
|
Биография |
Ссылки |
Библиотека |
Поиск |
Гандбол и я |
Отечественная и зарубежная практика показывает, что развитие вспомогательного транспорта идет по пути перехода к бесперегрузочной транспортной системе. Признано целесообразным использование монорельсовые дороги.
Из двух систем монорельсовых дорог – с канатной и локомотивной тягой, следует отдать предпочтение второй, поскольку она обеспечивает более высокую безопасность эксплуатации, возможность работы на разветвленных линиях, бесперегрузочное и бесперецепочное транспортирование и другие преимущества. Тягово-эксплуатационные характеристики монорельсового локомотива могут быть улучшены за счет разработки методики расчета и выбора параметров тягового устройства монорельсового локомотива.
Тяговое устройство, предназначенное для работы в шахтных условиях, должно при сравнительно малой массе локомотива развивать достаточное тяговое усилие для движения поезда. Между конструкцией тягача, его конструктивными параметрами и условиями эксплуатации существует неразрывная связь. Масса транспортируемого груза, профиль пути, обводненность и запыленность выработок, и другие эксплуатационные условия оказывают существенное влияние на работу локомотива, что подтверждает необходимость разностороннего учета этих условий при проектировании и эксплуатации монорельсовых дорог.
При движении монорельсового локомотива в реальных условиях неизбежно возникают колебания его составных частей. Тяговое устройство, кроме полезного движения вдоль оси монорельсового пути, совершает небольшие колебания сложной структуры. Оставаясь малыми по амплитудам, они могут сопровождаться дополнительными силами, действующими на монорельс, приводные и ходовые колеса. Увеличение сил вызывает повышенный износ, деформацию пути, а, следовательно, приводит к снижению безопасности. Следует отметить, что возникающие при этом боковые отклонения могут превышать установленные "Правилами безопасности..." нормы на боковые зазоры и существенно ограничивать скорость движения.
Вопросами монорельсового транспорта занимаются такие ученые: докт. техн. наук B.C. Берсенева, канд. техн. наук Л.И. Айзенштока, А.С Веткина, В.Н. Григорьева, Л.Г. Желтухина, В.М. Мерецкого, М.В. Чашко, а также в.В. Бухановского, Я.В. Щукина [1, 2, 3] и других.
В нашей стране, начиная с 60 годов, разработкой монорельсовых транспортных средств для угольных шахт занимается ряд научно-исследовательских организаций, в числе которых необходимо отметить ВНИИгидроуголь, Гипроуглегормаш, Донгипроуглемаш, ИГД им. А. А.Скочинского, МакНИИ, НПО "Углемеханизация" и др.
Применение монорельсового транспорта для перевозки грузов известно более 150 лет. Однако, в рудничном транспорте его использование начинается с конца 50-х годов в ФРГ, Англии и Франции. На основании выше сказанного следует, что тема данной работы актуальна.
Цель работы – исследовать и обосновать параметры шахтного монорельсового локомотива для проектирования устройства предотвращающего боковое расскачивание, что обеспечит повышение скоростей предвижения локомотивов и увеличит срок службы систем подвешивания и предотвратит искревление пути монорельса.
Для достижения данной цели поставлены следующие основные задачи:
Практическая ценность данной работы состоит в возможности более широкого применения монорельсового транспорта для вспомогательніх работ на горном предприятии, увеличения скорости движения имеющихся монорельсовых локомотивов.
Тяговое устройство монорельсового локомотива позволяет реализовать силу тяги и торможения (в некоторой степени) за счет фрикционной связи приводных колес с монорельсом, которые могут располагаться под монорельсом или сбоку. Для шахтных условий, когда требуются значительные усилия прижатия, более предпочтительным является установка с вертикальной осью вращения и принудительным прижимом к вертикальной стенке монорельса по обе стороны. Подобная схема использована в отечественных локомотивах ДМВ-7,2-ДМД, а также зарубежных - "Шарф"DZ 66-3",
Шарф BZ 43-2-21" ( ФРГ ), "Ля-Стефанауз" ( Франция ) [ 28 ], ZL -90 ( ПНР ) [ 25 ],LZH-50 ( ЧССР ) / 29 , где используется электрический, гидравлический или пневматический приводы [4].
