability, to carry out the replacement of failed blocks and devices without interrupting the computational process.
The on-board computer system must meet certain requirements: to limit the weight and size characteristics, power consumption, increased reliability of operation, resistance to a wide range of external influences (mechanical, climatic, radiation, etc.). The architecture of the fifth generation of the onboard computing complex has not yet been definitively determined. It is assumed that the structure includes unified interfaces, modules of intelligent processors capable of adaptation and training, as well as advanced operating systems and technical means of program support.
2. The purpose and objectives of the study, the planned results
The purpose of the thesis is: development of a systematic approach for designing software and software—hardware for ensuring the fault tolerance of structural supervisors for redundant aircraft with deterministic resource allocation and creating on its basis mathematical software for restoring the airspace to airborne command and control aircraft.
The main objectives of the study:
- Mutual structuring of hardware and software redundancy on the basis of taking into account the laws linking the principles, methods and mechanisms of managing the EP and its restoration.
- Formalizing the development of resiliency tools.
- Formation of a functionally complete system of indicators describing software and software—hardware tools for diagnosing, reconfiguring and restoring a VI, as well as their influence on the general characteristics of the aircraft.
- Designing mathematical software for structurally redundant aircrafts with deterministic distribution of resources based on various recovery methods, building appropriate mathematical models for assessing the quality of the tools being developed.
- Development of resiliency tools for UAs with a given architecture and operating system, taking into account the limitations on the choice of control and recovery mechanisms for VIs.
3. Work idea
On—board digital computer (abbreviated to the on-board computer) on—board computer designed for installation on aircraft vehicles, rockets—carriers, accelerating units, spacecraft, space stations, etc. Aircraft hand-held computers have spread not only on aircraft, but also on other mobile and stationary objects. The difference in the onboard computer from various specialized calculators and data processing units (which are abundant in modern aircraft) is that the onboard computer has the structure generally accepted for computers: the presence of operational and long-term memory, input devices—output, etc. Since the on—board computer complex. This set of devices, the idea of ??this master's work to identify the use of orthogonal basic functions of the computing unit.
Currently, the Argon 15 15AR personal computer is developed on the most modern elemental base, which is designed to physically replace the widely used obsolete A-15 computer on mobile and stationary objects, without any modifications, as it has full hardware and software compatibility ( A emulation mode & ndash; 15). The machine is designed as a single monoblock on a 1890BM2T microprocessor, several times smaller than the base onboard computer for weight and size parameters and half as much in terms of power consumption, and also allows further improvement of the equipment installed at the facility due to the large computational power reserve.
4. Description of the onboard computing control system
Picture 1 – The principle of operation of the onboard computing control complex.
Describes the on–board control system for a small spacecraft operating as part of a mobile communications system on near–moon orbits. The specifics of the requirements for on–board control complexes for lunar orbital operations are considered. The analysis of the existing architecture of the onboard control systems, the choice of a new architecture, the choice of the constituent parts of the system under consideration are carried out. The advantages of the prospective use are given. SpaceWire network technology. Steps are given for the hardware implementation of the prototype of the onboard control complex. A new design of the onboard control complex is considered, which allows to improve the energy-mass characteristics of the system.
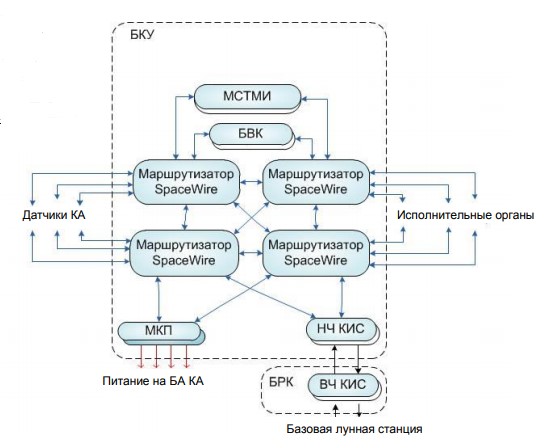
Picture 2 – Structural diagram of the onboard control complex.
Based on the analysis of the existing BUD architecture and application of promising The technology proposed is the following hardware.
– The on-board computing complex (BVK) organizes the computing environment, provides control and control of the spacecraft in normal modes, as well as docking with equipment that does not support SpaceWire.
– The telemetric information acquisition modules (MSTMI) are used to collect telemetric information from the onboard equipment of the spacecraft and convert it to digital form for output to the SpaceWire network.
– The power switching module (MCP) is used to switch power onboard equipment and switching sets BVK.
