
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор существующих разработок
- 4. Обоснование принятого направления разработки САУ водоотливной установкой
- 5. Методика решения задачи и текущие результаты
- Выводы
- Список источников
Введение
Водоотливная установка – это комплекс технических средств для удаления воды из горных выработок и выдачи ее на поверхность. Водоотлив горных предприятий является важным элементом всего комплекса горнотехнического оборудования, и его надежная работа во многом определяет бесперебойность и безопасность ведения горных работ по добыче полезных ископаемых [1]. Как и любая другая важная система обеспечения, она требует экономически обоснованных технических решений на этапах её проектирования и автоматизации.
Шахтная водоотливная установка представляет собой сложное сооружение, включающее в себя: комплекс горных выработок, насосные агрегаты различной производительности, трубные коллекторы, систему электроснабжения и аппаратуру автоматизации. Она должна обеспечивать откачку воды из горных выработок, обладая при этом высокой надежностью и экономичностью. Откачиваемая вода после подъема на поверхность и последующей очистки может быть использована для технологических нужд. Для обеспечения надежности водоотлив проектируют с запасом по емкости водосборника и резервом насосных агрегатов, обеспечивается резервирование электроснабжения и дублирование трубопроводов [2].
Учитывая многообразие типов водоотлива, разнообразие гидрогеологических и горнотехнических условий шахт и рудников, для автоматизации этого процесса используется, как правило, серийная аппаратура [3].
Для повышения эффективности этой аппаратуры целесообразно переводить её на современную элементную базу с применением средств вычислительной техники.
1. Актуальность темы
Водоотливные установки горных предприятий, отрабатывающих обводненные участки, представляют собой сложный энергомеханический комплекс, автоматизация которого очень актуальна.
На рисунке 1 представлена гидравлическая схема работы насосного агрегата при откачке воды из водосборного колодца, где 1 – приемный колодец; 2 – подводящий трубопровод, оборудованный приемной сеткой ПС (предохраняющей от поступления в трубопровод твердого крупностью большей, чем 0.3-0.5 ширины выходной щели рабочего колеса) и обратным клапаном ОК (который препятствует вытеканию воды из проточной части основного насоса при заливке); 3 – насос; 4 – нагнетательный трубопровод с обратным клапаном ОК (служащий для сохранения воды в нагнетательном трубопроводе при стоянке насосов, недопущения обратного движения воды при остановке насосов и защиты насоса от гидравлического удара при внеплановой остановке), регулировочной задвижкой ЗР с приводом ПЗ (служащей для изменения режимов работы агрегата) и концевыми выключателями положения КВО, КВЗ; Qт – расходомер, установленный на подводящем трубопроводе; hт – уровнемер, расположенный в приемном колодце водосборника [3].
Рисунок 1 – Технологическая схема насосной установки главного водоотлива шахты (анимация: 8 кадров, бесконечный цикл повторения, 8 килобайт)
Экономичная и надежная работа водоотливной установки во многом определяется условиями фактического режима работы насоса на внешнюю сеть, которые в процессе эксплуатации постоянно изменяются вследствие повышенного износа оборудования при перекачке вод со взвесями, кислых вод, «зарастании» элементов трубопроводной сети, кавитационных явлений, зашламления водосборных емкостей. В результате совокупного воздействия этих факторов изменяются рабочие параметры насосной установки: подача, напор, к.п.д., что в свою очередь приводит к перерасходу электроэнергии на водоотлив [3-5].
На режим работы водоотливной установки оказывают влияние ряд параметров, которые определяют ее текущее состояние:
- Q – подача водоотливной установки;
- H – напор водоотливной установки;
- HВ – вакуумметрическая высота всасывания;
- HГ – геодезическая высота нагнетания;
- N – мощность водоотлива;
- Е – удельные энергозатраты водоотлива;
- η – коэффициент полезного действия водоотлива;
- QП – часовой приток шахты;
- ρ – плотность жидкости;
- dВ – диаметр всасывающего трубопровода;
- dН – диаметр нагнетательного трубопровода;
- LВ – длина всасывающего трубопровода;
- LН – длина нагнетательного трубопровода;
- αВ – гидравлическое сопротивление всасывающего трубопровода;
- αН – гидравлическое сопротивление нагнетательного трубопровода.
