
Реферат по теме выпускной работы
На момент написания данного реферата магистерская работа ещё не завершена. Ожидаемая дата завершения – май 2019 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования
- 3. Разновидности многоуровневых паркингов
- 4. Принцип работы автоматизированного паркинга
- 5. Математическая постановка задачи
- 6. Обзор методов и алгоритмов
- 6.1 Обзор метода полного перебора
- 6.2 Обзор метода приоритетов
- 6.3 Обзор метода последовательных уступок
- Выводы
- Список источников
Введение
Автоматизированные системы парковки обладают такими преимуществами, как уникальное программное обеспечение, передовые технологии по считыванию номеров, запись и хранение видео, и т.д. Система автоматизированной парковки является максимально доступным и удобным вариантом для использования на предприятиях с большой нагрузкой транспортного движения. Благодаря особому программному обеспечению интеграция возможна практически на любых объектах: аэропортах и вокзалах; торговых, развлекательных и бизнес центрах; спортивных комплексах.
Автоматизированная система парковки практически исключает необходимость участия в ее работе сотрудников в процессе функционирования системы тем самым, исключая человеческий фактор. Исключением является обслуживание оборудования. Полностью автоматические системы будут особенно актуальны при интенсивном трафике въезда/выезда транспортных средств.
1. Актуальность темы
В настоящее время поиск свободного места на паркинге является одной из актуальных проблем сегодня. Паркинг – это хранилище, здание (его часть) или многоярусная площадка, предназначенная для хранения транспортных средств.
Дефицит парковочного пространства выдвигает задачу комплексного решения управления парковками. Это приводит к поискам новых решений, нацеленных на увеличение эффективности функционирования автомобильных парковок. В статье проведен краткий обзор объекта исследования, приводятся основные проблемы их применения и пути решения. Оптимизация работы паркинга является одним из основных элементов, определяющих качество и удобство организации парковки. Поэтому внедрение компьютеризированной подсистемы позволит посетителям легко и быстро ориентироваться на больших заполненных автомобилями паркингах [1].
Актуальность темы работы обусловлена тем обстоятельством, что в условиях невозможности расширения паркинга, увеличить его пропускную способность и соответственно емкость можно лишь за счет внедрения более эффективного средства автоматизации.
2. Цель и задачи исследования
Целью исследования является рассмотрение вариантов систем парковок и выявление способов оптимизации работы паркинга, а именно оптимизация поиска свободного места за минимальное время и построение минимального маршрута.
Для достижения цели были поставлены следующие задачи:
- Выполнить анализ существующих системам автоматизации парковки.
- Выявить проблемы, которые имеются при существующих системах автоматизации паркингов.
- Решить задачу поиска свободных мест на парковке.
- Определить оптимальное место парковки автомобиля.
- Обеспечить контроль занятости каждого парковочного места.
- Обнаружение автомобиля с помощью валидаторов, которые моментально определят местонахождение машины;
Объектом исследования является автоматизированный многоуровневый паркинг.
Предмет исследования является поиск оптимального места парковки автомобиля по выбранному критерию.
3. Разновидности многоуровневых паркингов
Автоматизированные системы парковки позволяют разместить больше автомобилей на меньшей площади, отказавшись от атрибутов классического паркинга: подъездных путей, пандусов, пассажирских лифтов и лестниц, освободив места для главного – парковки автомобилей. Автоматизированные системы парковки существенно повышает коэффициент заполнения пустого пространства при парковке, в том числе в комбинированных объектах (жилые, торговые и офисные площади).
Первыми в эволюции вертикальных парковок стали подземные и наземные рамповые многоэтажные паркинги которые позволяют использовать лифтовые подъемники, механизированные и автоматизированные подъемники и манипуляторы [2].
По способу управления автоматизированные парковки бывают полуавтоматическими и автоматическими. Автоматические парковки функционируют без участия операторов в отличие от полуавтоматических. Однако при этом необходима сложная система управления с дополнительным программным обеспечением, исключающим сбой при приёмке и выдаче автомобиля (рис. 1)[3].

