Реферат по темі випускної роботи
Зміст
- Введення
- 1. Дослідне визначення параметрів і Розрахунок робочих характеристик асинхронних двигунів
- 1.1. Основне поняття
- 1.2. Досвід холостого ходу
- 1.3. Досвід короткого замикання
- 2.Визначення параметрів схеми заміщення асинхронного двигуна за довідковими даними
- 3. Розрахунок параметрів схеми заміщення за відомими методиками
- Висновок
- Список джерел
Введення
У сучасних системах управління двигунами як постійного так і змінного струму є максимально точне визначення їх енергетичних і механічних параметрів, для реалізації найбільш якісного та економічного управління і регулювання. Не завжди є можливість визначити параметри двигуна за паспортними даними, а якщо вони і є то лише основна інформація , така як: номінальна потужність , Номінальна напруга , Номінальний струм, номінальна частота і номінальна швидкість . Для коректного регулювання електроприводу приводчикам необхідно мати більш великі знання про машину, такі як: активний опір статора і ротора, індуктивний опір статора і ротора, потокосцепления статора, ротора, які неможливо знайти в довідкових матеріалах. Дані знання відіграють значну роль в сучасних системах регулювання електроприводів, тому існує необхідність точного визначення даних параметрів розрахунковим або будь-яким іншим способом. В даний час величезну популярність, серед пристроїв управління електроприводами, мають (ПЧ), що розраховують потрібні параметри схеми заміщення автоматично по заздалегідь закладеним формулами і командам, завдяки яким дані пристрої є кращим варіантом в світі на даний момент в плані управління і регулювання двигунами змінного струму.
Залежно від різних методик розрахунку параметрів схеми заміщення можна отримати абсолютно відмінні значення, тому дуже важливо підібрати відповідний спосіб для кожного двигуна індивідуально.
1. Дослідне визначення параметрів і Розрахунок робочих характеристик асинхронних двигунів
1.1. Основне поняття
Існує два методи отримання даних для побудови робочих характеристик асинхронних двигунів: метод безпосереднього навантаження і непрямий метод[1]. Метод безпосереднього навантаження полягає в дослідному дослідженні двигуна в діапазоні навантажень від холостого ходу до режиму номінального навантаження з вимірюванням необхідних параметрів. Цей метод зазвичай застосовується для двигунів потужністю не більше 10–15 кВт. З ростом потужності двигуна ускладнюється завдання його навантаження, ростуть непродуктивний витрата електроенергії і завантаження електромережі. Застосування цього методу обмежується ще й тим, що не завжди представляється можливим створити випробувальну установку через відсутність необхідного обладнання і неприпустимості перевантаження електромережі. Широке застосування отримав більш універсальний непрямий метод, застосування якого не обмежується потужністю двигуна. Цей метод полягає у виконанні двох експериментів: досвіду холостого ходу і досвіду короткого замикання.
Ці досліди легко реалізуються, для їх проведення потрібна мінімальна потужність встановленого обладнання. Експериментальні дослідження асинхронних двигунів в робочих режимах, як правило, не проводяться з причини їх великої трудомісткості і вартості. Характеристики асинхронних двигунів в робочих режимах отримують розрахунковим шляхом за схемою заміщення.
1.2. Досвід холостого ходу
Харчування асинхронного двигуна при досвіді х. х. здійснюється через (ИР) напруга(рис. 1.1) або (АТ), дозволяють змінювати напругу в широких межах, також можна використовувати (ТРН) або (НВЧ). При цьому вал двигуна повинен бути вільним від механічного навантаження[2]. У схемі присутні також вимірювальні прилади: амперметр, вольтметр і ватметр, для зняття потрібних фізичних величин.
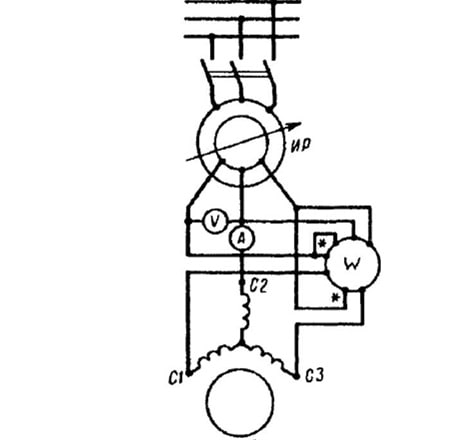
Малюнок 1.1 – Схема включення трифазного асинхронного двигуна при дослідах х. х. і К. з.
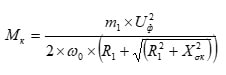
Досвід починають з підвищеної напруги живлення[3]
потім поступово знижують напругу до 0,4 U1ном так, щоб зняти показання приладів в 5–7 точках. При цьому один із вимірів повинен відповідати номінальній напрузі U1ном. вимірюють лінійні значення напруг і струмів і обчислюють їх середні значення:
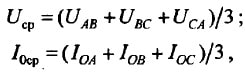
А потім в залежності від схеми з'єднання обмотки статора визначають фазні значення напруги і струму х. х.:
При з'єднанні в зірку
Ппри з'єднанні в трикутник
Ватметр W вимірює активну потужність Ро, споживану двигуном в режимі Х. Х., яка включає в себе електричні втрати в обмотці статора, магнітні втрати в сердечнику статора Рм і механічні втрати Рмех (Вт):
Тут R1 & ndash; активний опір фази обмотки статора( Ом), виміряний безпосередньо після відключення двигуна від мережі, щоб обмотка не встигла охолодитися[4].
Сума магнітних і механічних втрат двигуна (Вт)
Коефіцієнт потужності для режиму х. х.