Анализ влияния этих параметров на режим работы водоотлива показывает его неоднозначность. Каждый параметр определенным образом влияет на рабочий режим водоотлива, однако, можно выделить три группы параметров: условно-постоянные, возмущающие, управляемые.
Условно-постоянные параметры или остаются неизменными, или незначительно и медленно изменяются в процессе эксплуатации. К данной группе параметров относятся такие технические характеристики водоотлива, как dВ, dH, LВ, LH, N, η, HВ, HГ, которые определяют собственные динамические свойства объекта управления и применяются при определении постоянных времени и коэффициентов передачи элементов водоотлива.
Управляемые параметры – это такие переменные, воздействие на которые позволяет получать требуемые режимы работы объекта управления. Для водоотливной установки это следующие переменные: Q, H. Как известно, водоотливные установки угольных шахт, как правило, оснащаются центробежными секционными насосами. В этом случае управляемые параметры Q, H взаимосвязаны. Это приводит к тому, что при воздействии на один из управляемых параметров будут изменяться и другие управляемые параметры. Поэтому необходимо учитывать эту особенность при разработке принципов управления водоотливом.
На водоотливную установку действует такое возмущающие воздействие, как часовой приток шахты QП.
Рабочий режим водоотливной установки графически определяется точкой пересечения рабочих характеристик насоса и нагнетательного трубопровода. Приведенные на рисунке 2 рабочие параметры насосной установки Qр и Hр являются основными параметрами и относятся к управляемым. Однако режим работы водоотливной установки определяется всеми рассмотренными параметрами.
Точка А на рисунке 2 обозначает расчетный режим работы насоса с характеристикой HН=f(Q) на напорный трубопровод с характеристикой HТ=f(Q). Однако в процессе эксплуатации происходит изменение рабочего режима и его параметров из-за воздействия рассмотренных возмущений и под действием внешних условий. Поэтому получаем не рабочую точку, а рабочую область ABCD – рисунок 3.
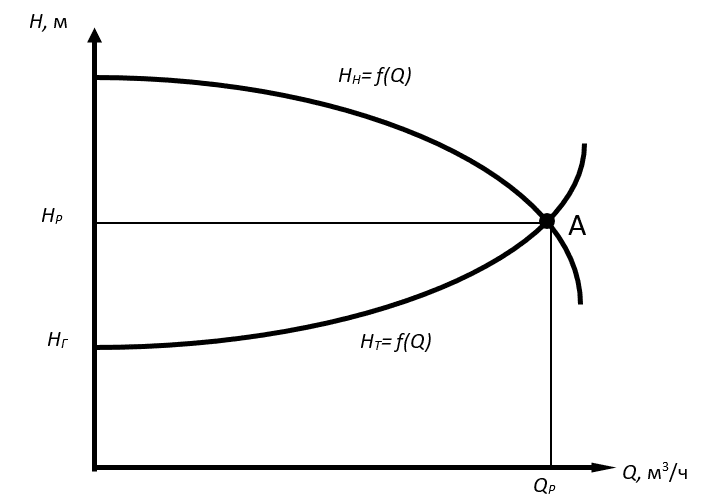
Рисунок 2 – Рабочий режим водоотливной установки
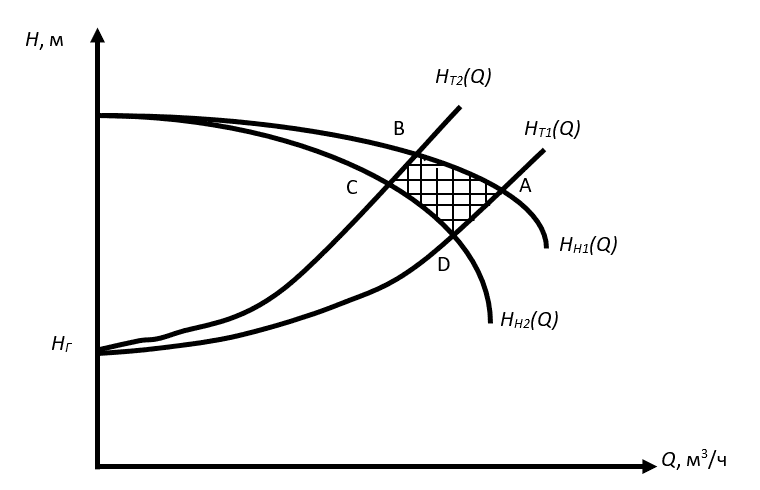
Рисунок 3 – Рабочая область водоотливной установки
В результате анализа объекта управления – главной водоотливной установки шахты – были выявлены такие основные проблемы, требующие проектирования системы автоматизации, как: непостоянство подачи и напора водоотливной установки; колебательность давления воды, необходимость непосредственного человеческого вмешательства для изменения уставки существующей системы понижения давления воды. Как следствие, эти проблемы повлекли за собой перерасход электроэнергии, а также снижение надежности и срока эксплуатации водоотливной установки из-за чрезмерной нагрузки.
