
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Цель и задачи исследования
- 3. Різновиди багаторівневих паркінгів
- 4. Принцип роботи автоматизованого паркінгу
- 5. Математична постановка задачі
- 6. Огляд методів і алгоритмів
- 6.1 Огляд методу повного перебору
- 6.2 Огляд методу пріоритетів
- 6.3 Огляд методу послідовних поступок
- Висновки
- Список джерел
Вступ
Автоматизовані системи паркування мають такі переваги, як унікальне програмне забезпечення, передові технології з зчитування номерів, запис і зберігання відео, і т. д. Система автоматизованої парковки є максимально доступним і зручним варіантом для використання на підприємствах з великим навантаженням транспортного руху. Завдяки особливому програмного забезпечення інтеграція можлива практично на будь-яких об'єктах: аеропортах і вокзалах; торгових, розважальних і бізнес центрах; спортивних комплексах.
Автоматизована система паркування практично виключає необхідність участі в її роботі співробітників у процесі функціонування системи тим самим, виключаючи людський фактор. Винятком є обслуговування обладнання. Повністю автоматичні системи будуть особливо актуальні при інтенсивному трафіку в'їзду / виїзду транспортних засобів.
1. Актуальність теми
В даний час пошук вільного місця на паркінгу є однією з актуальних проблем сьогодні. Паркінг – це сховище, будівля (його частина) або багатоярусна площадка, призначена для зберігання транспортних засобів.
Дефіцит паркувального простору висуває завдання комплексного рішення управління парковками. Це призводить до пошуків нових рішень, націлених на збільшення ефективності функціонування автомобільних парковок. У статті проведено короткий огляд об'єкта дослідження, наводяться основні проблеми їх застосування та шляхи вирішення. Оптимізація роботи паркінгу є одним з основних елементів, що визначають якість і зручність організації паркування. Тому впровадження комп'ютеризованої підсистеми дозволить відвідувачам легко і швидко орієнтуватися на великих заповнених автомобілями паркінгах [1].
Актуальність теми роботи зумовлена тим обставиною, що в умовах неможливості розширення паркінгу, збільшити його пропускну здатність і відповідно ємність можна лише за рахунок впровадження більш ефективного засобу автоматизації.
2. Мета і завдання дослідження
Метою дослідження є розгляд варіантів систем парковок і виявлення способів оптимізації роботи паркінгу, а саме оптимізація пошуку вільного місця за мінімальний час і побудова мінімального маршруту.
ля досягнення мети були поставлені наступні завдання
- Виконати аналіз існуючих систем автоматизації паркування.
- Виявити проблеми, які є при існуючих системах автоматизації паркінгів.
- Розв'язати задачу пошуку вільних місць на парковці.
- Визначити оптимальне місце парковки автомобіля.
- Забезпечити контроль зайнятості кожного паркувального місця.
- Виявлення автомобіля за допомогою валідаторів, які моментально визначати місцезнаходження машини;
Об'єктом дослідження є автоматизований багаторівневий
Предмет дослідження є пошук оптимального місця паркування автомобіля за обраним критерієм.
3. Разновидности многоуровневых паркингов
Автоматизованi системи паркування дозволяють розмістити більше автомобілів на меншій площі, відмовившись від атрибутів класичного паркінгу: під'їзних шляхів, пандусів, пасажирських ліфтів і сходів, звільнивши місця для головного – паркування автомобілів. Автоматизовані системи паркування істотно підвищує коефіцієнт заповнення порожнього простору при парковці, в тому числі в комбінованих об'єктах (житлові, торгові та офісні площі).
Об'єктом дослідження є автоматизований багаторівневий паркингАвтоматизированные системи паркування дозволяють розмістити більше автомобілів на меншій площі, відмовившись від атрибутів класичного паркінгу: під'їзних шляхів, пандусів, пасажирських ліфтів і сходів, звільнивши місця для головного – паркування автомобілів. Автоматизовані системи паркування істотно підвищує коефіцієнт заповнення порожнього простору при парковці, в тому числі в комбінованих об'єктах (житлові, торгові та офісні площі). Першими в еволюції вертикальних парковок стали підземні і наземні рамповые багатоповерхові паркінги які дозволяють використовувати ліфтові підйомники, механізовані і автоматизовані підйомники і маніпулятори [2]..
За способом управління автоматизовані парковки бувають напівавтоматичними і автоматичними. Автоматичні парковки функціонують без участі операторів на відміну від напівавтоматичних. Однак при цьому необхідна складна система управління з додатковим програмним забезпеченням, що виключає збій при прийманні та видачі автомобіля (мал. 1)[3].

Малюнок 1 – Багаторівневий паркінг
(анимацiя: 6 кадрiв, 5 циклiв повторення, 112 кiлобайт)
За характером розташування парковки умовно можна розділити на парковки структурні, осередкові, гостьові і перехоплюючі.
