| RUS | UKR | ENG | ДонНТУ | Портал магистров ДонНТУ |
 |
Фоменко Артём ВладимировичФакультет инженерной механики и машиностроения
|
| О себе | Библиотека | Ссылки | Отчет о поиске | История звукозаписи |
| Реферат на тему выпускной работы |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ВведениеГлавную роль в развитии промышленности Украины играет топливно-энергетический комплекс. Функционирование и развитие топливно-энергетического комплекса Украины в значительной степени предопределяются состоянием и развитием угольной промышленности, которая широко распространена в нашем регионе.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 (3)
(3) (4)
(4) (5)
(5) (6)
(6) (7)
(7) (8)
(8) (9)
(9)
 (10)
(10) (11)
(11) (12)
(12) (13)
(13) (14)
(14) (15)
(15) (16)
(16) (17)
(17) (18)
(18) (19)
(19) (20)
(20)
 (21)
(21) [8]
[8] 

| Напряжение питания (частотой 50Гц), В |
|
|
ДКПУ-12 |
660/380/127
|
|
ДКПУ-22 |
380/220/127 |
|
Потребляемая мощность, В•А, не более |
20 |
|
Рабочий зазор между первичным преобразователем
и объектом контроля, мм, не более |
160 |
|
Время срабатывания датчика,
с, не более |
0,1 |
|
Количество контактов выходных реле |
2р, 2з |
|
Масса, кг, не более |
|
|
Блока БИ-1 |
33 |
|
Блока БИ-2 |
3,7 |
|
Преобразователя ПП-2 |
1,6 |
|
Магнита МПП |
1,6 |
|
Габаритные размеры, мм |
|
|
Блока БИ-1 |
420х380х350 |
|
Блока БИ-2 |
145х215х175 |
|
Преобразователя ПП-2 |
220х160х75 |
|
Магнита МПП |
230х60х75 |
|
ТУ 12.48.190-85 |
|
Для управление устройствами предлагаю применить комплектный регулируемый электропривод постоянного тока с микропроцессорным управлением серии РЭП2-ШПМ.
Комплектное устройство предназначено для управления электродвигателем постоянного тока шахтных подъемных машин и других механизмов, требующих регулирования скорости в широких пределах.
Назначение комплектного привода - для новых электроприводов ШПМ и модернизации действующих ШПМ.
РЭП2-ШПМ является новым поколением специализированных регулируемых электроприводов постоянного тока, предназначенных для ШПМ.
Отличительные особенности:
• новые схемотехнические и конструктивные решения по силовой части якорного преобразователя и возбудителя, позволившие их существенно упростить, уменьшить в габаритах, по весу, при одновременном повышении надежности (при сохранении резервирования и других "наработанных" позитивных решений серии УКТЭШ);
• новые унифицированные микропроцессорные системы управления преобразователем, возбудителем и приводом, в целом (с учетом технологии). Следует отметить, что последнее решение является унифицированным для электроприводов ШПМ любых типов- постоянного и переменного токов.
Привод шахтной подъемной машины РЭП2-ШПМ обеспечивает следующие характеристики:
• разгон, торможение и реверсирование подъемного электродвигателя (длительность разгона, торможения до 30 с);
• вращение электродвигателя с установившейся скоростью вращения, ее поддержание и регулирование в диапазоне 75:1;
• статическая точность поддержания скорости при применении прецезионного тахогенератора и изменении момента нагрузки от нуля до номинального до 1% на максимальной скорости и до 5% - на минимальной;
• формирование рабочей диаграммы скорости как треугольного, так и трапецеидального типа с заданным ускорением (замедлением) и ограничением рывка;
• ограничение скорости нарастания и спадания тока электродвигателя;
• бесступенчатое задание скорости при ручном управлении;
• допустимые перегрузки по току в зависимости от их длительности и в соответствии с техническими условиями на двигатели и тиристорные агрегаты;
• виды управления - ревизия, ручное, автоматическое (для клетевых ШПМ - лифтовый режим управления с осуществлением маневровых операций на горизонтах, для скиповых = по сигналам разгрузки-загрузки сосудов с возможностью отработки режима постановки ШПМ на отбой);
• учет характера груза ("груз", "люди", "оборудование", "ревизия") по информации с пульта;
• автоматическое регулируемое предохранительное торможение при наличии дискового тормоза; диапазон регулируемого замедления предохранительного торможения 0,75 - 5,0 м/с2 при точности отработки 25%;
• защиты, предусмотренные правилами безопасности на шахтах и рудниках;
• блокировки, запрещающие неправильные действия по управлению машиной;
• аварийную, запретную, оперативную, предупредительную сигнализации.