Система автоматического управления позволит оптимизировать процессы поддержания основных технологических параметров, увеличить надёжность водоотливной установки, снизить затраты на её содержание и обслуживание, а также расходы на электроэнергию.
2. Цель и задачи исследования, планируемые результаты
Цель – обеспечение надежности и экономичного функционирования процесса водоотлива, что позволит исключить затопление горных выработок и создать безопасные условия для ведения горных работ.
Основные функции, выполняемые САУ:
- плавный пуск и остановка насоса на закрытую задвижку;
- управление задвижкой (для исключения гидроударов и забросов давления) при пуске и остановке насосного агрегата;
- автоматическое включение в работу вспомогательного рабочего агрегата при достижении водой верхнего уровня и непрерывную его работу до нижнего уровня;
- автоматическое включение в работу резервного насосного агрегата, если отказал основной насос или он не справляется с притоком и вода достигла аварийного уровня;
- аварийный останов насоса при снижении или потере подачи;
- автоматический контроль основных технологических параметров водоотливной установки – подачи, напора, уровней воды в водосборнике;
- обеспечение оптимального энергопотребления.
3. Обзор существующих разработок
В настоящее время в угольной промышленности для автоматизации водоотливов наиболее часто применяются системы автоматического управления ВАВ, ВАВ-1м [6].
Взрывобезопасная аппаратура типа ВАВ предназначена для автоматического управления водоотливными установками, имеющими до девяти насосных агрегатов с высоко- и низковольтными двигателями.
Аппаратура ВАВ снабжена блокировками, предотвращающими: пуск агрегата при незалитом насосе, включение привода задвижки до пуска насосного агрегата, останов агрегата до момента полного закрытия задвижки, включение агрегата при отсутствии воды в водосборнике, а также повторное включение отключившегося насоса, до выяснения причин аварии. Предусмотрены следующие виды защит, вызывающие аварийный останов: при снижении или потери производительности, при перегреве подшипников, при исчезновении напряжения или коротком замыкании в цепях управления.
Уровень воды в водосборнике контролируется с помощью датчиков уровня. Высота подвеса датчиков выбирается таким образом, чтобы число пусков и остановок насосов в сутки было минимально. При достижении водой датчика верхнего уровня включается один из насосов рабочей группы. Если, несмотря на это, уровень воды в водосборнике повышается, то вода поднимается до датчика повышенного уровня, который включает второй насос рабочей группы. При снижении воды до датчика нижнего уровня происходит отключение насосов, после чего уровень воды начинает повышаться, пока не сработает датчик верхнего уровня и процесс повторяется. Датчик аварийного уровня сигнализирует диспетчеру о недопустимо высоком уровне воды в водосборнике. Сигнал об аварийном отключении насоса формируется системой защиты, при его появлении схема управления обеспечивает включение насоса резервной группы. Информация об уровне воды в водосборнике и состоянии насосных агрегатов, а также сигнализация об аварии, выводится на пульт диспетчера [7].
Аппаратура ВАВ-1м является наиболее современной, с наибольшим набором выполняемых функций. Унифицированная взрывобезопасная аппаратура автоматизации водоотливных установок ВАВ-1м предназначена для автоматического, дистанционного и местного управления главными водоотливными установками горных предприятий.
В аппаратуре ВАВ-1м предусмотрено:
- автоматическое, дистанционное и местное управление работой насосов, их автоматическая заливка перед пуском;
- автоматический переход на последующий насос при неисправности рабочего;
- цикличность работы насосов, последовательность их запуска и остановки при параллельной работе;
- запрет пуска неисправного насоса;
- учет машинного времени работы насосов;
- автоматическое управление приводом задвижки;
- возможность автоматического или ручного запрета пуска насосов на время максимума энергопотребления;
- индикация информации об уровне воды в водосборнике, о работе насосов и их неисправности с расшифровкой вида неисправности, о машинном времени работы каждого насоса.