Рисунок 1 – Многоуровневый паркинг
(анимация: 6 кадров, 5 циклов повторения, 112 килобайт)
По характеру расположения парковки условно можно разделить на парковки структурные, ячейковые, гостевые и перехватывающие.
Парковка ячейковая – механическое устройство для перемещения и хранения автомобилей в ячейках. Прибывший автомобиль ставится в специальный механизм – приемник, который перемещает его в свободную ячейку и хранит, пока владелец не вернется за ним.
Парковка гостевая – организуется дополнительно к любому из упоминавшихся видов парковки рядом с жилым комплексом, офисом или на территории коттеджного поселка для размещения автомобилей гостей.
Одним из возможных путей решения проблемы пробок – строительство перехватывающих парковок в очагах обострения транспортной проблемы, предлагающих всем желающим возможность аренды машино – мест на сколь угодно короткий отрезок времени.
Автоматизированные многоуровневые парковки по конструктивному исполнению делятся на: карусельные, модульные, башенные и в виде цилиндров [4 ].
.Карусельная парковка занимает площадь двух автомобилей (рис. 2), позволяет парковать до 12 машин.

Рисунок 2 – Карусельная парковка: 1 – общий вид; 2 – парковка без тента; 3 – парковка c тентом
Механизированные парковки мозаичного типа – это вид парковки, в которой предусматриваются различные виды комбинаций перегруппировки мест, чтобы ускорить парковочные операции. Этот вид парковки можно использовать как в местах большого скопления автомобильного транспорта (транспортный узел, дворы жилых домов и т.д.), где остро стоит проблема нехватки мест для стоянки автомобилей. В системе при помощи манипулятора осуществляется одновременное вертикальное и горизонтальное перемещение автомобиля (рис. 3).
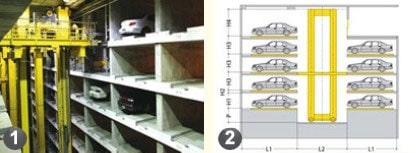
Рисунок 3 – Модульная парковка: 1 – размещение автомобилей в боксы; 2 – поперечный разрез;
Въезд и выезд на парковку может быть установлен на любом из уровней парковки, что позволяет рационально использовать наземное и подземное пространство под парковку. Применение поворотной парковочной платформы на уровне въезда – выезда позволяет значительно упростить процесс выдачи автомобиля из автоматизированной стоянки .
Механизированная парковка башенного типа – это стеллажная парковка, которая предусматривает большое количество этажей и относительно малую опорную площадь. Эта парковка с вертикальными рядами и местами хранения машин, а также предусмотренным пространством для перемещения автомобилей. Башенный тип схож по устройству с лифтами. Водителю достаточно лишь заехать на платформу, после чего он может покинуть свой автомобиль. После лифтовая система поднимает машину на ближайшее свободное место.(рис. 4).
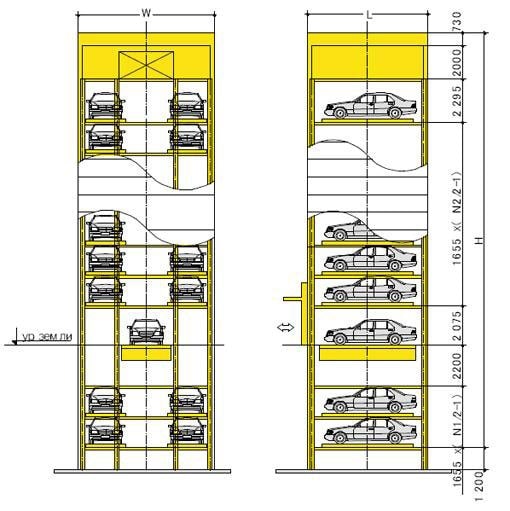
Рисунок 4 – Башенная парковка
Механизированная парковки роторного типа «цилиндр» – это системы парковки, в которых само перемещение машин осуществляется по криволинейной траектории. Преимущества механизированной парковки роторного типа: эффективное использование пространства; удобство парковки; удобство вывоза с парковки автомобиля; является легковозводимой.