Указанные машины позволяют создать универсальный транспорт, особенно для вспомогательных грузов угольных шахт. При этом транспортирование может осуществляться без перегрузов и перецепов на значительные расстояния ( до 4...6 км). В этом направлении проведен ряд работ.
Наиболее подробно результаты научных исследований по созданию монорельсовых локомотивов приводятся в работах B.C. Берсенева[5], посвященных разработке теоретических основ тяговых устройств с автоматическим регулированием давления приводных колес на рельс в зависимости от сопротивления движению поезда.
Исследованы особенности уравновешивания нормальных реакций рельса, приложенных к приводным колесам, принимая по внимание, что сила тяжести всего тягового устройства во много раз меньше этих реакций, рассмотрены условия, при которых обеспечивается равнове¬сие, исследовано влияние собственных сопротивлений тягового меха¬низма на процесс создания тягового усилия. Исходя из характера и соотношения внешних сил, определены особенности механизма.
Дано описание типов тяговых устройств, проанализированы особенности работы различных конструкций, даны методы расчета и определены коэффициенты полезного действия.
Как указано автором, в работе [6] не рассматриваются вопросы вписывания тягового устройства в закругления пути, а также не учитывается его боковое раскачивание, которое неизбежно возникает при движении по монорельсу. В работах Л.И. Айзенштока [1, 2] приведены результаты исследования профиля монорельсового пути как источника колебаний подвижного состава и установлены аналитические зависимости возмущений и их параметры. Определены факторы, влияющие на величины боковых отклонений монорельсового составa
Однако в этих работах не учитывается влияние места расположения и степени прижатия приводных колес локомотива к монорельсу.
Основным направлением работ А.С. Веткина [7] явились исследования процесса вписывания подвижного состава. Полученные закономерности не могут быть использованы для определения параметров тягового устройства, так как они относятся к прицепной части состава. Следует отметить, что, невзирая на большое количество публикаций, посвященных вопросам создания монорельсовых локомотивов, опубликованных в советской и зарубежной литературе, не существует определенной методики, позволяющей однозначно определить основные параметры монорельсовых дорог. Первые попытки в обобщении этих вопросов принадлежат В.Н. Григорьеву. На основании широких исследований им выявлены основные конструктивные схемы тяговых устройств, определены рациональные области применения монорельсовых дорог, рассмотрены вопросы влияния конструк¬тивных особенностей монорельсового локомотива на параметры движения, о возможной скорости движения поезда и достаточной мощности локомотива, а также о способе регулирования привода.
Исследования, проведенные Л.Г. Желтухиным, посвящены нахождению оптимальных параметров подвешивания подвижного состава шахтной подвесной монорельсовой дороги, выявлению харак¬тера взаимодействия вагонетки со стыками монорельса. В указанных работах не отражены вопросы взаимодействия приводных колес тягового устройства с монорельсом, а это не позво¬ляет их использовать в настоящей работе. На основании анализа конструкций монорельсовых тягачей З.М.Мерецким выявлены основные требования к их конструкциям, определен рациональный тип привода. Основные положения этой работы не воздействий.
