|
|
Next-Generation Proximity and Position Sensors
Figure 1. The ceramic RF resonator setup is shown with
(G) or without (A) the electronics; the block diagram shows the signal
processing electronics. (B) shows the front end. The electromagnetic wave
enters the resonator through a coupling slot (C), and part of the wave
is coupled out again through a second coupling slot (D). The broadband
detector diode (E) determines its RF power. Adjusting the frequency using
the oscillator (F) determines the resonance frequency detuning causing
by an approaching object, enabling precise measurement of the object's
proximity. This article introduces the next generation of proximity sensors that avoid these disadvantages. The Operating PrincipleThe operating principle (see Figure 1) is based on the frequency detuning of a cylindrical resonator filled with dielectric material. A weak electromagnetic field is generated at radio frequencies (5–6.5 GHz for an M18 size sensor) and coupled into the ceramic-filled cavity (the resonator). Some of this field leaves the cavity at the front; any object in front of this surface reflects the electrical field and couples it back into the cavity. The reflection influences the resonant frequency of the cavity; circuitry detects this frequency shift and electronics evaluate the signal. The surface of this ceramic cylinder is gold-plated, except for the front end facing the object. The distance between this front end and the target is determined using the principle of a waveguide resonator. A part of the line is formed from a dielectrically filled waveguide short-circuited at one end. The other part is formed by the free space and a metallic or dielectric object located in front
Figure 2. The sensor's functional properties are outlined
by a geometrical setup and a simplified equivalent circuit. The electromagnetic
field in the dielectric resonator spreads out to the target. The distance
to the target forms part of the resonance circuit and determines the resonance
frequency. The electromagnetic wave is fed into the resonator via a coupling slot on the gold-plated front end. Through a second coupling slot, a part of the electromagnetic wave is coupled out again and its RF power determined via a broadband detector diode. If an object now approaches the open front end of the resonator, the resonance frequency is detuned. This detuning is determined by changing the frequency of the oscillator, until resonance is detected through an RF power change at the detector diode. Then the frequency sweep of the oscillator is stopped immediately. The frequency that is now set corresponds to the resonance frequency, and the following resonance condition, as shown in Figure 2, applies, where Z1 is the wave resistance in the ceramic, Z2 is the wave resistance from sensor to target, ?1 is the propagation constant in the ceramic, ?2 is the propagation constant from sensor to target, l1 is the ceramic length, and l2 is the distance from sensor to target:
Figure 3. This is the sensor in a typical threaded barrel
configuration. Figure 1G shows the resonator with the assembled RF electronics. These are inserted into the threaded barrel and connected with the interface board as in standard inductive proximity sensors. Figure 3 shows the complete sensor in an M18 size. RF Configuration of the Resonator
= resonant frequency
In this case, the length L of the circular waveguide filled with a dielectric is calculated for a given frequency fr as:
r = 2f = resonant frequency
Simulation of the RF Characteristics
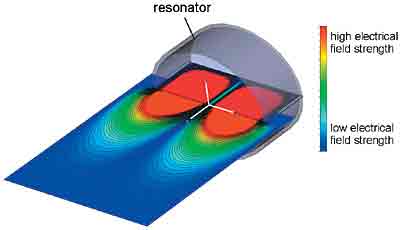
Figure 4 shows the electric field of the sensor for the selected TE011 mode. Figure 4. The electrical field strength shows the sensor
detection area in front of the ceramic RF resonator. Within this area
the change in the resonance frequency decreases exponentially with increasing
distance to the target. The change of the resonance frequency is at equidistant
points in the near field of the sensor, e.g., at 1 mm in the megahertz
region while it goes down to kilohertz in the far field, e.g., at 10 mm.
The longitudinal section illustrates the electric field strength for the case of an “open” resonator (without a target). The logarithmic amplitude of the field can be used to explain the distance relationship shown in Figure 5.
