


Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Функциональная схема системы управления
- 4. Анализ состава оборудования
- 5. Выбор программируемого контроллера
- 6. Описание двигателей
- 7. Описание драйвера
- 8. Описание модуля Bluetooth
- 9. Принцип работы
- Заключение
- Список источников
Введение
С развитием электроники стала бурно развиваться промышленность микроконтроллеров, это в свою очередь предоставляет возможность создавать роботов, которые способны решать любые задачи как в быту, так и на производстве.
Для робототехнической системы одной из важнейших задач, является идентификация ситуации (местоположения) в текущий момент времени. Решение этой задачи реализуется разработкой определенных алгоритмов управления. Управление объектами осуществляется с помощью методов искусственного интеллекта, которые получают информацию по средствам компьютерного зрения [1].
1. Актуальность темы
В данной работе был создан робот манипулятор на гусеничном ходу, который является прототипом механизма, предназначенного для работы в труднодоступных или опасных для человека местах (например, проверка трубопроводов, туннелей, осмотр пространства под неподвижными транспортными средствами). Глазами робота выступает веб-камера ПК, управление роботом происходит по беспроводному соединению Bluetooth.
Одним из важных аспектов в этой работе является использование компьютерного зрения основой которого является предварительно обученная на обнаружение двух объектов нейронная сеть.
2. Цель и задачи исследования
Цель работы – разработка автоматической системы смысл которой заключается в том что, в зону видимости камеры помещается два объекта. Первым объектом выступает схват робота манипулятора на гусеничной тяге, вторым объектом объект, к которому необходимо подъехать тележке. Система управления должна обнаружить на изображении два этих объекта, вычислить реальное расстояние между ними, сформировать задание на перемещение, отработать это задание с минимальной ошибкой.
Разрабатываемая система должна выполнять ряд функций и иметь ряд особенностей, а именно:
- Система управления должна быть полностью автоматической;
- Связь между роботом и ПК должна устанавливаться автоматически, в случае неудачи, попытка соединения должна быть возобновлена;
- Создание нового кадра, а также запуск алгоритма обработки кадра запускается только по сигналу с платы контроллера;