Проведенные исследования М.В. Чашко посвящены созданию рудничных монорельсовых локомотивов с линейным индукционным двигателем. Как показали исследования, целесообразно применять на скоростях, значительно больших, чем 2 м/с, что в настоящий момент для шахтных условий является сложным. При этом требуется такое состояние рельсового пути, где профиль не имел бы резких перегибов и превышений в стыках. Основным достоинством локомотива с линейным двигателем является то, что его тяговое усилие не зависит от коэффициента сцеп¬ления приводного элемента с рельсовым путем. Коэффициент сцепления - величина непостоянная, зависящая от многих условий. 3 настоящее время существует много гипотез, объясняющих физический процесс реализации тягового усилия приводными колесами. Однако, все они противоречивы и не позволяют определить значение расчетным путем, то есть чисто теоретически. Для тяговых расчетов принято использовать экспериментальные данные. В ранее указанных работах приведены результаты исследований коэффициента сцепления приводных колес с монорельсом, причем каждый из авторов дает его значение реально для индивидуального эксперимента, не проводя соответствующей статистической обработки, не учитывая внешних условий, влияющих на значение этого коэффициента. В связи с этим, указанные значения могут быть использованы в малой степени в качестве обобщенных для тяговых расчетов при различных условиях эксплуатации монорельсовых дорог. Наиболее широко проблемы применения монорельсовых дорог в промышленности изложены в работах[2]. Приведенные данные применимы для транспортных средств, работающих в стабильных усло¬виях, но для тяжелого состояния транспортной дороги, присущего угольным шахтам, нуждаются в проверке и подлежат уточнению. Кроме этого, в указанных работах не приведены рекомендации по выбору жесткой базы тягового устройства, диаметра и числа приводных колес, а также типа прижимного устройства.
Определенный интерес представляют работы института ВНИИгидроуголь, посвященные созданию подвесных монорельсовых локомотивов с дизельным приводом. За период с 1967 года по 1977 год разработаны три типа дизелевозов ДМВ, которые имеют тяговое усилие 7, 30 и 55 кН. Последний (ДМВ-7) имеет мощность 55,7 кВт и предназначен для доставки грузов массой до 7 т по выработкам с углами наклона до 35°. В описанных работах основным направлением является создание тягового устройства с объемным гидроприводом и недостаточно проработан вопрос о непосредственной связи тягового блока с монорельсом, разработан ряд методик, позволяющих в широких пределах производить выбор параметров. Однако для обоснованного создания завершенной конструкции шахтного монорельсового локомотива их недостаточно.
Расчетная схема и принятые допущения
Наиболее подробное исследование процессов бокового раскачивания монорельсового подвижного состава проведено Л.И. Айзенштоком [1, 2]. Однако им не учтено влияние на амплитуду раскачивания места расположения приводных колес.
Тяговое устройство монорельсового локомотива, по аналогии с расчетной схемой, принятой в работе [1], можно представить в виде одномассовой динамической модели (рис. 1). Здесь для упрощения тяговое устройство представлено как неподрессоренный экипаж. Скорость движения принимается постоянной. Колея ходовых колес, ввиду ее малости, полагается равной нулю, а рама с приводом осматривается как твердое тело, имеющее продольную плоскость симметрии и двухточечную систему подвески. Неуравновешенность и гидроскопические моменты вращающихся масс трансмиссии и двигателя равны нулю. Приводные колеса прижимаются к вертикальной стенке монорельса с усилием, прямо пропорциональным коэффициенту жесткости прижимного механизма.
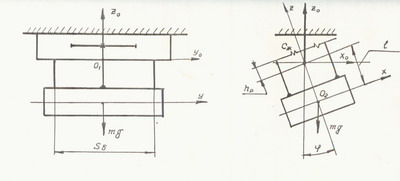
Рисунок 1 – Одномассовая динамическая модель
В расчетной схеме учитывается, что при колебаниях в месте контакта приводных колес с монорельсом возникает момент сил трения. Сам монорельс, вследствие высокой изгибной и поперечной жесткости, принимается неподвижным при движении по нему тягового устройства. Масса кареток ввиду ее малости не учитывается. Рассматривается движение только одиночного экипажа, чем устраняется действие сцепок.
Для параметров тягового устройства введены следующие обозначения: m - приведенная масса, l - расстояние от центра масс до точек подвеса, hр - расстояние от продольной оси пружин прижимного механизма до точек подвеса, Сж - коэффициент жесткости пружин прижимного механизма.