Лифт – транспортер движется в центре круга и располагает по окружности автомобили на одном уровне. Возможно проектирование парковки автоматического типа под автомобили других габаритов. Основным достоинством технического решения данной парковки является возможность максимального количества размещаемых автомобилей на меньшей площади (рис. 5)[5].
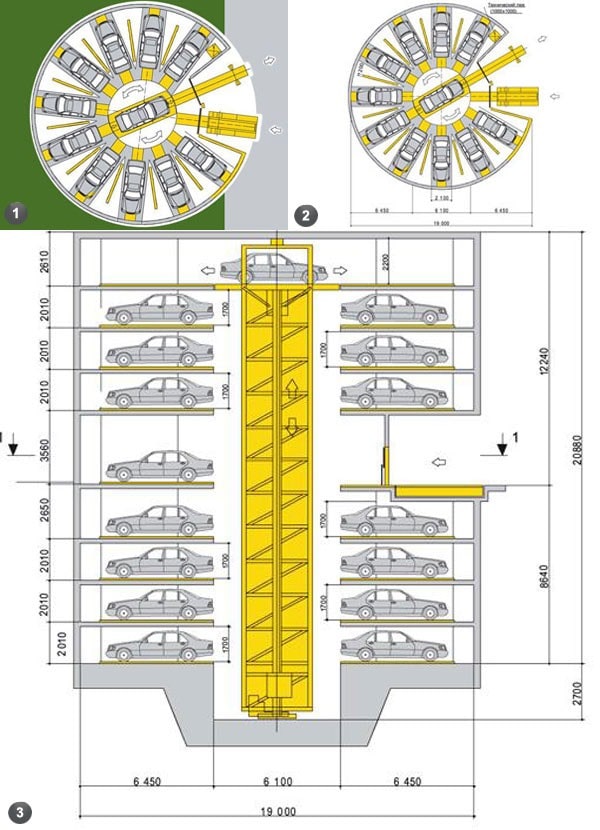
Рисунок 5 – Роторная парковка: 1 – общий вид; 2 – габариты на уровне; 3 – габариты по высоте
Помимо явных преимуществ, многоуровневые парковки имеют некоторые недостатки, к которым можно отнести:
- Возможность повреждений основных рабочих механизмов, которые способны повлечь за собой повреждения припаркованных автомобилей..
- Возможные сбои в работе парковок вследствие возникновения техногенных или экологических катастроф.
4. Принцип работы автоматизированного паркинга
В автоматизированных системах парковки автомобили, принимаются на хранение, через специальное помещение и подаются на механизированное устройство, которое, в свою очередь, в автоматизированном режиме по определенному алгоритму без участия человека обеспечивает компактное размещение автомобилей в обслуживаемом им парковочном пространстве. Принцип работы заключается в точном определении расположения свободных и занятых мест и/или в подсчете количества въехавших и выехавших машин.
Системы многоуровневых парковок полностью автоматизированы и представляют собой целый комплекс, состоящий из компьютерной техники, датчиков движения, датчиков сканирования, камер видеонаблюдения, механизмов для подъема и снятия автомобилей.
По способу размещения автомобилей многоуровневые парковки могут быть горизонтальными и вертикальными. Отличительных особенностей эти два вида парковок практически не имеют. Различие состоит только в позициях автомобилей при их размещении на парковках. Таким образом, автомобили могут быть поставлены на боковое место либо на вертикальное место.
Рассмотрим весь процесс размещения автомобиля на автоматизированных парковках.
Автомобиль заезжает на парковочную рампу и полностью глушит мотор. В обязательном порядке автомобиль должен оставаться на ручном тормозе. После этого водитель покидает авто и закрывает его. Далее машине присваивается идентификатор с уникальным номером и ключ-карточка со специальным паролем.
Основой работы такой парковки выступает центральный компьютер. На всей площади здания устанавливаются камеры, механические компоненты и нужные датчики. Это позволяет легко перемещать автомобили по всей парковочной площади.
На парковках устанавливается горизонтальный или вертикальный подъемник в зависимости от транспортировочных особенностей на данной конкретной парковке. Исходя из названия, различаться они будут в положении кузова в пространстве. Встроенные датчики сканирования определяют размеры и вес автомобиля. После этого механический подъемник поднимает автомобиль и размещает его на свободное подходящее место. Система самостоятельно определяет свободные места, в соответствии с этим выбирая наиболее оптимальное месторасположение.