– The low–frequency part of the command–measuring system (LF KIS) serves for transmission of TMI from the SpaceWire channel to the HF ICC and transfer of one–time commands and command-program information from the HF IC to the network SpaceWire.
– SpaceWire (MCV) routers are a backbone unit network, connect SpaceWire nodes to each other.
– Software (software BKU) organizes the computational process, creates software environment for monitoring and controlling spacecraft, restoring the computational process for violations.
Implementation of the prototype BUD
Criteria for choosing an IP–kernel:
1) free distribution and use in the project;
2) open source code available for modification;
3) availability and completeness of documentation on the block;
4) maximum compatibility with the existing development platform.
The search for IP–blocks implementing the SpaceWire standard was Four different blocks found: Open SpaceWire free spacewire codec Provided as a VHDL description. The documentation describes the basic principles of the operation of the IP–block and some critical signals without detailed description. The interface to the AMBA bus is missing. SpaceWire Light free SpaceWire codec with interface to AMBA AHB. Provided in the form of a VHDL–description (there is possibility of modification). Documentation describes in detail the operation of all functional units of the block and most signals interactions with the host–devices.
SpaceWire Router Development
Routers are used to build a network based on SpaceWire technology. (routing switches) defined by standard ECSS–E–ST–50–12C. MCBs tie together network nodes, providing packet routing tools between the nodes connected to it. The main elements of the routing switch these are SpaceWire interfaces (ports) and a routing table. According to routing table packets are sent from one port to another. The router being developed will be used as a link to external nodes, and for communication within the FPGA (concept of NoC network on chip, network on the crystal). This will allow to unify the connection both external and internal devices (IP–blocks). The structure of the developed router allows in addition to SpaceWire codecs connect any transceiver to it, including MIL–STD–1553B, which very common in the space industry. The following routing switch should be developed Items:
– adjustable number of SpaceWire ports;
– non–blocking switch of any input port to any output port;
– internal configuration port accessible via SpaceWire or additional ports;
– routing table available through the configuration port;
– control logic to monitor the operation of the routing switch, performing arbitration and group adaptive routing;
– control registers that can be written and read through configuration port, and containing control information (for example, speed connections);
– internal status/error registers accessible via configuration port;
– external status/error signals to track performance a router and, if necessary, & ndash; take the necessary measures for adjustments to his work.
The structure of the router is shown in pic. 3
Picture 3 – Simplified Router Chart.
Implementation of group adaptive routing is planned – powerful the tool described by the SpaceWire standard. This tool allows achieve channel redundancy, increase bandwidth at the expense of increase the number of routes between SpaceWire network nodes.Findings
Combine all sorts of data needed for the implementation of design procedures for the design of the BCSA, is an information provision of CAD.
IMA resources are unified structurally functional open architecture modules having their own computational tools. Target technical resource engineering function how the components of the IMA determine the set of architectural features associated with technical and economic indicators of the avionics complex through a set of relevant parameters.
The organization of the computational process in BTsS IMA carried out by scaling procedures (parametric transformation of the operating model) and scheduling tasks (task assignments available resources).
Summarizing the results obtained in the individual chapters work, it can be said that the purpose of the thesis formulated in the introduction, and namely, the generalization and development of the theory and methods of computer-aided design of the bcws and creating on this basis a theoretical assumption covering all necessary aspects of designing and researching the principles of construction and design methodology BTsS in accordance with the main provisions IMA concept, satisfying the requirements of a systems approach, complexity the tasks solved in the work and the automation of design is basically achieved. Master's work covers all the necessary facets of the development problem: integrated bcws: general theory and methods of making design decisions at the stage preliminary design, systematic approach to the design stages as objects of automation, methodological foundations of the development of mathematical models of bcws and algorithms for automated generation of design solutions methods of formal procedures for mathematical analysis and synthesis, effective methods and algorithms for analyzing and optimizing design solutions at all stages design. Developed on the basis of decision theory and system analysis of the methodology for the formation of the technical appearance of the BTSVS at the stage of its preliminary design in conjunction with the study of project procedures how automation objects provided the ability to create an adequate description of the synthesis process of a bcws in the conditions of multicriteriality of the system parameters and real production. Outlined in various chapters of the thesis made organizational, technical, mathematical, software, information and linguistic support of CAD research stages design bcws, whose main task is to provide variant analysis when developing the concept of the designed system with the subsequent choice final draft. All the results obtained in the work found practical application and formed the theoretical and methodological basis for creation of integrated computing systems in instrument making in general and, in Particularly in aviation instrumentation. Industrial exploitation developed provisions confirmed the correctness of the theoretical principles and methods considered in the thesis, and showed their high efficiency, providing increased productivity for designers, technicians economic level projects in the manufacture of onboard equipment.
