
Реферат за темою випускної роботи
Змiст
- Вступ
- 1. Актуальність теми
- 2. Параметри і режими роботи елементів комплексу упорскування води
- 3. Аналіз існуючих рішень
- 4. Розробка концепції побудови САУ
- 4.1 Обгрунтування вибору способу управління насосною установкою
- 4.2 Обгрунтування вибору та очікувані результати обраного варіанту концепції САУ
- Высновки
- Список джерел
Вступ
В силу існуючих технологічних і технічних особливостей цементні заводи - це енергоємні підприємства. Від 60 до 70 відсотків собівартості тонни цементу становлять енергоносії, ціни на які зростають з року в рік. У потужних обертових печах випалення клінкеру виробляється шляхом спалювання сотень тисяч кубів імпортного природного газу. Таким чином, проблема енергоефективності сьогодні набуває особливої важливості, як для цементної галузі, так і для економіки Донбасу в цілому. Основним напрямком економічної стратегії є переклад цементної промисловості на вугільне паливо, що дозволить знизити енерговитрати на виробництво цементу, скоротити до мінімуму використання імпортних вуглеводнів. Застосування сучасних вугільних млинів вирішує поставлені завдання, але дане обладнання має ряд недоліків, які ведуть до необгрунтованих витрат електроенергії, збільшення зносу обладнання і собівартості виробленої продукції. В даний час, частина існуючих підприємств, що використовують вугільне паливо, вже обладнані сучасними вугільними млинами, які обладнані необхідними засобами і системами автоматизації. Перш за все, необхідно відзначити, що при автоматизації основних і допоміжних технологічних процесів при виробництві цементу застосовуються індивідуальні розробки та проекти систем і засобів автоматизації для конкретного технологічного процесу в умовах певного підприємства. В існуючих АСУТП підприємств з виробництва цементу відсутні типові, стандартні, уніфіковані рішення по автоматизації, в тому числі і для комплексу упорскування води.
Як правило, функції контролю і управління комплексом упорскування води в роликову млин реалізуються в рамках загальної АСУТП вертикальної роликового млином (або АСУТП углепомольним відділенням), а не окремої САУ. Це призводить до того, що виконуються функції контролю і управління основними параметрами, часто за спрощеними схемами і принципам управління, що призводить до незадовільної якості управління з позицій сучасних вимог. Крім того, частина функцій управління реалізується оператором в ручному режимі дистанційно, в тому числі і функції управління уприскуванням води. Існуючі системи автоматичного управління комплексом упорскування води в роликові млини цементних заводів не виконують всіх необхідних функцій з управління та контролю параметрами даного об’єкту управління. Тому розробка системи автоматичного комплексом упорскування води в вертикальну роликовую млин є актуальною. Метою даної роботи є підвищення ефективності функціонування комплексу упорскування води в вертикальну роликовую млин за рахунок розробки системи автоматичного управління, що дозволить підвищити надійність і безпеку даного об’єкта, а також знизити експлуатаційні витрати на процес його функціонірованія.Достіженіе поставленої мети можливо за рахунок глибокого аналізу особливостей даного об’єкта управління, розробки і реалізації необхідних алгоритмів управління з використанням сучасної елементної бази — прoграмміруемих логічних контролерів, датчиків і виконавчих механізмів.
1. Актуальність теми
Як правило, функції контролю і управління комплексом упорскування води в роликову млин реалізуються в рамках загальної АСУТП вертикальної роликового млином (або АСУТП углепомольним відділенням), а не окремої САУ. Це призводить до того, що виконуються функції контролю і управління основними параметрами, часто за спрощеними схемами і принципам управління, що призводить до незадовільної якості управління з позицій сучасних вимог. Крім того, частина функцій управління реалізується оператором в ручному режимі дистанційно, в тому числі і функції управління уприскуванням води.
Розглянуті системи автоматичного управління комплексом упорскування води в вертикальну роликовую млин (діюча на Амвросіївському цементному заводі Донцемент
і застосовуються на інших млинах) не виконують всіх необхідних функцій з управління та контролю параметрами даного об’єкту управління. Тому розробка системи автоматичного управління комплексом упорскування води в вертикальну роликовую млин в умовах Амвросіївського цементного заводу «Донцемент» є актуальною.
2. Параметри і режими роботи елементів комплексу упорскування води
Резервуар з відповідною арматурою призначений для безперебійного постачання водою і згладжування коливань її витрати, що виникають при зміні навантаження на роликову млин, і відповідно, на комплекс упорскування води.