Как правило, данный процесс транспортировки автомобилей занимает не более 3-х минут. Благодаря наличию поворотных механизмов, автомобиль будет развернут так, чтобы водителю не пришлось выезжать из парковки задним ходом.
После транспортировки автомобиля водитель получает ключ или карту, которые могут иметь секретный код. Данный код является своеобразным идентификатором автомобиля и его месторасположения на парковке.
Для того чтобы забрать автомобиль, водитель предъявляет карту или ключ, которые сканируются системой, после чего механический подъемник «передает» автомобиль его владельцу [6].
5. Метематическая постановка задачи
Парковку можно представить и математически описать в виде матрицы содержащей некоторой число строк M и некоторой число столбцов N, где каждый элемент матрицы т.е. ячейка хранит координаты физического парковочного места P1(x1;y1), P2(x2;y2),…Pn(xn;yn). Так же ячейка (парковочное место) имеет два состояния: свободная (True) и занятая (False).
На данной парковке имеется передвижной лифт у которого есть своя скорость движения как в горизонтальном Vg так и в вертикальном Vv передвижении.
Необходимо определить положение ячейки парковочного места, куда можно поместить машину. Для этого оцениваем значение фрагментации (загрузки) паркинга и определяем ячейку, время перемещения к которой будет минимальным. Таким образом, необходимо найти такую свободную ячейку которая бы удовлетворяла двум критериям поиска места:
Равномерность – это расстояние центра масс (xc, yc)системы в которой располагаются машины к физической середине центра площади (рис 6).
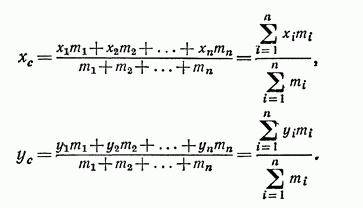
Рисунок 6 – Формула равномерности
Где xc, yc – координаты центра масс
xn, yn – координаты ячеек
mi – масса автомобля
t=V*S
V – скорость движения лифта
S – расстояние которой проделывает лифт от момента погрузки автомобиля, до парковочной ячейки.
Вычисляем для каждой ячейки значение равномерности загрузки, если значения одинаковые, то ячейка выбирается по второму критерию (времени перемещения).
V – скорость движения лифта
p – плотность наполняемости при N ярусах хранения, которая определяется как Nreal/Nmax;
Nmax – максимальное количество машин вписываемых в объем стоянки;
Nreal – действительное количество машин, которые в такой стоянке могут быть реализованы;
6. Обзор методов и алгоритмов
Дефицит парковочного пространства выдвигает задачу комплексного решения управления парковками. Это приводит к поискам новых решений, нацеленных на увеличение эффективности функционирования автомобильных парковок. В практической деятельности часто встречаются задачи, заключающиеся в поиске лучшего (оптимального) решения при наличии различных несводимых друг к другу критериев оптимальности. Для решения многокритериальных задач разработаны специальные методы, позволяющие из бесчисленного множества решений найти оптимальное [7].
6.1 Метод полного перебора
Полный перебор (или метод «грубой силы») – метод решения задачи путем перебора всех возможных вариантов. Сложность полного перебора зависит от количества всех возможных решений задачи. Если пространство решений очень велико, то полный перебор может не дать результатов в течение нескольких лет или даже столетий [8].
6.2 Метод приоритетов
Метод приоритетов решения многокритериальных задач применяется в том случае, когда критерии упорядочены по их относительной важности. На первом шаге решения задачи отбирают множество исходов, которые имеют максимальную оценку по важнейшему критерию. Если исход единственный, то он и является оптимальным. Если же исходов несколько, то среди них выбирают те, которые имеют максимальную оценку по второму по важности критерию. Если опять исходов несколько, то процесс повторяют для следующих критерий. Обоснование выбора лучшего варианта управленческого решения по методу расстановки приоритетов производится по следующему алгоритму
- определение критериев отбора предпочтительного варианта решения;
- сопоставление систем сравнения вариантов по каждому критерию;
- построение матрицы смежности по каждому критерию;
- определение абсолютного приоритета;
- определение относительного (нормированного) приоритета;
- построение системы сравнений для критериев и т. д. (как и для вариантов)[9].