List of sources
- Агеев В. В., Андросов В. А., Антонов И. К. и др. Стендово-имитационная среда для отработки комплексов бортового оборудования // Мир авиони-ки. 2003. №5. С. 30—35.
- Айвазян С. А., Енюков И. С., Мешалкин Л. Д. и др. Прикладная статистика. Исследование зависимостей: Справ, изд. / Под ред. С. А. Айвазяна. М.: Финансы и статистика. 1985. 487с.
- Андреев А. Г. Проблемы реструктуризации и корпоративные НИОКР // Мир авионики. 2000. №3. С. 12—14.
- Андреев Л. В., Богословский С. В., Видин Б. В., Жаринов И; О., Жаринов О. О. Парамонов П. П., Шек-Иовсепянц Р. А. Межсамолетная навигация группы летательных аппаратов // Известия вузов. Приборостроение. 2009. Т. 52. №11. С. 12—15.
- Анцев Г. В. Принципы построения бортовых информационно-управляющих систем высокоточного оружия нового поколения // Радиотехника. 2001. № 8. С. 81—86.
- Аоки М. Введение в методы оптимизации. М.: Наука. 1977. 344 с.
- Архитектура многопроцессорных вычислительных систем: Учеб. пособие / О. С. Козлов, Е. А. Метлицкий, А. В. Экало // Под ред. В. И. Тимохина. Л.: Изд-во Ленингр. ун-та. 1981.104 с.
- П.Баглюк С. С. Модель процесса передачи данных между прикладными уровнями распределенной вычислительной системы // Известия вузов. Приборостроение. 2008. Т. 51. №5. С. 15—21.
- Уэйкерли Д. Проектирование цифровых устройств / Д. Уэйкерли. – М.: Постмаркет, 2002. – Том 2. – 528 с.
- Баханов Л. Е. Принципы боевого управления истребителем, обеспечивающего реализацию возможности авиационного комплекса // Вопросы авионики. 2005. вып.2 (16). С. 39—48.
- Белов В. П., Белов В. В. Структура информационных технологий обеспечения аналитической деятельности // Проблемы информатизации. 1999. №2. С. 12—15.
- Н.Белокуров С. В. Задача выбора оптимальных вариантов на основе вероятностного подхода // Вестник ВГТУ. Сер: Радиоэлектроника и системы связи. 2006. №7. С. 59—62.
- Белокуров С. В. Модели выбора недоминируемых вариантов в численных схемах многокритериальной оптимизации. Воронеж: Научная книга. 2005. 199 с.
- Беломытцев В. Приборные корпуса Schroff: смена поколений // Современные технологии автоматизации. 2007. №2. С. 8—12.
- Березкин В. Е., Каменев Г. К., Лотов А. В. Гибридные адаптивные методы аппроксимации невыпуклой многомерной границы Парето // Журнал вычислительной математики и математической физики. 2006. Т. 46, №11, С. 2009—2023.
- Богатырев В. А. К распределению функциональных ресурсов в отказоустойчивых многомашинных вычислительных системах // Приборы и Системы. Управление, Контроль, Диагностика. 2001. №12. С. 1—5.
- Бомер М. А., Мурин А. В., Соколов О. В., Чуянова Е. Г. Методические вопросы оценки показателей надежности резервированных систем // Информационные технологии в разработках сложных систем. 2005. вып.1 (13). С. 37—53.
- Борисов Ю. И. Отечественная электронная промышленность и компонентная база. Перспективы развития // Электроника: НТБ. 2006. №2. С. 6—9.
- Вальковский В. А. Распараллеливание алгоритмов и программ. Структурный подход. М.: Радио и связь. 1989. 176 с.
- Васьковский С. В. Об одном подходе к построению интегрированной информационно-вычислительной сети // Датчики и системы. 2004. №3. С. 36—38.
- Ватутин Э. И., Зотов И. В. Аппаратная модель для определения минимального числа блоков при декомпозиции параллельных алгоритмов логического управления // Известия вузов. Приборостроение. 2008. Т. 51. №2, С. 39—43.
- Ведерников Ю В. Некоторые подходы к решению задачи выбора сложных систем на основе нечетких отношений предпочтения // Мехатроника, автоматизация, управление. 2008. №6. С. 6—11.
- Видин Б. В., Жаринов И. О., Жаринов О. О. Декомпозиционные методы в задачах распределения вычислительных ресурсов многомашинных комплексов бортовой авионики // Информационно-управляющие системы. 2010. №1. С.2—5.