Анализ функциональных возможностей систем автоматизации ВАВ и ВАВ-1м показывает отсутствие функций управления водоотливной установкой в динамических режимах. Неуправляемое течение переходных процессов приводит к резкому повышению давления, скачкам и пульсациям давления, а иногда – и к гидравлическим ударам. Совместное воздействие перечисленных явлений на проточную часть водоотливной установки вызывает интенсивный износ оборудования водоотлива, что снижает долговечность, надежность, безопасность данного технологического процесса.
4. Обоснование принятого направления разработки САУ водоотливной установкой
Оптимальной для исследуемой водоотливной установки является концепция замкнутой системы с обратной связью, приведенная на рисунке 4.
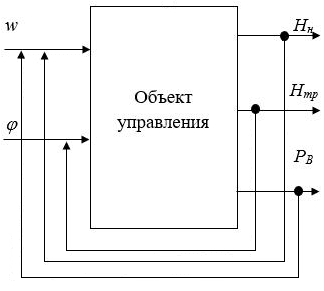
Рисунок 4 – Концепция структурной схемы создаваемой системы
Объектом управления выступает водоотливная установка, выходными переменными которой являются напорная характеристика насоса НН, напорная характеристика трубопровода Нтр и мощность РВ, потребляемая водоотливом. Управление выходными переменными осуществляется с помощью задвижки, главным параметром которой служит угол её открытия φ и может изменяться в пределах от 0 до 90 градусов, и частоты вращения приводного электродвигателя w. При отклонении напорной характеристики трубопровода от номинального режима работы формируется сигнал рассогласования в цепи и меняется угол поворота задвижки. При отклонении напорной характеристики насоса и мощности от номинального режима работа формируется сигнал рассогласования в цепи и меняется частота вращения двигателя [8-9].
Исходя из проведенного анализа системы автоматического управления объектом, была составлена следующая его функциональная схема, приведенная на рисунке 5.
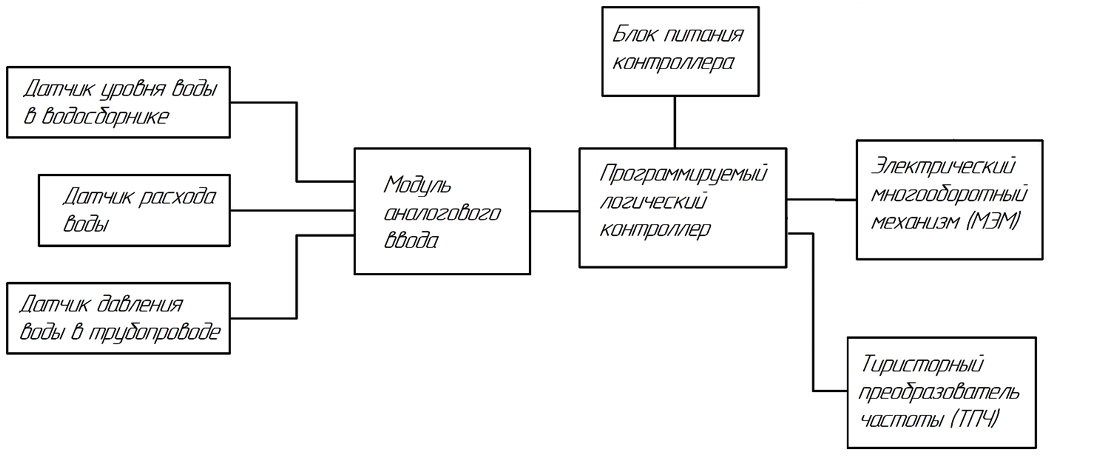
Рисунок 5 – Функциональная схема технических средств САУ
Из схемы видно, что аналоговые сигналы от датчиков уровня воды в водосборнике, расходов воды и давления воды в трубопроводе поступают на модуль аналогового ввода, который подключается к ПЛК. Контроллер, руководствуясь заблаговременно установленным в него алгоритмом управления, формирует управляющее воздействие на привод, управляющий задвижкой, стоящей на трубопроводе, и преобразователь частоты. При несоответствии заданного напора и существующего формируется сигнал рассогласования, который с выхода ПЛК поступает на исполнительный механизм. Согласно алгоритму плавного запуска ПЛК выдает управляющие воздействия на соответствующие тиристорные преобразователи частоты. Преобразователи частоты меняют требуемым образом частоту оборотов двигателя соответствующего насоса и таким образом осуществляется необходимое регулирование производительности насосной установки. После плавного запуска насосной установки (окончание запуска фиксируется по величине напора на закрытой задвижке) ПЛК выдает управляющие воздействия на открытие задвижки соответствующего насоса.