В качестве основной системы отсчета выбраны декартовы координатные оси Хо, Yо и Zо, имеющие начало в точке О1, расположенной посередине расстояния между передними и задними каретками. При движении тягового устройства ось Zо все время остается вертикальной, ось Yо направлена в сторону движения по оси прямолинейного монорельса, а ось Хо - перпендикулярна к плоскости, проходящей через оси Zо и Yо .
В качестве вспомогательной системы координат выбраны декартовы оси X, Y и Z, начало которых помещено в центр масс перемещающегося тягового устройства. В статическом равновесии оси основной системы Хо и Yо параллельны осям X и Y, а оси Zо и Z - совпадают.
При поступательном
движении монорельсового локомотива система ХYZ относительно системы Х0Y0Z0
совершает повороты на углы  вокруг оси Y0 и на углы
вокруг оси Y0 и на углы  вокруг оси Z0,
которые приняты в качестве сообщенных координат. Причиной появления колебаний
при движении по прямым участкам являются неровности пути, которые согласно [1]
можно описать функциями возмущения в горизонтальной плоскости
вокруг оси Z0,
которые приняты в качестве сообщенных координат. Причиной появления колебаний
при движении по прямым участкам являются неровности пути, которые согласно [1]
можно описать функциями возмущения в горизонтальной плоскости
 (1)
(1)
 (2)
(2)
где: - угол излома осей смежных секций в горизонтальной плоскости;
- угол излома осей смежных секций в горизонтальной плоскости;
L – длина секции монорельса;
W – частота возмущения, 
 - время запаздывания
второй по ходу движения пары ходовых колес по сравнению с первой;
- время запаздывания
второй по ходу движения пары ходовых колес по сравнению с первой;
n = 1, 2, 3 ...
Аналогично описываются
функции возмущения от вертикальных неровностей пути Ф3(t) и Ф4(t), где
вместо угла учитывается угол
излома в вертикальной плоскости пути  .
.
Исследование факторов, влияющих на боковые отклонения тягового устройства
Математической модель тягового устройства при движении по монорельсу с неровностями, которое отличается от известных тем, что учитывает наличие приводных колес, взаимодействующих с вертикальной стенкой монорельса:
 (3)
(3)
Где: В приведенном уравнении (3), возникающие вынужденные колебания обусловлены
действием возмущений от горизонтальных и вертикальных неровностей монорельсового
пути, для решения и исследования полученного уравнения используем принцип
суперпозиции [8], который позволяет раздельно рассматривать влияние на боковое
раскачивание тягового устройства в каждой плоскости. При отсутствии вертикальных
неровностей, когда При отсутствии горизонтальных
неровностей, когда Для основной гармоники
возмущений, когда n = 1, уравнение (5) можно представить в виде: где: Анализ уравнения (6)
показывает, что первое слагаемое описывает собственные затухающие колебания,
которые зависят от начальных условий. При нулевых начальных условиях это
слагаемое равно нулю. Второе слагаемое характеризует собственные затухающие
колебания, возникающие при наезде на неровности, в установившемся режиме
действуют вынужденные колебания, которые описываются остальными слагаемыми
уравнения. Как показали исследования
Л.И. Айзенштока [1], вертикальные возмущения оказывают малое влияние
на раскачивание. Выполненные исследования, проведенные автором при помощи ЭВМ,
подтверждают эту точку зрения. Поэтому, в дальнейшем эти возмущения не
рассматриваются. Анализ полученного уравнения (6) показывает, что
амплитуда боковых колебаний Рисунок 2 -Зависимость амплитуды от скорости движения Переходим к анализу влияния параметров тягового устройства.