- Система положения должна обладать задатчиком положения, задание должно приходить в миллиметрах.
3. Функциональная схема системы управления
Функциональная схема системы состоит из веб камеры, которая передает изображение в среду python (ПК), ПК в свою очередь при возникновении ошибок выводит информацию в терминал, а также обменивается данными с контроллером по Bluetooth.
На рисунке 1 представлена функциональная схема системы.
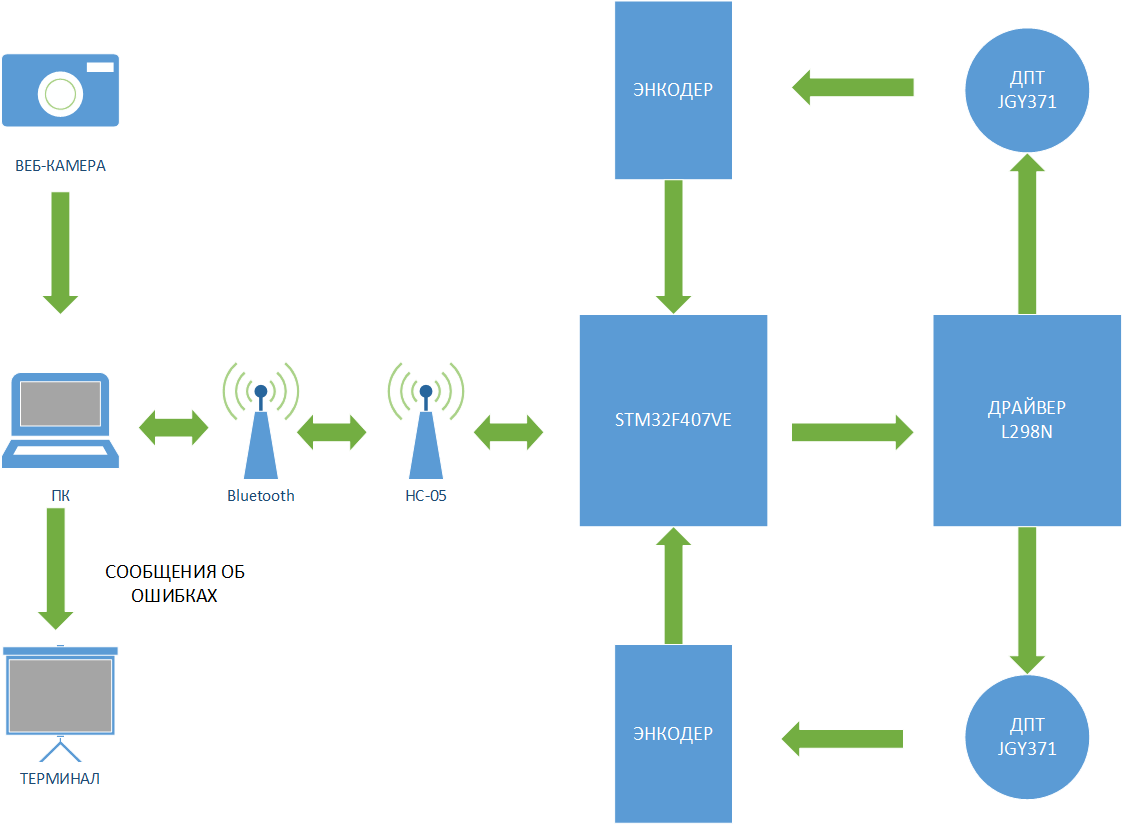
Рисунок 1 – Функциональная схема системы
Контроллер, получив данные о местоположении искомых объектов вычисляет расстояние между ними. На основании полученной информации формирует задание для системы управления. После этого формируются соответствующие сигналы управления для драйвера, который в свою очередь управляет двигателями платформы.
Информация о пройденном расстоянии робота снимается с энкодеров и передается по проводам снова в контроллер.
4. Анализ состава оборудования
Так как платформа является передвижным основанием на котором в последующем будет монтироваться манипулятор, то на стадии проектирования необходимо было учитывать приблизительные значения массогабаритных показателей манипулятора, материал из которого он будет изготовлен, а также учитывать максимальное расстояния перемещения схвата, на основании вышеперечисленных показателей было принято решение максимально занизить платформу для смещения центра тяжести, увеличить массу платформы за счет металлических конструкций, которые послужили основанием каркаса. Таким образом было минимизировано опрокидывания платформы, но этого было недостаточно, поэтому уже на стадии сборки было принято решение увеличить ширину и длину как гусениц, так и основания для их крепления.
В качестве основания для гусениц был выбран металлический уголок размером 20х30мм, благодаря свойствам конструкции ребра уголка обеспечивается жесткость гусеницы.
Рисунок 2 – Металлический уголок 20х30мм
Конструкция платформы представляет собой два металлических уголка, скрепленных между собой, к которым прикреплены системы шестерен и роликов.
Нижние ролики закреплены на пружинах, таким образом одновременно обеспечивается необходимое натяжение гусениц, а также повышается проходимость робота по неровным поверхностям.
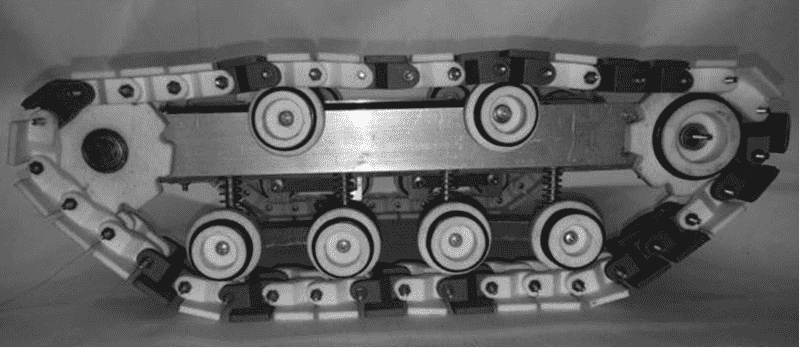
Рисунок 3 – Гусеница в сборе
5. Выбор программируемого контроллера
В качестве контроллера выступает отладочная плата STM32F407VET6, на базе которой построена логика робота.