За результатами вимірювань і обчислень будують характеристики х. х.
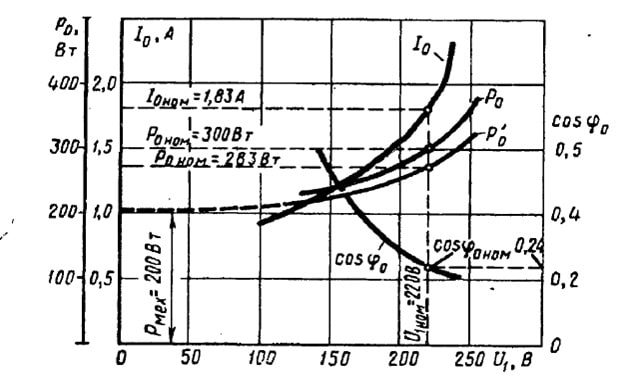
Малюнок 1.2 & ndash; Характеристики х. х. на прикладі асинхронного двигуна (3.0 кВт, 220/380 в, 1430 об / хв)
Для асинхронних двигунів з фазним ротором в досвіді х. х. визначають коефіцієнт трансформації напруг між обмотками статора і ротора. Цей коефіцієнт з достатньою точністю може бути визначений по відношенню середніх арифметичних лінійних (міжфазних) напруг статора до аналогічних напруг ротора.
1.3. Досвід короткого замикання
Схема з'єднань асинхронного двигуна при досвіді к. з. залишається, як і в досвіді х. х. (див.рис. 1.1)[5]. Але при цьому вимірювальні прилади повинні бути обрані відповідно до меж вимірювання струму, напруги і потужності. Ротор двигуна слід жорстко закріпити, попередньо встановивши його в положення, відповідне середньому струму к. з.з цією метою до двигуна підводять невелику напругу (Uk=0.1u1ном) і повільно повертаючи ротор, стежать за показанням амперметра, стрілка якого буде коливатися в залежності від положення ротора двигуна. Пояснюється це взаємним зміщенням зубцевих зон ротора і статора, що викликає коливання індуктивних опорів обмоток двигуна.
Граничне значення струму статора при досвіді к. з.встановлюють виходячи з допустимої струмового навантаження мережі живлення і можливості провести досвід в мінімальний термін, щоб не викликати небезпечного перегріву двигуна. Для двигунів потужністю до 1 кВт можливе проведення досвіду починаючи з номінальної напруги Uк=U1ном.в цьому випадку граничний струм Ik=(5–7)Іном. Для двигунів більшої потужності сила граничного струму Ік=(2,5–5)І1ном. При виконанні досвіду к. з. в навчальних цілях можна обмежитися граничним струмом Ік=(1,5–2,5)І1ном.При виконанні досвіду к. з. бажано з'єднання обмотки статора зіркою.
Визначивши діапазон зміни струму статора при досвіді К. З., досвід починають з граничного значення цього струму, встановивши на індукційному регуляторі відповідне напруга К.З. Uк. Потім поступово знижують цю напругу до значення, при якому струм Ік досягне нижньої межі встановленого діапазону його значень. При цьому знімають показання приладів для 5 & ndash;7 точок, одна з яких повинна відповідати номінальному струму статора (Ik=І1ном). Тривалість досвіду повинна бути мінімально можливою. З цією метою вимірюють лише одне лінійне напруга (наприклад, UКАВ), так як деяка несиметрія лінійних напруг при досвіді к. з.не має значення. Лінійні струми вимірюють хоча б у двох лінійних проводах (наприклад, ІКА та ІКВ). За розрахункове значення струму к. з.приймають середнє арифметичне цих двох значень. Після зняття останніх показань приладів двигун слід відключити і відразу ж зробити завмер активного опору фази обмотки статора, щоб визначити температуру обмотки. Лінійні напруги і струми перераховують на фазні і Ік за формулами, аналогічним досвіду х. х.
Ватметр W вимірює активну потужність к. з.Рк. За отриманими значеннями напруг Uk, струмів Ik і потужностей Pk обчислюють наступні параметри:
коефіцієнт потужності при К. з.
Повний опір к. з.
активні та індуктивні складові цього опору (Ом)
Виміряні і обчислені величини заносять в таблицю, а потім будують характеристики к. з. (рис. 1.3).
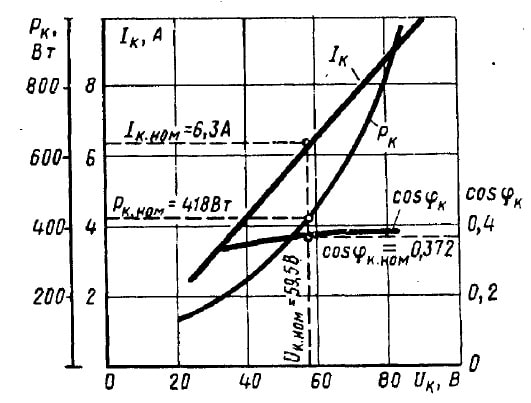
Малюнок 1.3 – Характеристики К. з. на прикладі асинхронного двигуна (3.0 кВт, 220/380 в, 1430 об / хв)
При досвіді к. з. обмотки двигуна швидко нагріваються до робочої температури, так як при нерухомому роторі двигун не вентилюється.
Температуру обмотки зазвичай визначають по опору бази, виміряному безпосередньо після проведення досвіду, за формулою:
Якщо ж температура обмотки виявилася менше розрахункової робочої температури для відповідного класу нагрівостійкості ізоляції двигуна, то активний опір к. з. rk перераховують на робочу температуру:
Потім перераховують на робочу температуру Повний опір к. з.
напруга к.з.