Об’єктом регулювання є резервуар, вихідний керованої величиною якого є рівень води НР (t) , що залежить від витрати води, що подається QBX (t) і поточної подачі насосної установки QH (t) . Математичний опис резервуара має вигляд [ 1 ]:
де dНр (t) / dt - швидкість зміни рівня в водозбірнику, м / с;
QBX (t) - витрата подається в резервуар води, м3 / год;
QH (t) - подача насоса, м3 / год;
kВ - конструктивний коефіцієнт резервуара:

де F - площа резервуара, м2.
На ефективність функціонування комплексу упорскування води впливають ряд параметрів насосної установки, що визначають її поточний стан: [4]
- QH (t) - подача насосної установки;
- H (t) - напір (тиск) насосної установки;
- HВ (t) - вакуумметричний висота всмоктування;
- η - коефіцієнт корисної дії насосної установки;
- ω - частота обертання валу насоса;
- геометричні параметри трубопроводів: dВ – діаметр всмоктуючого трубопроводу; dН – діаметр нагнітального трубопроводу; LВ – довжина всмоктувальної трубопроводу; LН – довжина нагнітального трубопроводу; - αВ – гідравлічний опір всмоктуючого трубопроводу;
- αH – гідравлічний опір нагнітального трубопроводу.
Для даного об’єкту управління основною вихідний керованої змінної є подача насосної установки QH, яка визначає продуктивність всього комплексу упорскування води. Існують різні способи управління подачею відцентрового насоса, аналіз яких буде виконано нижче. Вишерассмотренние змінні і параметри відцентрової насосної установки взаємопов’язані через рівняння напірних характеристик насоса і трубопроводу. Рівняння напірної характеристики відцентрової насосної установки записується в наступному вигляді [6]:
де НO - напір насоса, який створюється при закритій засувці;
Q - продуктивність (подача) насоса;
А, В - постійні коефіцієнти для обраного типу насоса (визначаються за довідником).
Рівняння напірної характеристики трубопроводу, як правило, представляється у вигляді:

де НΓ - геометрична висота підйому води (для даного об’єкту – насосної установки комплексу вприскування можна прийняти рівною нулю);
Δ Нφ - фактична втрата напору в трубопроводі;
αT - опір напірного трубопроводу.
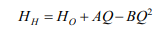
Робочий режим насосної установки визначається спільною роботою насоса і трубопроводу і його можна визначити аналітичним або графічним рішенням системи рівнянь напірної характеристики насоса і напірної характеристики трубопроводу. Точка перетину характеристик (точка А) (рис. 2.1) визначає робочий режим насосної 17 установки. Тут же наводиться крива ККД насоса і допустимої вакуумметричного висоти всмоктування НB.
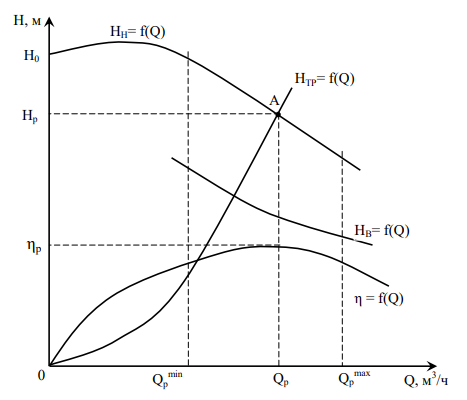
Рисунок 2.1 – Характеристики відцентрової насосної установки
Робочий режим відцентрового насоса повинен задовольняти за умовою бескавитационной роботи HВС ≤ HВр. В даному комплексі упорскування води для забезпечення стійкої бескавитационной роботи насосної установки необхідно підтримувати необхідний рівень води в резервуарі ηР.
Управління насосною установкою повинно здійснюватися в межах зони її промислового використання - QPmin < QP < QPmax.
З урахуванням проведеного вище аналізу особливостей комплексу упорскування води в роликову млин, отримана схема (рисунок 2.2) основних каналів управління, обурення і взаємозв’язку параметрів в об’єкті, що представляє собою з’єднання основних технологічних елементів – резервуара з водою, насосної установки і вертикальної роликового млина.