Парковка осередкова-механічний пристрій для переміщення і зберігання автомобілів в осередках. Прибув автомобіль ставиться в спеціальний механізм – приймач, який переміщує його у вільну комірку і зберігає, поки власник не повернеться за ним.
Парковка Гостьова–організовується додатково до будь–якого з згадуваних видів парковки поруч з житловим комплексом, офісом або на території котеджного селища для розміщення автомобілів гостей.
Одним з можливих шляхів вирішення проблеми пробок – будівництво перехоплюючих парковок у вогнищах загострення транспортної проблеми, пропонують всім бажаючим можливість оренди машино – місць на як завгодно короткий відрізок часу.
Автоматизовані багаторівневі парковки по конструктивному виконанню діляться на: карусельні, модульні, баштові і у вигляді циліндрів [4].
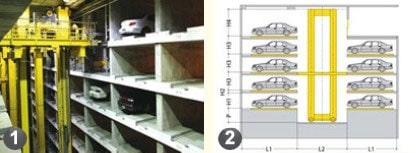
Карусельна парковка займає площу двох автомобілів (мал. 2), дозволяє паркувати до 12 машин.

Малюнок 2 – Карусельна парковка: 1 – загальний вигляд 2 – парковка без тенту 3 – парковка c тентом
Механізовані парковки мозаїчного типу-це вид парковки, в якій передбачаються різні види комбінацій перегрупування місць, щоб прискорити Паркувальні операції. Цей вид паркування можна використовувати як в місцях великого скупчення автомобільного транспорту (транспортний вузол, двори житлових будинків і т. д.), де гостро стоїть проблема нестачі місць для стоянки автомобілів. В системі за допомогою маніпулятора здійснюється одночасне вертикальне і горизонтальне переміщення автомобіля (мал. 3).
Малюнок 3 – Модульная парковка: 1 – розміщення автомобілів в бокси; 2 – поперечний розріз;
В'їзд і виїзд на парковку може бути встановлений на будь-якому з рівнів паркування, що дозволяє раціонально використовувати наземне і підземне простір під парковку. Застосування поворотної паркувальної платформи на рівні в'їзду – виїзду дозволяє значно спростити процес видачі автомобіля з автоматизованої стоянки. Механізована парковка баштового типу – це стелажна парковка, яка передбачає велику кількість поверхів і відносно малу опорну площу. Ця парковка з вертикальними рядами і місцями зберігання машин, а також передбачений простір для переміщення автомобілів. Баштовий тип схожий по пристрою з ліфтами. Водієві достатньо лише заїхати на платформу, після чого він може покинути свій автомобіль. Після ліфтова система піднімає машину на найближче вільне місце(мал. 4).
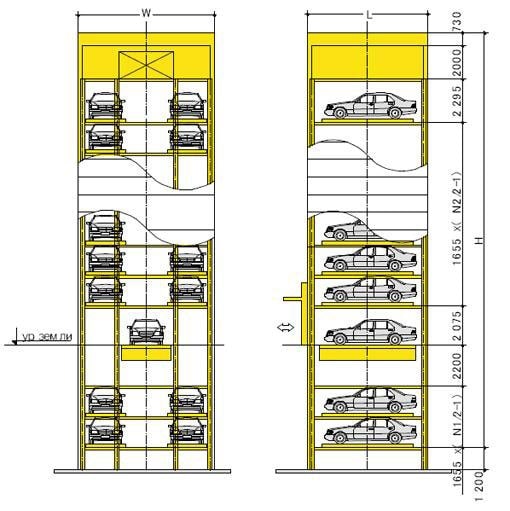
Малюнок 4 – Баштова парковка
4. Принцип роботи автоматизованого паркінгу
В автоматизованих системах паркування автомобілі, приймаються на зберігання, через спеціальне приміщення і подаються на механізоване пристрій, яке, в свою чергу, в автоматизованому режимі за певним алгоритмом без участі людини забезпечує компактне розміщення автомобілів в обслуговуваному їм паркувальному просторі. Принцип роботи полягає в точному визначенні розташування вільних і зайнятих місць та/або в підрахунку кількості в'їхали і виїхали машин.
Системи багаторівневих парковок повністю автоматизовані і являють собою цілий комплекс, що складається з комп'ютерної техніки, датчиків руху, датчиків сканування, камер відеоспостереження, механізмів для підйому і зняття автомобілів.
За способом розміщення автомобілів багаторівневі парковки можуть бути горизонтальними і вертикальними. Відмінних рис ці два види парковок практично не мають. Різниця полягає тільки в позиціях автомобілів при їх розміщенні на парковках. Таким чином, автомобілі можуть бути поставлені на Бічне місце або на вертикальне місце.
Розглянемо весь процес розміщення автомобіля на автоматизованих парковках.