5. Методика решения задачи и текущие результаты
Для предложенных решений необходимо определить алгоритмы управления по рассмотренным контурам управления. На рисунке 6 приведена модель САУ водоотливной установкой с ПИД-регулятором во внешнем контуре стабилизации напора насоса.
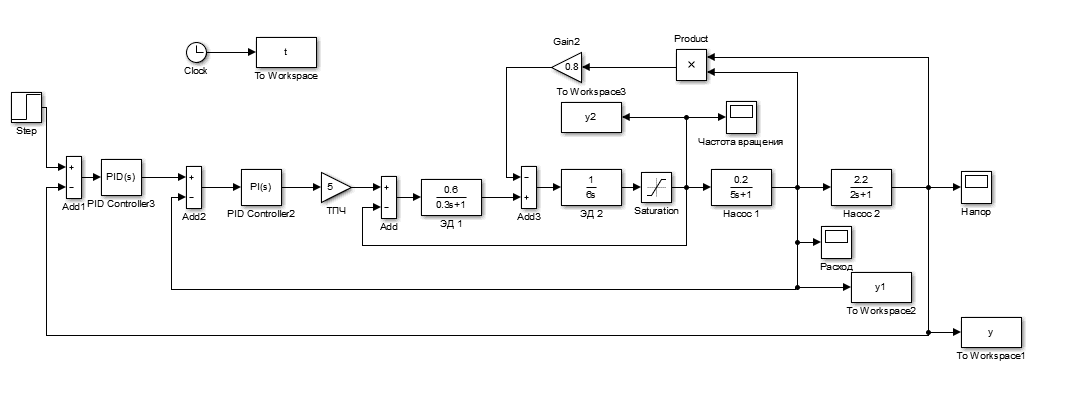
Рисунок 6 – Модель САУ водоотливной установкой
ПИД-регулятор обладает тремя параметрами настройки: коэффициент усиления регулятора kр, время интегрирования Tи, время дифференцирования Tд. Его передаточная функция имеет вид [10]:
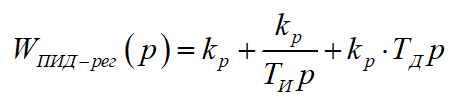
Для расчета настроечных параметров регуляторов применим инструментальные средства Matlab – блок PID Controller, в окне которого были подобраны его коэффициенты.
Подобрав оптимальные параметры для ПИД-регулятора получаем переходные характеристики напора насоса (рис.7), подачи насоса (рис.8) и частоты вращения приводного электродвигателя (рис.9).