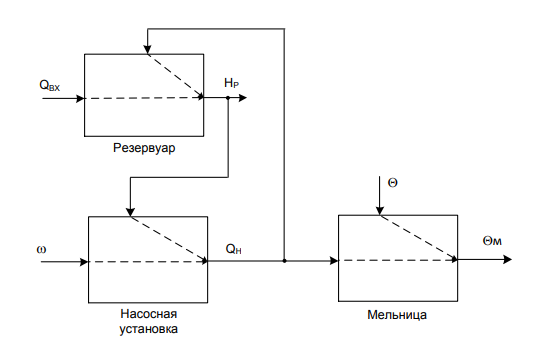
Рисунок 2.2 - Узагальнена схема комплексу упорскування води як об’єкта управління
Керованими змінними, що характеризують процес упорскування води в млин, є (рис.2.2):
- для резервуара – рівень води в резервуарі НP;
- для насосної установки – подача на виході насоса QH;
- для вертикальної роликового млина – температура на виході QM.
Керуючими впливами, що дозволяють необхідним чином змінювати режим роботи комплексу упорскування води, є (рис.2.2):
- для резервуара - витрата води на вході в резервуар QBX, який визначається положенням (кутом повороту) засувки на трубопроводі, що подає;
- для насосної установки – частота обертання валу насоса ω;
- для вертикальної роликового млина – витрата води на уприскування QH.
Возмущающими впливами для елементів комплексу упорскування води виступають (рис.2.1):
- необхідну витрату води на уприскування QH (для резервуара);
- підпір на вході в насос, що залежить від рівня води в резервуарі ηP (для насосної установки);
- фактори, що викликають зміну температури на виході млина Q (для роликового млина).
Таким чином, виконаний вище аналіз особливостей функціонування комплексу упорскування води в вертикальну роликовую млин дозволив сформулювати необхідні функції контролю і управління розробляється САУ:
- контроль рівня води в резервуарі;
- контроль подачі на виході насосної установки;
- контроль температури на виході роликового млина;
- автоматичне керування рівнем води в резервуарі;
- автоматичне керування подачею насоса;
- автоматичне керування температурою на виході роликового млина.
3. Аналіз існуючих рішень
На даний момент не існує уніфікованої, стандартної, серійно випускається системи автоматичного управління, для даного об’єкту – комплексу упорскування води в вертикальну роликовую млин підприємства з виробництва цементу.
В даний час на Амвросіївському цементному заводі Донцемент
функції контролю і управління технологічними параметрами комплексу упорскування води в роликову млин реалізовані 20 частково. Ці функції є частиною функцій загальної АСУТП углепомольного відділення, яка була впроваджена на підприємстві в 2010 році [2]. Таким чином, існуюча САУ не виконує всіх необхідних функцій контролю і управління і не забезпечує необхідної якості управління комплексом упорскування води в вертикальну роликовую млин, що знижує ефективність функціонування даного процесу.
Для автоматизації процесу мокрого помелу сировини розроблені комплектні установки КРС-63К або КРС-63Б, які дозволяють автоматично регулювати харчування млини твердими компонентами і шламом, а також контролювати основні технологічні параметри – витрата вапняку, частоту шуму на початку першої камери млина і в зоні шламообразованія ( друга камера); в’язкість шламу; витрати води; швидкість обертання ковшових живильників глиняного шламу.
Система ВРХ забезпечує можливість ручного дистанційного керування всіма регулюючими механізмами.
У відділенні мокрого помелу сировини, крім того, передбачені дистанційне з блокуванням управління всіма механізмами приводу млинів (включаючи системи змащення), механізмами завантаження млинів, механізмами транспортування готового шламу і роботою насосів, що відкачують шлам, а також повертають в басейн надлишок глиняного шламу, зливається з живильників.
Система автоматичного управління кульової барабанної млином САУ ШМБ призначена для забезпечення централізованого контролю та автоматичного управління технологічним процесом помелу вугілля в кульових барабанних.
САУ ШМБ забезпечує виконання таких функцій:
- дистанційний автоматичний контроль об’єму завантаження вугілля у барабані, що обертається млини, температури гарячого повітря на вході млина, температури пилоповітряної суміші (ПВС) після млина, перепад тиску на млині, розрідження перед млином;
- дистанційне керування виконавчими механізмами;
- автоматичне регулювання продуктивності живильника сирого вугілля;
- автоматична стабілізація температури ППС на виході з млина;
- стабілізація розрідження гарячого повітря на вході в млин;
- захист технологічного обладнання помелу сирого вугілля;
- зупинка живильника сирого вугілля по уставками технологічних параметрів;
- зупинка живильника сирого вугілля за сигналами захистів.