Автомобіль заїжджає на паркувальну рампу і повністю глушить мотор. В обов'язковому порядку автомобіль повинен залишатися на ручному гальмі. Після цього водій покидає авто і закриває його. Далі машині присвоюється ідентифікатор з унікальним номером і ключ-картка зі спеціальним паролем.
Основою роботи такої парковки виступає центральний комп'ютер. На всій площі будівлі встановлюються камери, механічні компоненти і потрібні датчики. Це дозволяє легко переміщати автомобілі по всій паркувальної площі.
На парковках встановлюється горизонтальний або вертикальний підйомник в залежності від транспортувальних особливостей на даній конкретній парковці. Виходячи з назви, відрізнятися вони будуть в положенні кузова в просторі. Вбудовані датчики сканування визначають розміри і вагу автомобіля. Після цього механічний підйомник піднімає автомобіль і розміщує його на вільне підходяще місце. Система самостійно визначає вільні місця, відповідно до цього вибираючи найбільш оптимальне місце розташування.
Як правило, даний процес транспортування автомобілів займає не більше 3-х хвилин. Завдяки наявності поворотних механізмів, автомобіль буде розгорнутий так, щоб водієві не довелося виїжджати з парковки заднім ходом.
Після транспортування автомобіля водій отримує ключ або карту, які можуть мати секретний код. Даний код є своєрідним ідентифікатором автомобіля і його місця розташування на парковці.
Для того щоб забрати автомобіль, водій пред'являє карту або ключ, які скануються системою, після чого механічний підйомник "передає" автомобіль його власнику [5].
5. Математична постановка задачі
Паркування можна уявити і математично описати у вигляді матриці містить деякої число рядкі M і деякої число стовпців N, де кожен елемент матриці тобто осередок зберігає координати фізичного паркувального місця P1(x1;y1), P2(x2;y2),…Pn(xn;yn). ак само осередок (паркувальне місце) має два стани: вільна (True) і зайнята (False).
На цій парковці є пересувний ліфт у якого є своя швидкість руху як в горизонтальному Vg так і у вертикальному Vv пересуванні.
Необходимо определить положение ячейки парковочного места, куда можно поместить машину. Для этого оцениваем значение фрагментации (загрузки) паркинга и определяем ячейку, время перемещения к которой будет минимальным. Таким образом, необходимо найти такую свободную ячейку которая бы удовлетворяла двум критериям поиска места:
Необхідно визначити положення осередку паркувального місця, куди можна помістити машину. Для цього оцінюємо значення фрагментації (завантаження) паркінгу і визначаємо осередок, час переміщення до якої буде мінімальним. Таким чином, необхідно знайти таку вільну комірку яка б задовольняла двом критеріям пошуку місця:
- Забезпечення рівномірного завантаження (значення фрагментації)
Рівномірність – це відстань центру мас (xc, yc)системи, у якій розташовуються машини до фізичної середині центру площі(мал. 6).
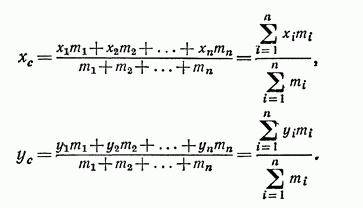
Малюнок 6 – Формула фрагментації
Де xc, yc – координати центру мас
xn, yn – координати осередків
mi – маса автомобіля
- Час переміщення (клітинка, час переміщення до якої буде мінімальним)
t=V*S
V – швидкість руху ліфта
S – відстань якої проробляє ліфт від моменту навантаження автомобіля, до паркувальної осередку.
Обчислюємо для кожної комірки значення рівномірності завантаження, якщо значення однакові, то комірка вибирається за другим критерієм (часу переміщення).
V – швидкість руху ліфта
p – щільність наповнюваності при N ярусах зберігання, яка визначається як Nreal/Nmax;
Nmax – максимальна кількість машин вписуються в обсяг стоянки;
Nreal – дійсне кількість машин, які в такій стоянці можуть бути реалізовані;
6. Огляд методів і алгоритмів
Дефицит парковочного пространства выдвигает задачу комплексного решения управления парковками. Это приводит к поискам новых решений, нацеленных на увеличение эффективности функционирования автомобильных парковок. В практической деятельности часто встречаются задачи, заключающиеся в поиске лучшего (оптимального) решения при наличии различных несводимых друг к другу критериев оптимальности. Для решения многокритериальных задач разработаны специальные методы, позволяющие из бесчисленного множества решений найти оптимальное [6].
6.1 Метод повного перебору
Повний перебір (або метод «грубої сили») – метод вирішення задачі шляхом перебору всіх можливих варіантів. Складність повного перебору залежить від кількості всіх можливих рішень задачі. Якщо простір рішень дуже велике, то повний перебір може не дати результатів протягом декількох років або навіть століть [7].