К ним можно отнести: приведенную массу Рисунок 3 - Зависимость амплитуды от массы тягового устройства На рис. 3 показаны зависимости амплитуды бокового раскачивания от массы
тягового устройства, от параметров прижимного механизма при скорости 3 м/с
и длине секции монорельса 3м. Если увеличение массы m приводит сначала к
резкому, а затем при более 2500кг, постепенному росту амплитуды Рассмотрим влияние жесткой базы Рисунок 4 - Зависимость амплитуды раскачивания от жесткой базы Из приведенного на этом рисунке графика
зависимости Принято считать, что
где Для тяговых устройств с радиусом инерции
Полученные смешения не превышают установленные "Правилами безопасности…" нормы на боковые зазоры в выработках, которые составляют при скорости более 1 м/с
0,3м и значительно меньше значений, приведенных в работе [1].
Это объясняется тем, что в отличие от указанной работы, в расчете
учитывалось действие приводных колес, которые прижимаются к вертикальной
стенке монорельса с усилием, пропорциональным коэффициенту жесткости прижимного
механизма и, что в их месте контакта возникает момент сил трения. Следует отметить, что если
принять коэффициент жесткости равным 0, то полученные уравнения (3) и (4) приобретают вид, как и в работе [1]. Определим дополнительные нагрузки, вызванные раскачиванием, которые будут
действовать на приводные колеса тягового устройства прямо пропорционально
коэффициенту межосевого расстояния При повороте оси рамы
тягового устройства на угол Следовательно,
при раскачивании тягового устройства на угол 0,092 рад усилие прижатия
приводных колес увеличивается, примерно, на 4 %. Указанное превышение
хотя и относительно мало, но его необходимо учитывать при определении
фактических удельных напряжений в месте контакта приводных колес с монорельсом. Биография Ссылки Библиотека Поиск Гандбол



 = 0 уравнение (3) принимает вид
= 0 уравнение (3) принимает вид (4) = 0, имеем:
(4) = 0, имеем: (5)
(5) (6)
(6) (6)
(6) зависит от ряда
параметров монорельсового пути и тягового устройства.
На рис. 2 приведены графики зависимости от скорости
движения при различной длине секции монорельса, рассчитанные
при следующих данных: = 0,035 рад,
зависит от ряда
параметров монорельсового пути и тягового устройства.
На рис. 2 приведены графики зависимости от скорости
движения при различной длине секции монорельса, рассчитанные
при следующих данных: = 0,035 рад,  = 0.1м,
= 0.1м,  = 0,060м,
hp = 0,063м,
= 0,060м,
hp = 0,063м,  = 4x103 кг,
= 4x103 кг,  = 22x103 кг.м2,
= 22x103 кг.м2,  = 0,064с .
Значения входящих параметров принимались согласно характеристикам
существующих монорельсовых дорог 2ДМД, ДМКУ и данных [1].
= 0,064с .
Значения входящих параметров принимались согласно характеристикам
существующих монорельсовых дорог 2ДМД, ДМКУ и данных [1].

сначала увеличивается, а затем уменьшается в несколько раз по отношению к
максимум. Так, при движении со скоростью менее 5 м/с по монорельсу с
длиной секции L=3 м максимальному значению =0,043 рад соответствует
скорость 1,2 м/с, а при L = 6 м значению = 0.108 рад - скорость 2,2
м/с. Дальнейшее увеличение длины секции приводит к смещению максимума из
зоны рабочих скоростей, ограниченной «Правилами безопасности...». Однако
для криволинейных выработок с увеличением параметра L неизбежно будет расти и
угол перекоса между смежными секциями , от которого также зависит
амплитуда . График этой зависимости приведен также на рис. 2. Из
графика видна пропорциональная зависимость между боковыми отклонениями
и углом перекоса при =10°.
C увеличением угла в два раза, практически,
во столько же раз увеличивается и амплитуда раскачивания. Поэтому увеличение
длины секции монорельса более 6м является не целесообразным. ,
коэффициент жесткости Сж, предварительное натяжение пружин
прижимного механизма , жесткую базу
Sб и расстояние от центра масс тягового устройства до точек подвеса
.
. , то
увеличение коэффициента жесткости Сж и натяжения - к ее снижению.