Технические характеристики электропривода
|
Наименование параметра |
Pазмерность |
Величина |
|
Напряжение питающей |
кВ |
6 или 10 |
|
Номинальный выпрямленный
ток |
А |
1600, 2500, 3200, |
|
Номинальное выпрямленное |
В |
440, 600, 750, 930 |
|
Напряжение трехфазной сети |
В |
380 |
|
Напряжение тиристорного |
В |
440 |
|
Номинальный ток возбудителя |
А |
100, 200, 320, 500 |
|
Диапазон регулирования |
|
75:1 |
|
Точность поддержания |
% |
1,0 |
По способу реверсирования электродвигателя электроприводы изготовляются в двух исполнениях: с реверсированием тока в цепи якоря и реверсированием тока в цепи возбуждения.
По количеству двигателей: однодвигательные и двухдвигательные.
В комплект электроприводов входят:
1. Цифровой электропривод.
2. Шкаф выпрямителя Ш.
3. Шкаф управления аппартуры технологической автоматики, защиты и сигнализации.
4. Щит управления вспомогательными приводами.
5. Шкаф управления тормозом, датчика стопорения и защиты от переподъема.
Силовая часть РЭП2-ШПМ конструктивно представляет собой щит, состоящий из шкафов напольного исполнения двухстороннего обслуживания. Электропривод шахтного подъема РЭП2-ШПМ может быть укомплектован сухими или масляными трансформаторами производства ОАО "Укрэлектроаппарат" (г. Хмельницкий, Украина), ОАО "Запорожтрансформатор" (г. Запорожье, Украина) или их аналогами.
Оборудование РЭП2-ШПМ установленное на шахте "Новая" г.Желтые воды мощностью 3750 кВт (5000 А, 750 В)

Рисунок 7 - Слева направо - шкаф системы управления приводом, шкаф ввода 1-я секция , шкаф силовой , шкаф ввода 2.-я секция, возбудитель.

Рисунок 8 - На переднем плане два шкафа -2-я секция ввода и возбудитель [10]
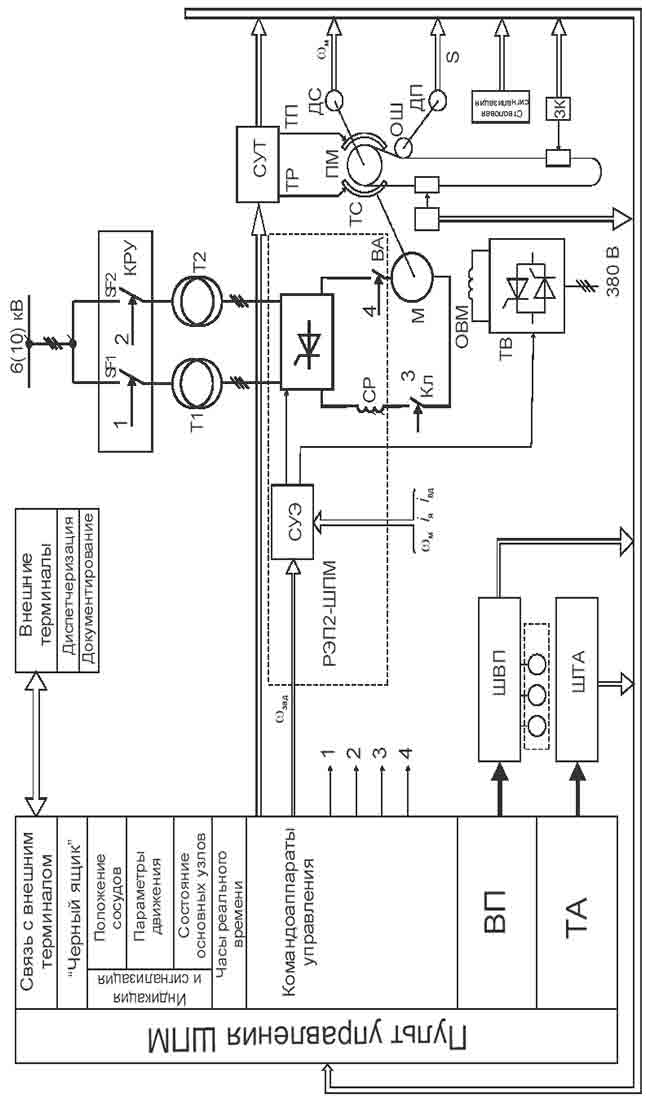
Рисунок 9 - Структурная схема РЭП2-ШПМ [1]
Рисунок 10 - Схема переключения устройств
(анимамация, объем - 62,5 Кб, состоит из 8 кадров,
9 повторений, сделана в Adobe ImageReady)
Литература
1. Электроприводы для шахтных подъемных машин мощностью от 630 до 6300 кВт\Укрэлектросервис\Харьков, Украина[Электронный ресурс]/ http://rotor.in.ua/mkeelektropriv3.php.