6.3 Метод последовательных уступок
При поиске компромиссных решений большую результативность может дать способ последовательного выбора уступок, который позволяет оценить возможные стратегии по нескольким критериям. Этот способ предусматривает исследование ряда задач оптимизации по каждому из критериев с одновременным изменением ограничений на величины остальных.
Данный подход используется при решении многокритериальных задач, в которых все критерии можно естественно ранжировать по важности, однако не столь жестко, как в лексикографическом случае. Для решения подобных задач нередко применим метод последовательных уступок.
Процедура решения многокритериальной задачи методом последовательных уступок заключается в том, что все частные критерии располагают и нумеруют в порядке их относительной важности; максимизируют первый, наиболее важный критерий; затем назначают величину допустимого снижения значения этого критерия и максимизируют второй по важности частный критерий при условии, что значение первого критерия не должно отличаться от максимального более чем на величину установленного снижения (уступки); снова назначают величину уступки, но уже по второму критерию и находят максимум третьего по важности критерия при условии, чтобы значения первых двух критериев не отличались от ранее найденных максимальных значений больше чем на величины соответствующих уступок; далее подобным же образом поочередно используются все остальные частные критерии; оптимальной обычно считают любую стратегию, которая получена при решении задачи отыскания условного максимума последнего по важности критерия.
Таким образом, при использовании метода последовательных уступок многокритериальная задача сводится к поочередной максимизации частных критериев и выбору величин уступок. Величины уступок характеризуют отклонение приоритета од них частных критериев перед другими от лексикографического: чем уступки меньше, тем приоритет жестче[10].
Выводы
На данном этапе выполнения магистерской работы были поставлены цели и задачи разрабатываемой системы, проведен анализ существующих видов автоматизированных паркингов. Была сформулированна математическая постановка задачи.
Большинство методов решения не являются истинно субоптимальными, так как скорость работы напрямую зависит от размера задачи. Тем не менее, множественные улучшения и доработки позволяют добиться достаточного малого времени работы даже при весьма больших объемах задачи.
Список источников
- Ягузинская И. Ю., Типушова И. О. Современные автоматизированные системы парковки автомобилей // Научно-методический электронный журнал «Концепт». – 2015. – Т. 35. – С. 156–160. Режим доступа: https://e-koncept.ru...
- Дуванова И.А. Автомобильные стоянки и парковки в мегаполисах // Строительство уникальных зданий и сооружений. – 2015, №12 (39) Санкт-Петербургский политехнический университет Петра Великого. Режим доступа: https://docviewer.yandex.ua...
- Июльский Д.В., Кожевников С.О. Технические решения автоматизированных стоянок для легковых автомобилей//Вестник Ивановского государственного политехнического университета. 2015. – №1(2). C.103–107. Режим доступа: https://elibrary.ru...
- Парковки и паркинги. Часть 1 [Электронный ресурс] /. Электрон. текстовые дан. – Режим доступа: https://www.proektant.ru...
- Типы парковок. Преимущества многоуровневых паркингов [Электронный ресурс] /. – Электрон. текстовые дан. – Режим доступа: https://pravosude.ru...
- Как работают системы многоуровневых парковок [Электронный ресурс] /. Электрон. текстовые дан. – Режим доступа: https://www.znaikak.ru...
- Кириллова, Н.М. Классификация подземных гаражей -автостоянока /Н.М. Кириллова. – Международный научный журнал «Символ Ураины». — 2017.
- Методы решения задачи о Коммивояжере [Электронный ресурс] /. Электрон. текстовые дан. – Режим доступа: https://poisk-ru.ru...
- Методы оптимальных решений [Электронный ресурс] /. Электрон. текстовые дан. – Режим доступа: https://studfiles.net...
- Разработка и исследование адаптивного поискового алгоритма для решения многокритериальных задач условной оптимизации [Электронный ресурс] /. Электрон. текстовые дан. — Режим доступа: https://vuzlit.ru...