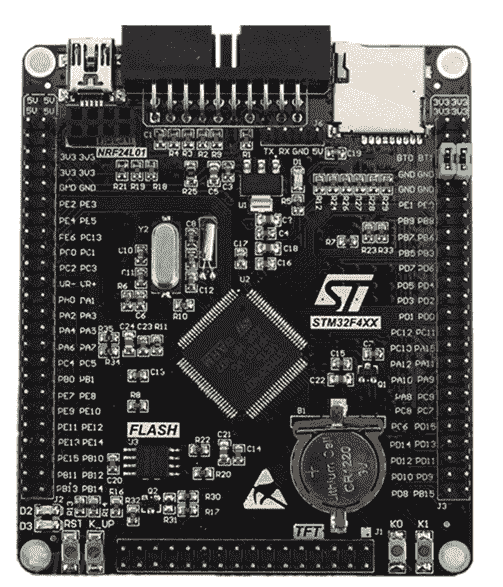
Рисунок 4 – Общий вид отладочной платы
Основные характеристики отладочной платы:
- Микроконтроллер STM32F407VET6 с кварцем на 8 МГц;
- 74 GPIO пина, расположенных на колодках по сторонам платы;
- Специальная колодка 16х2 для работы с TFT;
- Колодка для отладки/программирования 2х10 JTAG/DBG IDE;
- Колодка (мама), для подключения NRF41L01 радиомодуля;
- Слот для mini SD карты памяти;
- Разъем mini USB, с помощью которого можно реализовать подключение платы как виртуальный COM порт. Необходимо предустановить ST VCP driver;
- Четыре кнопки (RST, K_UP,K0, K2);
- Часы реального времени с кварцевым резонатором 32.768 кГц;
- Отдельный чип флеш памяти Winbond 25q16bvsig, которая программируется с помощью SPI1, так же как и nRF2401 (разные CS–пины).
Программирование отладочной платы осуществляется с помощью программного пакета MATLAB, библиотеки Waijung, что значительно упрощает задачу программирования и отладки алгоритмов.
6. Описание двигателей
Первоначальным вариантом тяговых двигателей были двигатели Arduino с пластмассовым редуктором мощность, которых составляло 1Вт, но в процессе увеличения массогабаритных показателей платформы, а также из–за многочисленных люфтов вала причиной которых являлись пластмассовые шестерни редуктора, было принято решение изменить тип двигателя.
Основными критериями для выбора двигателя являлись такие показатели как: стоимость двигателя, большой развиваемый момент, напряжения питания (DC12V), малый ток холостого хода, малый номинальный ток, удобные крепления двигателей, металлический редуктор, а также наличие энкодера, для возможности вычисления скорости, положения, пройденного пути и отработки заданной траектории и др.
На основании вышеперечисленных критериев был выбран двигатель постоянного тока типа JGY371, мощностью 1.5Вт, который оснащен понижающим металлическим редукторам и инкрементальным энкодерам.
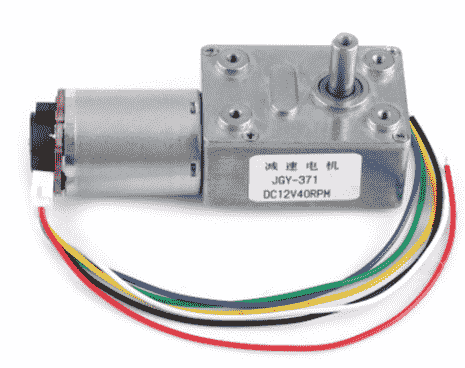
Рисунок 5 – Двигатель постоянного тока JGY371
Номинальное напряжение 12В постоянного тока, скорость на выходном валу составляет 100 об/мин, номинальный крутящий момент 1,5 кг.см, максимальный крутящий момент 6,4 кг.см, передаточное число редуктора 40.