Узагальнена структурна схема САУ ШМБ зображена на рисунок 3.1.
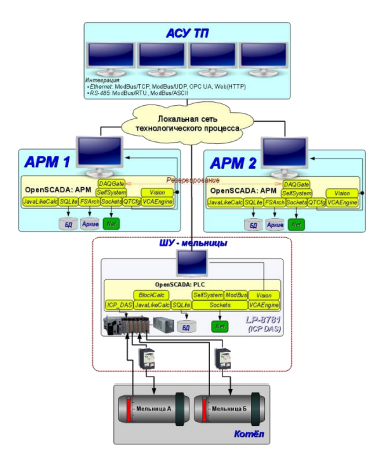
Рисунок 3.1 - Структурна схема САУ ШМБ
До складу САУ ШМБ, представленої на рис. 3.1, входять: шафа управління PLC із сенсорною панеллю локального управління, дві станції автоматизованих робочих місць оператора АРМ 1 та АРМ 2, і ПО 22 інтеграції в систему автоматизації цеху (відділення).
Аналіз розглянутих вище існуючих рішень з автоматизації комплексу упорскування води в вертикальну роликовую млин підприємства з виробництва дозволив виділити наступні особливості, проблеми та недоліки.
Перш за все, необхідно відзначити, що при автоматизації основних і допоміжних технологічних процесів при виробництві цементу застосовуються індивідуальні розробки та проекти САУ, АСУТП для конкретного процесу в умовах певного підприємства. Як показує вище проведений аналіз, в діючих АСУТП підприємств з виробництва цементу відсутні типові, стандартні, уніфіковані рішення по автоматизації, в тому числі і для комплексу упорскування води. Ця особливість пов’язана з індивідуальністю технологічного обладнання та технологічних схем розглянутих підприємств [5].
Технічна реалізація САУ комплексом упорскування води в вертикальну роликовую млин, як видно з аналізу, виконана на елементній базі різних виробників.
Як правило, функції контролю і управління комплексом упорскування води в роликову млин реалізуються в рамках загальної АСУТП вертикальної роликового млином (або АСУТП углепомольним відділенням), а не окремої САУ. Це призводить до того, що виконуються функції контролю і управління основними параметрами, часто за спрощеними схемами і принципам управління, що призводить до незадовільної якості управління з позицій сучасних вимог. Крім того, частина функцій управління реалізується оператором в ручному режимі дистанційно, в тому числі і функції управління уприскуванням води.
Оскільки автомати Мура є важливою частиною цифрових систем, то проблеми їх синтезу, аналізу, мінімізації та реалізації були широко досліджені як американськими, європейськими, японськими вченими, так і вітчизняними фахівцями. Питанням реалізації цифрових пристроїв за допомогою FPGA і Verilog HDL також присвячений ряд робіт, в основному, дослідників західної школи.
4. Розробка концепції побудови САУ
4.1 Обгрунтування вибору способу управління насосною установкою
Управління параметрами робочого режиму насосної установки може здійснюватися наступними способами:
- зміною частоти обертання приводного електродвигуна за допомогою перетворювачів частоти;
- зміною характеристики мережі (напірного трубопроводу) за допомогою керованої засувки;
- підведенням повітря у всмоктувальну систему насоса.
Кожен спосіб регулювання має як свої переваги, так і недоліки.
Напорная характеристика насоса НH (Q) при номінальній частоті обертання n і характеристика трубопроводу HTP (Q) визначають робочу точку системи "насос - трубопровід" (точка 2) в номінальному режимі роботи (рис.4.1).
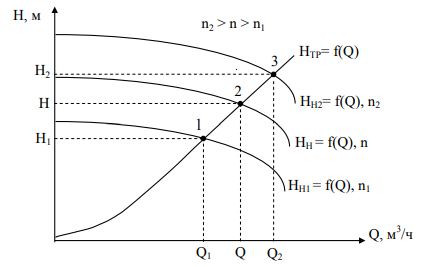
Рисунок 4.1 - Управління параметрами насосної установки зміною частоти обертання приводного електродвигуна
Режим роботи водовідливної установки визначається двома основними параметрами - натиск Н і подача Q. При зміні частоти обертання відповідним чином буде змінюватися напірна характеристика насоса, робоча точка водовідливної установки, а значить і параметри H і Q (рис. 4.1). Напірні характеристики насоса при зміні частоти від n1 до n2 забезпечують зміна параметрів робочого режиму від (Q1, H1 ) до (Q2, H2 ). Точки 1, 2, 3 лежать на напірної характеристиці зовнішньої мережі (трубопроводу) НTP (Q) і визначають робочі режими насосної установки при зміні частоти обертання n2 > n> n1.