6.2 Метод приоритетов
Метод пріоритетів вирішення багатокритеріальних задач застосовується в тому випадку, коли критерії впорядковані за їх відносної важливості. На першому кроці рішення задачі відбирають безліч результатів, які мають максимальну оцінку за найважливішим критерієм. Якщо результат єдиний, то він і є оптимальним. Якщо ж результатів кілька, то серед них вибирають ті, які мають максимальну оцінку за другим по важливості критерію. Якщо знову результатів кілька, то процес повторюють для наступних критерій. Обґрунтування вибору кращого варіанту управлінського рішення за методом розстановки пріоритетів проводиться за наступним алгоритмом [9].
6.3 Метод послідовних поступок
При пошуку компромісних рішень більшу результативність може дати спосіб послідовного вибору поступок, який дозволяє оцінити можливі стратегії за кількома критеріями. Цей спосіб передбачає дослідження ряду задач оптимізації по кожному з критеріїв з одночасною зміною обмежень на величини інших.
Даний підхід використовується при вирішенні багатокритеріальних задач, в яких всі критерії можна природно ранжувати за важливістю, однак не настільки жорстко, як в лексикографічному випадку. Для вирішення подібних завдань нерідко застосуємо метод послідовних поступок.
Процедура вирішення багатокритеріальної задачі методом послідовних поступок полягає в тому, що всі приватні критерії мають і нумерують у порядку їх відносної важливості; максимізують перший, найбільш важливий критерій; потім призначають величину допустимого зниження значення цього критерію і максимізують другий за важливістю приватний критерій за умови, що значення першого критерію не повинно відрізнятися від максимального більш ніж на величину встановленого зниження (поступки); знову призначають величину поступки, але вже за другим критерієм і знаходять максимум третього по важливості критерію за умови, щоб значення перших двох критеріїв не відрізнялися від раніше знайдених максимальних значень більше ніж на величини відповідних поступок; далі подібним же чином по черзі використовуються всі інші приватні критерії; оптимальної зазвичай вважають будь-яку стратегію, яка отримана при вирішенні задачі відшукання умовного максимуму останнього по важливості критерію.
Таким чином, при використанні методу послідовних поступок багатокритеріальна задача зводиться до почергової максимізації приватних критеріїв і вибору величин поступок. Величини поступок характеризують відхилення пріоритету од них приватних критеріїв перед іншими від лексикографічного: чим поступки менші, тим пріоритет жорсткіші [10].
Висновки
На даному етапі виконання магістерської роботи були поставлені цілі і завдання розроблюваної системи, проведено аналіз існуючих видів автоматизованих паркінгів. Була сформульована математична постановка задачі.
Більшість методів вирішення не є істинно субоптимальними, так як швидкість роботи безпосередньо залежить від розміру завдання. Проте, множинні поліпшення і доопрацювання дозволяють домогтися достатнього малого часу роботи навіть при досить великих обсягах завдання.
Список источников
- Ягузинская И. Ю., Типушова И. О. Современные автоматизированные системы парковки автомобилей // Научно-методический электронный журнал «Концепт». – 2015. – Т. 35. – С. 156–160. Режим доступа: https://e-koncept.ru
- Дуванова И.А. Автомобильные стоянки и парковки в мегаполисах // Строительство уникальных зданий и сооружений. – 2015, №12 (39) Санкт-Петербургский политехнический университет Петра Великого. Режим доступа: https://docviewer.yandex.ua/view
- Июльский Д.В., Кожевников С.О. Технические решения автоматизированных стоянок для легковых автомобилей//Вестник Ивановского государственного политехнического университета. 2015. – №1(2). C.103–107. Режим доступа: https://elibrary.ru
- Парковки и паркинги. Часть 1 [Электронный ресурс] /. Электрон. текстовые дан. – Режим доступа: https://www.proektant.ru
- Типы парковок. Преимущества многоуровневых паркингов [Электронный ресурс] /. – Электрон. текстовые дан. – Режим доступа: https://pravosude.ru
- Как работают системы многоуровневых парковок [Электронный ресурс] /. Электрон. текстовые дан. – Режим доступа: https://www.znaikak.ru
- Кириллова, Н.М. Классификация подземных гаражей -автостоянока /Н.М. Кириллова. – Международный научный журнал «Символ Ураины». — 2017.
- Методы решения задачи о Коммивояжере [Электронный ресурс] /. Электрон. текстовые дан. – Режим доступа: https://poisk-ru.ru
- Методы оптимальных решений [Электронный ресурс] /. Электрон. текстовые дан. – Режим доступа: https://studfiles.net
- Разработка и исследование адаптивного поискового алгоритма для решения многокритериальных задач условной оптимизации [Электронный ресурс] /. Электрон. текстовые дан. — Режим доступа: https://vuzlit.ru