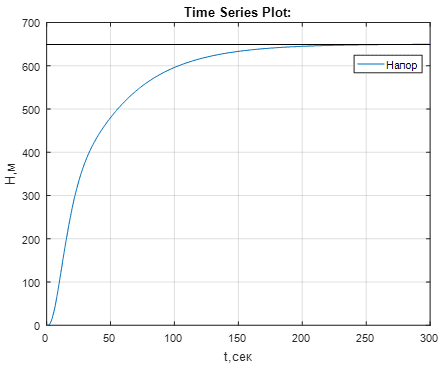
Рисунок 7 – Переходная характеристика напора насоса с ПИД-регулятором во внешнем контуре стабилизации напора насоса
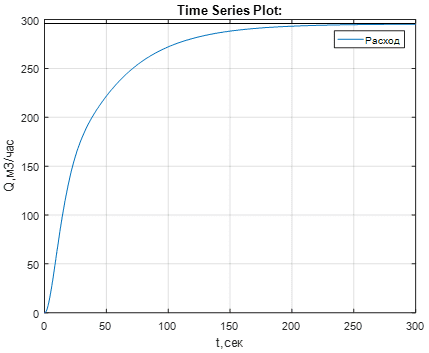
Рисунок 8 – Переходная характеристика расхода с ПИД-регулятором во внешнем контуре стабилизации напора насоса
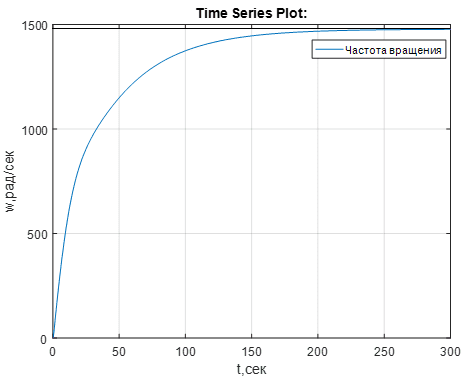
Рисунок 9 – Переходная характеристика частоты вращения приводного электродвигателя с ПИД-регулятором во внешнем контуре стабилизации напора насоса
Анализ полученных переходных характеристик (рис.6 – рис.8) показывает удовлетворительное качество регулирования. Регулятор напора стремится стабилизировать заданный напор насоса на выходе, отрабатывает в течение 300 секунд, не выходя за допустимый диапазон по напору 650 м, что соответствует предъявляемым требованиям к системе. Регулятор расхода стремится стабилизировать заданную подачу насоса, не выходя за допустимый диапазон по подаче 300 м3/час. Частота вращения приводного электродвигателя также не выходит за допустимый диапазон 1500 об/мин. При этом отсутствует перерегулирование, а установившаяся ошибка равна нулю.
Выводы
В качестве объекта управления была рассмотрена водоотливная установка угольной шахты.
Анализ параметров, влияющих на рабочий режим водоотливной установки, позволил составить структурную схему объекта управления. Управляющими воздействиями были приняты угол поворота задвижки и частота вращения приводного электродвигателя. Выходными параметрами выступают напорная характеристика насоса, напорная характеристика трубопровода и мощность, потребляемая водоотливом.
С помощью встроенных средств подстройки пакета Matlab Simulink были рассчитаны коэффициенты ПИ- и ПИД-регуляторов. Качество переходного процесса с использованием таких регуляторов полностью удовлетворяет пользователя ввиду отсутствия статической ошибки и перерегулирования.
При написании данного реферата магистерская работа ещё не завершена. Окончательное завершение: июнь 2019 года. Полный текст работы и материалы по теме могут быть получены у автора или его научного руководителя после указанной даты.
Список источников
- Гейер В.Г., Тимошенко Г.М. Шахтные вентиляторные и водоотливные установки. / В. Гейер, Г. Тимошенко. – М.: Недра, 1987.– 270 с.
- Попов В.М. Рудничные водоотливные установки. – 2-е изд., перераб. и доп. / Попов В.М. – М.: Недра, 1983. – 304 с.
- Иванова А.А. Автоматизация процессов подземных горных работ. Под общей ред. / Иванова А.А. – Киев; Донецк: Вища шк., 1987. – 327 с.
- Толпежников Л.И. Автоматическое управление процессами шахт и рудников: Учебное пособие для вузов. – 2-е изд., перераб. и доп. / Толпежников Л.И. – М.: Недра, 1985. – 352 с.
- Гаврилов П.Д. Автоматизация производственных процессов. Учебник для вузов. / Гаврилов П.Д., Гимельштейн Л.Я., Медведев А.Е. – М.: Недра, 1985. – 215 с.
- Тимошенко Г.М. Научные основы проектирования и эксплуатации насосных установок в переходных режимах. / Тимошенко Г.М. – Киев; Донецк: Вища шк. Головное изд-во, 1986.– 127 с.
- Денисенко В. В. ПИД-регуляторы вопросы реализации часть 2 / Денисенко В. В. – М.: СТА 2008. № 1. с 86-99
- Зайцев Г.Ф. Теория автоматического управления и регулирования. / Зайцев Г.Ф. – Киев: Вища школа, 1988 – 431 с.
- Лукас В. А. Теория автоматического управления. / Лукас В. А. – М.: Недра, 1990. – 416 с.
- Дорф Р., Бишоп Р. Современные системы управления. / Р. Дорф, Р. Бишоп – М.: Лаборатория Базовых знаний – 2002 – 832 с.