2. Шахтный подъем: Научно-производственное издание \ Бежок В.Р., Дворников В.И., Манец И.Г., Пристром В.А.; общ.ред. Б.А. Грядущий, В.А. Корсун.-Донецк: ООО "Юго-Восток,Лтд",2007.-624 с., 494 ил., 233 библиогр.
3. Еланчик Г.М., Проходцева Е. А. Шахтные стационарные установки. МИРГЭМ, 1964.
4. Флоринский Ф.В. Динамика шахтного подъемного каната. Под ред. Савина Г.Н. М.: Углетехиздат, 1958 г. 239 с.
5. Завозин Л. Ф. Шахтные подъемные установки. Изд. 2-е переработ. И доп. М., "Недра", 1975, 368 с.
6. Калиш С.И., Чебаненко К.И. Справочник машиниста шахтной подъемной машины. - М.: Государственное научно-техническое издательство литературы по горному делу, 1962.
7. Динамические режимы рудничного подъема \ В.Е. Католиков, А.Д. Динкель . - М. : Недра, 1995 . - 448с.
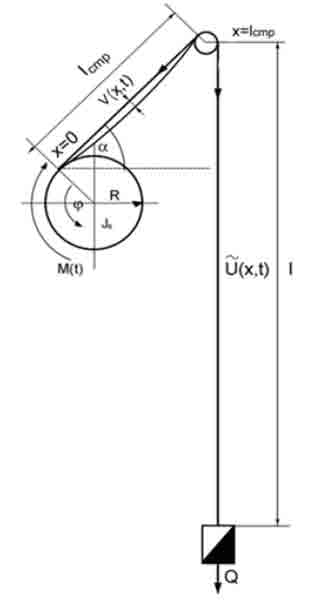
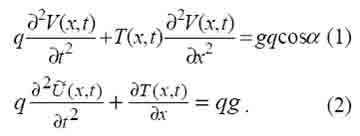
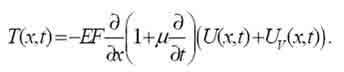
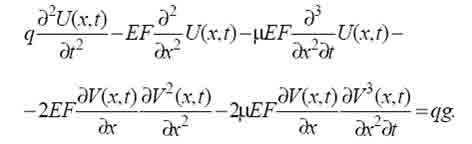
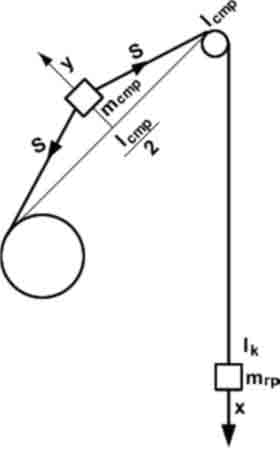
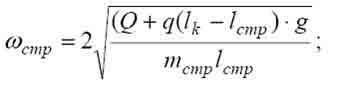
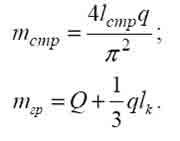
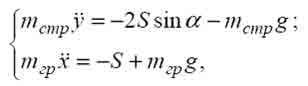
8. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ НЕЛИНЕЙНЫХ КОЛЕБАНИЙ СТРУНЫ И ОТВЕСА КАНАТА МОБИЛЬНОЙ ПОДЪЕМНОЙ УСТАНОВКИ
Ильин С.Р., канд. техн. наук, с.н.с.,
Самуся С.В., аспирант, Институт геотехнической механики
им Н.С.Полякова НАН Украины[Электронный ресурс] \ www.nbuv.gov.ua/portal/natural/Npdntu/Gir/2008_16_142/St17.pdf
9. MKE - Электроприводы и преобразователи частоты[Электронный ресурс] / http://www.mke.com.ua/?p=29&till=&secure=&lang=.
10. Делком Украина — Датчики контроля положения унифицированные ДКПУ ⁄ Каталог продукции ⁄ Продукция [Электронный ресурс] \ http://delcom.com.ua/production/catalogue/dkpu/.
11. В.Н. Потураев, А.Г. Червоненко, Л.В. Колосов и др. Вертикальный транспорт на горных
предприятиях // М.: Недра, 1975. - 351с.
| ДонНТУ | Портал магистров ДонНТУ | Реферат | Библиотека | Ссылки | О себе | История звукозаписи |