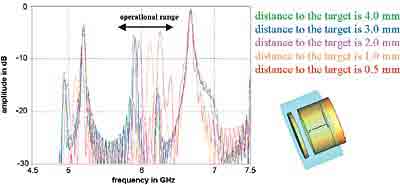
Figure 5. The quality factor of the operational resonance
frequency band for the M18 sensor configuration is plotted for different
target distances. Through loosely coupling the resonator with the transmit/receive
part of the sensor by a horizontal magnetic dipole, a sharp resonance
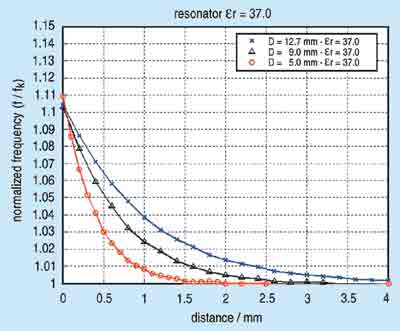
frequency line is achieved. As the distance between the sensor and object increases, the part of the field that can be influenced by the object becomes smaller, as does the effect on the change in the resonance frequency. The propagation constant of the field ? becomes imaginary in the free space (since kc is >r2µ) and so the field subsides exponentially. The change in the resonance frequency also decreases exponentially with distance. The sensor becomes more selective as the distance decreases. Figure 6 shows the simulation results for the sensor range over the normalized resonance frequency shift for three different resonator sizes.
Figure 6. The near field of the sensor detection range
for three different sensor sizes is shown as a simulation result. In the
absolute near field (<1 mm), the sensor has the greatest sensitivity.
The dielectric constant remains unchanged at 37.0. For a resonator with a lower dielectric constant, the gradient of the exponential descent is smaller and the range of the sensor increases. However, the measurement accuracy suffers under a smaller gradient. Test ResultsFigure 7 shows the measured values of the resonance frequency shift of the M18 sensor as a function of distance.
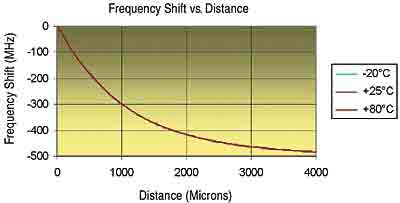
Figure 7. The detection range vs. frequency shift is
shown for several field tests of the M18 sensor at different temperatures.
Over a temperature range of 100°C the accuracy of the measured distance
changes by <4 µm. Temperature dependency of the sensor is avoided by using a temperature-compensated ceramic. Test results are plotted for temperatures of –20°C, 25°C, and 80°C; no visual deviation between the three curves is recognizable. The physical parameters of the sensor are as described before (r=37.5, D=12.7 mm, L=5.5 mm). The maximum resonance frequency occurs with a short-circuited resonator and is ~6.5 GHz with this sensor. The greatest sensitivity is achieved with short distances (objects close to the sensor); as the distance increases, the sensitivity steadily decreases, asymptotically approaching the limit value of the open resonator (lowest frequency). The frequency shift that can be reached here is ~500 MHz. The test results coincide exactly with the theory of Equation 1 and the simulation results of Figure 6. EMC problems, such as those arising with inductive and capacitive sensors (e.g., caused by welding robots), do not occur since the working frequency of the sensor is in the gigahertz range. Environmental conditions such as dust, smoke, waste gases, and high relative humidity of the type occurring in normal industrial conditions do not affect the function of the sensor. All metals can be used as the target objects, and magnetic qualities are not necessary. To calculate the exact distance to the target, you must specify in your order whether the target is metal or dielectric; in the latter case the dielectric constant is required. Further Applications Availability Figure 12. CST–Microwave Studio is a trademark of CST Gesellschaft fьr Computer Simulationstechnik, Darmstadt, Germany.
Figure 8. One typical application for the proximity sensor
is in friction stir welding of aluminum sheets. This picture shows the
robot configuration. A) The measurement object appears within the range of
detection of the sensor
Figure 10. This plot shows the sensor signal in the time
domain during the welding process. The sensor is controlling the penetration
depth of the tool during welding and guarantees a reliable welded joint.
The spectrum in Figure 11 clearly shows the speed of the tool at 49 Hz as the principal maximum level, with higher harmonics reaching higher frequencies. Figure 11. The plot of the sensor signal in the frequency
domain is shown. By controlling the rotational velocity of the tool and
its harmonics the welding process can be optimized and tool wear recognized.
The amplitudes of these harmonics serve directly to determine the degree of the tool’s degree of wear. Very marked harmonics indicate a high degree of tool wear. -------------------------------------------------------------------------------- For information in the U.S., please contact Peter Schmitz, MTS Communication & Sensors, Inc., Chicago, IL, 800-620-2126, pgschmitz@earthlink.net. Первоисточник: www.sensorsmag.com |
|
| |
|

 (3)
(3)