Данные о величине тока были получены экспериментально, ток холостого хода с учетом гусеницы на валу составляет 150мА. Вес двигателя составляет 165 грамм.
Назначение выводов:
- Красный – положительный вывод питания двигателя;
- Белый – отрицательный вывод питания двигателя;
- Синий – положительный вывод питания энкодера ;
- Черный – отрицательный вывод питания энкодера;
- Желтый и зеленый – выводы сигналов обратной связи
7. Описание драйвера
L298 представляет собой интегрированную монолитную цепь с 15–выводами. Это высоковольтный сдвоенный полно проходной драйвер с высоким током, предназначенный для принятия стандартных логических уровней TTL и привода индуктивные нагрузки, такие как реле, соленоиды, постоянный ток и шаговые двигатели. Два разрешающих входа могут включить или отключить устройство независимо от входных сигналов.
Эмиттеры нижних транзисторов каждого моста соединены друг с другом, и соответствующий внешний терминал может быть использован для подключения внешнего чувствительного резистора. Дополнительный вход питания предусмотрен так, что логика работает при более низком напряжении.
Технические особенности:
- Драйвер L298N;
- Медицинское оборудование;
- Напряжение двигателя до 35 В;
- Логическое напряжение: 5 В;
- Размер 44 х 44 х 30 мм.
Описание ввода [6]:
- Vcc – питание двигателя;
- GND – земля;
- OUT1, OUT2 – выход первого канала;
- OUT3, OUT4 – выход второго канала;
- ENA – включение первого канал;
- IN1, IN2 – направление первого канала;
- ENB – включение второго канала;
- IN3, IN4 – направление второго канала.
Внешний вид драйвера L298N приведен на рисунке 6.
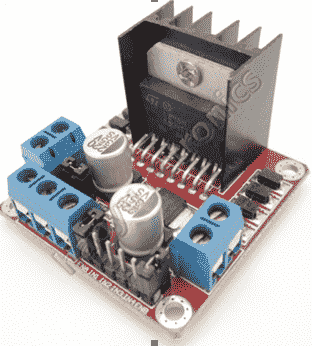
Рисунок 6 – Драйвер L298N
8. Описание модуля Bluetooth
Связь по средствам Bluetooth была выбрана в связи с простотой реализации, она обеспечивает устойчивость к помехам (широкополосным), а это в свою очередь позволяет множеству устройств, которые взаимодействуют друг с другом общаться между собой и не влиять на работу других. Для управления роботом необязательно наличие прямой видимости, что является существенным плюсом, так как глазами робота является web–камера.
Технические характеристики :
- Диапазон частот радиосвязи: 2,4 – 2,48 ГГц;
- Мощность передачи: 0,25 – 2,5 мВт;
- Чувствительность: – 80 dBм;
- Напряжение питания: 3,3 – 5 В;
- Потребляемый ток: 50 мА;
- Радиус действия: до 10 метров;
- Интерфейс: последовательный порт;
- Режимы: master, slave;
- Габариты: 27 x 13 x 2,2 мм.
Подключение
- VCC – (питание 3,6 6 В);
- GND – (земля);
- TXD, RXD – UART интерфейс;
- STATE – индикатор состояния;
- KEY – контакт для входа в режим программирования.
Внешний вид модуля изображен на рисунке 7.
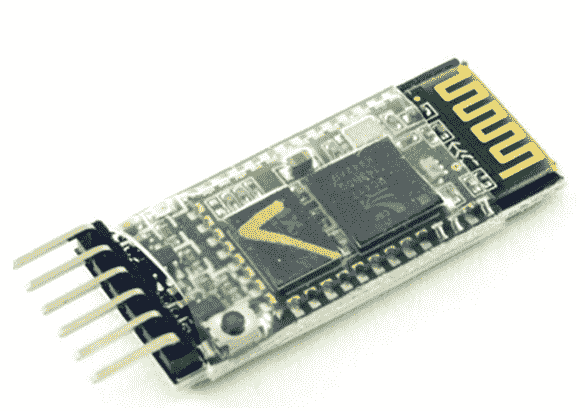
Рисунок 7 – Внешний вид модуля HC–05
9. Принцип работы
Алгоритм работы системы делиться на две части. Каждая часть – это индивидуальная система. Каждая из них имеет вычислительное ядро и Bluetooth модуль.