Управління параметрами насосної установки зміною частоти обертання приводного електродвигуна має такі переваги: універсальність, можливість досягнення подач насосів як менших, так і великих номінальної; економічність - витрата енергії на управління визначається к.к.д. пристроїв, застосовуваних для зміни частоти обертання. К.к.д. при правильному підборі може бути досить високим [4]. До недоліків слід віднести відносно високу вартість керованого електроприводу.
Багато досліджень присвячено управлінню робочими параметрами насоса підведенням повітря в його всмоктувальну систему. Ставлення дослідників до даного способу управління неоднозначно. На початкових стадіях досліджень цей спосіб вважався перспективним і економічним: низький витрата енергії на управління, відносно велика глибина зміни подачі. Однак подальші дослідження показали, що підсосі і потрапляння повітря у всмоктувальну систему насоса негативно позначається на його роботі. Недоліки цього способу управління: можливість управління тільки на зниження подачі, можливість зриву роботи насоса при великій витраті повітря, складна система управління. Підсосі повітря викликають різке погіршення акустичних і вібраційних характеристик, пульсації напору, подачі, потужності, тиску на вході [6]. Особливо негативно потрапляння повітря впливає на довговічність і надійність гідравлічного 26 розвантажувального пристрою відцентрової насосної установки. З огляду на всі ці фактори, слід визнати спосіб управління параметрами насосної установки впусканням повітря неприпустимим.
Управління робочим режимом насосної установки може здійснюватися зміною напірної характеристики мережі при незмінній характеристиці насоса. Найбільш вживана практична реалізація даного способу управління – дросселирование нагнітального трубопроводу керованої засувкою (рис.4.2).
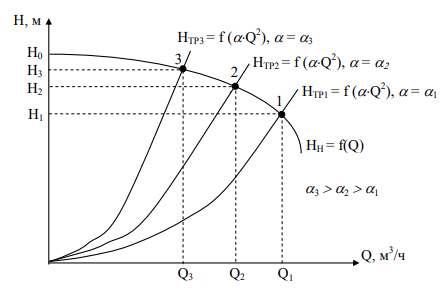
Рисунок 4.2 - Управління параметрами насосної установки зміною напірної характеристики трубопроводу
Закриваючи або відкриваючи керовану засувку, ми змінюємо опір мережі α × Q2 (рис.4.2), внаслідок чого змінюється напірна характеристика трубопроводу [1]. Нахил напірної характеристики трубопроводу НТР визначається опором трубопроводу α. Чим більше прикрита керована засувка, тим більше опір трубопроводу (α3 > α2 > α1 ), і тим крутіше пройде характеристика мережі (рис.4.2). Зміна характеристики трубопроводу (НTP1 → НTP2 → НTP3 ) призводить до зміни робочого режиму відцентрової насосної установки (рис.4.2).
Переваги цього способу управління, такі: простота, надійність, відсутність необхідності в дорогому обладнанні. Недоліком цього способу є збільшення питомих енерговитрат на процес впорскування води.
Таким чином, при розробці моделі об’єкта управління і побудові системи автоматичного управління комплексом упорскування води в вертикальну роликовую млин необхідно врахувати можливість застосування двох способів управління - зміна частоти обертання приводного електродвигуна (при плавному пуску і зупинці насоса на закриту засувку, а також управлінні подачею насоса при для стабілізації заданої температури на виході млина) і дросселирование нагнітального трубопроводу керованої засувкою - при плавному відкритті / з акритіі засувки після запуску насоса на закриту засувку [7].
4.2 Обгрунтування вибору та очікувані результати обраного варіанту концепції САУ
Реалізація розробляється САУ комплексом упорскування води в вертикальну роликовую млин (рис.4.3) пропонується за принципом зворотного зв’язку по основним керованим змінним для кожного технологічного модуля:
- рівню води в резервуарі НP;
- подачі на виході насоса QH
- температурі на виході вертикальної роликового млина θM.