При увеличении Сж в 2 раза амплитуда снижается практически в 1,8
раз, а при увеличении в 2 раза - примерно на 7...8%. Влияние
последнего фактора менее весомо и он практически не влияет на .
Жесткость прижимного механизма является одним из параметров, изменением
которого возможно влиять на величину бокового отклонения. Как следует из
расчетов, при увеличении Сж снижение отклонений происходит во всем диапазоне
рабочих скоростей.  и
расстояния на раскачивание (рис.4).
и
расстояния на раскачивание (рис.4).
 следует, что при увеличении жесткой базы с 0,6м до 1,0м
амплитуда уменьшается с 0,0074 рад до 0,0062 рад или с 0,42° до 0,36°,
что составляет примерно снижение на 9 %. Изменение расстояния влияет более
существенно, причем в зависимости от момента инерции , может как увеличивать
боковое отклонение , так и уменьшать.
следует, что при увеличении жесткой базы с 0,6м до 1,0м
амплитуда уменьшается с 0,0074 рад до 0,0062 рад или с 0,42° до 0,36°,
что составляет примерно снижение на 9 %. Изменение расстояния влияет более
существенно, причем в зависимости от момента инерции , может как увеличивать
боковое отклонение , так и уменьшать.
 - радиус инерции тягового устройства относительно продольной оси Y,
проходящей через центр масс. Для монорельсовых тяговых устройств может
быть равным 0,1…2,0. Графики зависимости
- радиус инерции тягового устройства относительно продольной оси Y,
проходящей через центр масс. Для монорельсовых тяговых устройств может
быть равным 0,1…2,0. Графики зависимости  радиуса приведены на
рис. 4. Анализ графиков показывает, что для малых значений ,
равных не более 0,8, с увеличением расстояния от 0,2м до 0,9м амплитуда
бокового отклонения увеличивается не превышая 0,092 рад. При дальнейшем
повышении параметр
уменьшается до 0,03 рад. Для устройств, у которых
более чем 2,0, с увеличением расстояния амплитуда ?у растет незначительно и не
превышает при = 1,4…1,6м 0,02 рад. Следует отметить, что для существующих
локомотивов расстояние = 0,9 м является предельным, поскольку ограничивается
габаритами сечения горных выработок. Следовательно, линейное боковое смещение
радиуса приведены на
рис. 4. Анализ графиков показывает, что для малых значений ,
равных не более 0,8, с увеличением расстояния от 0,2м до 0,9м амплитуда
бокового отклонения увеличивается не превышая 0,092 рад. При дальнейшем
повышении параметр
уменьшается до 0,03 рад. Для устройств, у которых
более чем 2,0, с увеличением расстояния амплитуда ?у растет незначительно и не
превышает при = 1,4…1,6м 0,02 рад. Следует отметить, что для существующих
локомотивов расстояние = 0,9 м является предельным, поскольку ограничивается
габаритами сечения горных выработок. Следовательно, линейное боковое смещение  составит
составит
 около 0,2...0,4 м, согласно рис. 4, это смещение будет не более
около 0,2...0,4 м, согласно рис. 4, это смещение будет не более

 ось вращения приводных колес повернется на этот
же угол. Тогда, согласно уравнению (7), коэффициент для колес диаметром
D = 0,2м и шириной В = 0,1 м будет
ось вращения приводных колес повернется на этот
же угол. Тогда, согласно уравнению (7), коэффициент для колес диаметром
D = 0,2м и шириной В = 0,1 м будет
ВЫВОДЫ
менее 0,8 м2 наиболее подвержены влиянию расположения центра масс
(то есть расстояния от центра масс до точек подвеса).
Для уменьшения амплитуд его необходимо располагать ближе к
опорной поверхности ходовых колес. Для тяговых устройств с
более высокими значениями радиуса инерции, расположение центра – масс менее
существенно и практически не влияет на боковое раскачивание.
СПИСОК ССЫЛОК