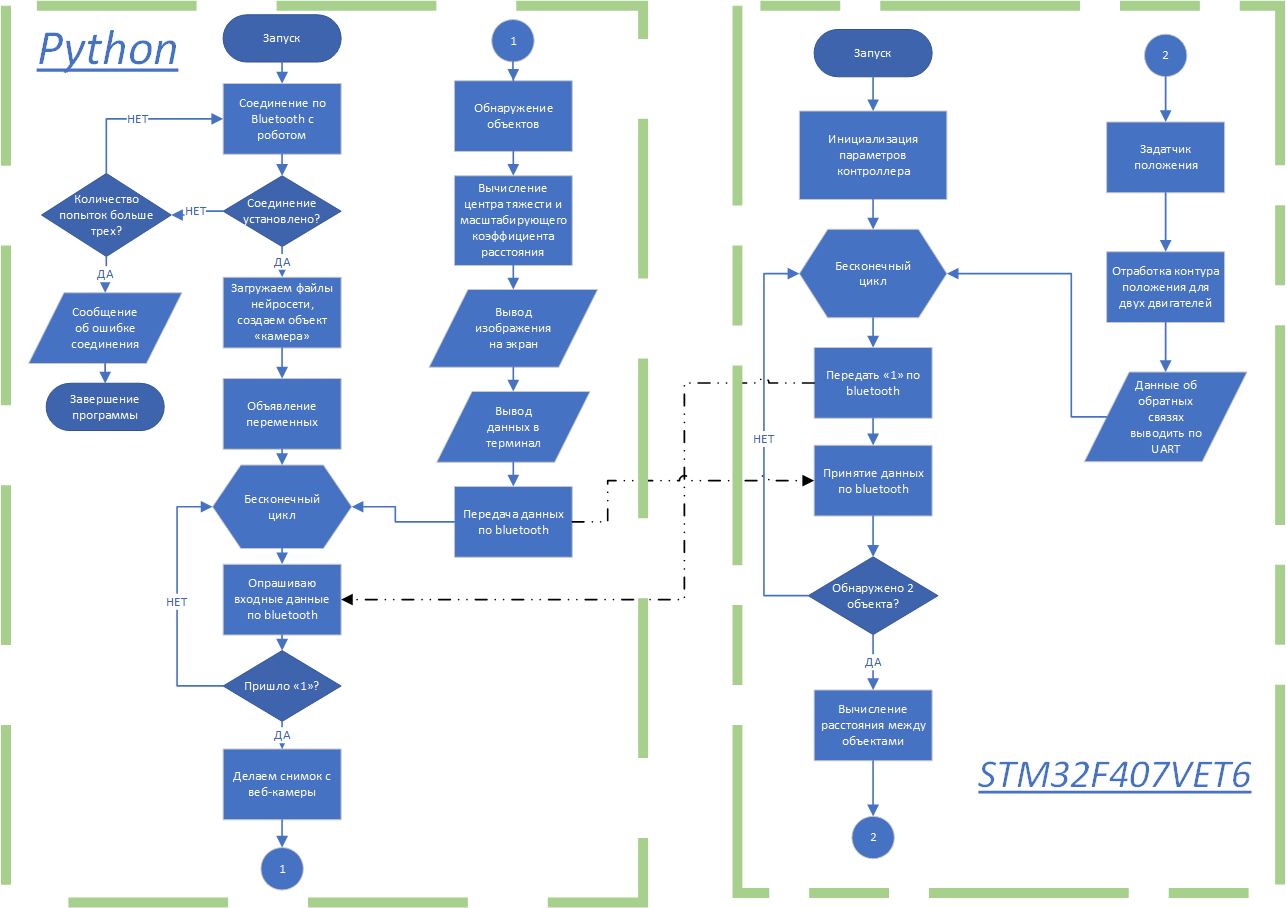
Рисунок 8 – Алгоритм работы системы
Python файл запускается на ПК, подгружает файл структуры нейросети и файл нейросети. Далее по сигналу с контроллера делает снимок с веб – камеры, обрабатывает данные, находит теоретический центр тяжести объектов, при этом если система обнаружила больше двух объектов, она производит выборку и берет за основу те объекты, которые имеет наивысшую вероятность обнаружения. После этих действий данные пересылаются по Bluetooth на контроллер.