САУ резервуаром (рис.4.3) реалізується за принципом зворотного зв’язку - підтримання необхідного рівня води в резервуарі НP здійснюється за рахунок зміни витрати води QBX, яка подається в резервуар. Обурюють впливом в САУ резервуаром є витрата води, що споживається з резервуара, який в даному комплексі упорскування води дорівнює подачі на виході насосної установки QH.
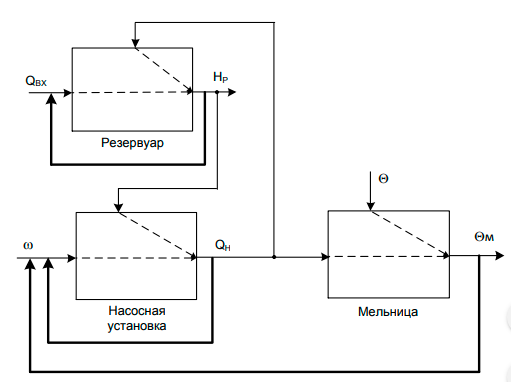
Рисунок 4.3 - Структурна схема концепції побудови САУ
САУ температурою на виході роликового млина реалізується за двоконтурною схемою підлеглого регулювання з включенням до свого складу елементів двох технологічних модулів – насосної установки та млини (рис.4.3). Внутрішній контур управління здійснює стабілізацію необхідної витрати на виході насосної установки QH за рахунок зміни частоти обертання валу насоса ω [3]. Зовнішній контур управління задає необхідну витрату води в млин (рівний подачі на виході насосної установки QH ) для підтримки заданої температури θM на виході млина при дії температурних збурень θ (рис.4.3).
Використання запропонованої концепції розробки САУ комплексом упорскування води дозволяє підвищити якісні показники підтримки розглянутих технологічних параметрів – рівня води в резервуарі, подачі на виході насосної установки, температури на виході роликового млина; виключити виникнення коливань перерахованих параметрів; підвищити надійність і знизити експлуатаційні витрати на даний об’єкт управління – комплекс упорскування води в вертикальну роликовую млин.
Рисунок 4.4 - Схема роботи вертикальної роликового млина
(анімація: 8 кадрів, 5 циклів, 21 кілобайт)
Висновки
Виконаний аналіз існуючих рішень в області автоматизації комплексу упорскування води в роликову млин підтвердив актуальність даної теми та необхідність в розробці сучасної системи автоматичного керування даним об’єктом.
Запропоновано концепцію розробки системи автоматичного управління комплексом упорскування води в вертикальну роликовую млин. На підставі аналізу існуючих принципів побудови систем автоматичного управління було вирішено використовувати принцип зворотного зв’язку, як найбільш підходящий для вирішення поставленого завдання автоматизації даного об’єкту. Впровадження запропонованої концепції дозволить підвищити надійність і знизити експлуатаційні витрати на функціонування комплексу упорскування води в вертикальну роликовую млин
Список источников
- Гаврилов, П. Д. Автоматизация производственных процессов. Учебник для вузов. / Гаврилов П. Д., Гимельштейн Л. Я., Медведев А. Е. – М.: Недра, 1985. - 215 с.
- Черкасский, В. М. Насосы, вентиляторы, компрессоры. / В. М. Черкасский – М.: Энергоатомиздат, 1984 - 416 с.
- Локалов, Г. А. Осевые и центробежные насосы тепловых электрических станций. / Г. А. Локалов, В. М. Марковский – Екатеринбург: Изд-во Урал. ун-та, 2016 - 140 с.
- Карелин, В. Я. Насосы и насосные станции: Учеб. для вузов / В. Я. Карелин, А. В. Минаев - 2-е изд., перераб и доп. - М.: Стройиздат, 1986. - 320 с.
- Гейер, В. Г. Шахтные вентиляторные и водоотливные установки. / В. Гейер, Г. Тимошенко. – М.: Недра, 1987.- 270 с.
- Строй-Техника.ру. Строительные машины и оборудование, справочник. Автоматизация процессов помола. [Электронный ресурс]. – Режим доступа: http://stroy-technics.ru/article/avtomatizatsiya-protsessov-pomola.
- OpenSCADA. Система автоматического управления загрузкой шаровых барабанных мельниц. [Электронный ресурс]. – Режим доступа: http://oscada.org/ru/glavnaja/produkty/odinochnaja-stranica/article/the-automaticcontrol-system-acs-of-the-ball-mills-load/ .