Контроллер принимает эти данные, вычисляет реальное расстояние между искомыми объектами, эта информация поступает на задатчик положения, после него на одноконтурную систему положения.

Рисунок 9 – Работа алгоритма обнаружения объектов
(анимация: 6 кадров, 7 циклов повторения, 106 килобайт)
Заключение
Существенным недостатком этой системы является то, что для функционирования этой системы необходимо два вычислительных ядра, а именно: контроллер и ПК.
Качество обнаружения системы и точность определения расстояния между объектами напрямую зависит от количества фотографий объектов в процессе обучения нейросети и от количества эпох обучения. Также на точность работы системы влияет характеристики веб–камеры.
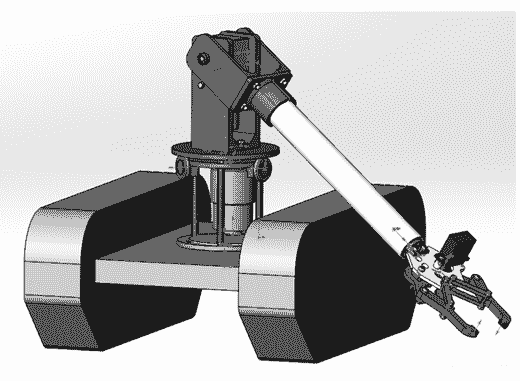
Рисунок 10 – Робот на стадии проектирования
Данная система управления определяет расстояния между объектами при условии, что они находятся на одной прямой, в дальнейшем планируется усложнить систему для того, чтобы определять координаты в плоскости.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: июнь 2021 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
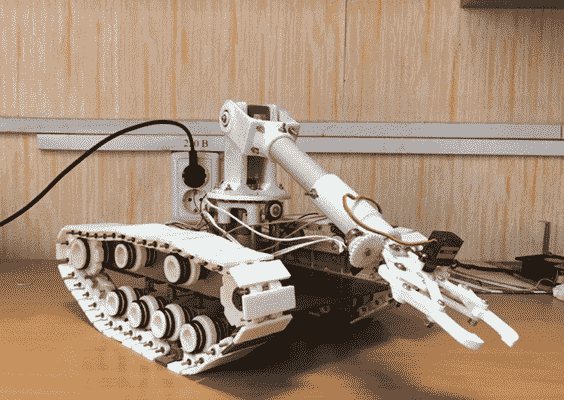
Рисунок 11 – Робот на стадии реализации
Список источников
- Simulink. [Электронный ресурс]. – Режим доступа: https://matlab.ru/products/Simulink
- WaijungBlockset. [Электронный ресурс]. – Режим доступа: http://waijung.aimagin.com/
- Reflective Optical Sensor with Transistor Output, DataSheet № TCRT5000
- DUAL FULL–BRIDGE DRIVER, Electronics Description, DataSheet № L298N
- Eclipse (среда разработки). [Электронный ресурс]. – Режим доступа: https://www.eclipse.org/
- Интерфейсная шина IIC (I2C). [Электронный ресурс]. – Режим доступа: http://easyelectronics.ru/...
- Управление мобильными роботами [Электронный ресурс]. – Режим доступа: https://moluch.ru/...
- STM32F407VE [Электронный ресурс]. – Режим доступа: https://www.st.com/...
- CMOS Rail–to–Rail General–Purpose Amplifiers, DataSheet № AD8541_8542_8544
- Датчик линии HC–05 цифровой. [Электронный ресурс]. – Режим доступа: https://3d-diy.ru/wiki/arduino–moduli/