Tout au long de son existence,
l'humanité a essayé d'améliorer, de
faciliter leur travail. Au stade actuel de développement de
ces problèmes sont presque résolus. Il y avait
des systèmes automatisés qui sont
utilisés dans différents domaines de
l'activité humaine. La plupart de ces systèmes
entre dans la catégorie des robots.
Aujourd'hui, les robots sont progressivement
pénétrer toutes les sphères de la vie
humaine - de robots installés dans le lieu de travail,
où ils ont maîtrisé une
variété de professions - à partir de
soudage à la peinture des carrosseries, des robots ont
atterri sur Mars, et ils ont progressivement
pénétrer dans les maisons des gens, bien que
principalement comme un danger jouets. Cependant, le
développement de robots ne s'arrête pas pendant
une minute, et le plus intéressant, mais en même
temps, et l'une des tâches les plus difficiles est
d'apprendre le mouvement des robots sur les jambes de deux, trois,
quatre ou six.
Actuellement, les systèmes de gestion basé sur
des réseaux de neurones sont développent.
Vous pouvez voir un grand nombre de
systèmes d'exploitation gérés sur la
base du neurone, ganglion, ou un réseau complexe de neurones
à couches multiples.
Développement de la commande électrique s'applique aux
systèmes àdes dizaines de watts, qui sont
utilisés dans la commande électrique des robots mobiles, des robots humanoïdes, et d'autres.
Il est urgent de la tâche de créer des algorithmes
pour le contrôle de modules mécatroniques pour
atteindre les meilleurs résultats de la dynamique du robot
et les processus dynamiques dans le moteur d'entraînement.
1.2 But et objectifs
OBJECTIF DU TRAVAIL MAGISTERE basé sur le développer d'un algorithme de
commande pour le robot mobile Koala basé des réseaux de neurones.
Le principal objectif de travail
Enquête sur le robot mobile Koala est le point de
départ pour le développement de la robotique
à l'Université technique nationale de Donetsk.
Ayant l'objet désiré, qui est en fait un robot,
il devient possible:
examiner l'ensemble du système pour le contrôle de
robots mobiles, les éléments de base et
accessoires, y sont inclus;
utiliser des extensions MATLAB logiciel Simulink pour la simulation de
commande électrique et système de
contrôle de robot mobile;
études expérimentales du système
d'entraînement électrique pour le travail des
tâches communes sur la vitesse et de position;
description mathématique des processus d'interaction entre
le plomb et le soutien des roues avec le sol des
caractéristiques différentes;
études expérimentales du système
d'entraînement électrique de robot mobile pour les
différentes caractéristiques de l'environnement,
en utilisant différents capteurs;
examen et l'élaboration d'algorithmes pour la motion de
robot mobile basée sur les réseaux neuronaux;
examen des algorithmes de contrôle pour robot manipulateur
Katana dans l'interaction avec l'environnement;
imposer des restrictions sur les caractéristiques du
mouvement du robot mobile avec une charge massive;
tiser robot manipulateur de commande algorithme
utilisant l'accéléromètre trois axes;
fusion de l'algorithme de commande du robot manipulateur
basé sur le réseau de neurones pour l'interaction
humaine.
1.3 Valeur pratique
Un algorithme développé pour réaliser
l'interaction humaine avec l'organe exécutif du robot
humanoïde sans efforts inacceptables au contact et
à réduire la durée de la phase
d'oscillation de l'interaction processus.
2 Partie
générale
2.1 Multicouches systèmes neuronals
Notre environnement est vitale - un monde de diversité des
systèmes - écologiques, biologiques, techniques,
économiques et sociaux.
La théorie du contrôle classique a
réussi à maîtriser les techniques
plutôt rigide influence extérieure
centralisée sur les différents objets et les
processus. Il y avait un besoin urgent de trouver des moyens de cibler
l'impact des processus dans les systèmes non
linéaires.
Particulièrement efficace est l'utilisation de tels
systèmes, réseaux de neurones multicouches dans
une application de gestion de nouveaux problèmes ne se
prêtent pas aux méthodes traditionnelles. C'est ce
qui explique une des caractéristiques importantes qui
distinguent réseaux de neurones multicouches: leurs
propriétés d'approximation universelle, une
grande capacité d'apprentissage, le traitement
parallèle, les signaux analogiques et numériques,
etc Ces propriétés de ces réseaux,
système de réseau de neurones peut
générer automatiquement des algorithmes de
contrôle efficaces qui ont un haut degré
d'adaptation paramétrique et structurelle de l'environnement
et les objectifs de gestion en évolution.
Développé par les auteurs et exprimée
en
[1]. Théorie et algorithmes d'apprentissage de réseaux
de neurones multicouches avoir en elle une application
spécifique pour la synthèse de
systèmes de contrôle neural réseau
à l'aide d'études de modélisation
directe et inverse. Très prometteuse est l'utilisation de
ces réseaux pour construire de nouvelles classes de
systèmes de réseau de neurones basé
sur les idées de la théorie du contrôle
synergique. Synergetics peut donner une réponse claire
à la question méthodologique, pourquoi sont
simples lois de la physique est un excellent travail dans notre
environnement est le monde très complexe et la rendre ainsi
possible de décrire de manière fiable tout
à fait différents
phénomènes. Le fait est que les
systèmes dynamiques naturelles qui ont de nombreux
degrés de liberté est l'auto-organisation. Son
essence réside dans le fait que la physique (chimiques,
biologiques) procédé permet de produire plusieurs
degrés principaux de liberté, de
paramètres d'ordre appelé, qui, après
un certain temps « ajusté » tous les autres degrés
de liberté des systèmes naturels complexes. Un
tel « ajustement » être traité comme un
« principe de superposition » nouvelle pour les
systèmes non linéaires comme un moyen de
construire des structures complexes à partir de
pièces simples. En règle
générale, le nombre de paramètres
d'ordre est faible, ce qui nous permet de décrire et
d'explorer le système dynamique complexe. Dans la
stratégie de la théorie du contrôle
synergique réalisé l'auto - organisation est la
formation et l'entretien des invariants extérieur et
intra - dynamiques. Selon les objectifs imposés par les
invariants peut être constant ou variable, cela signifie que,
respectivement, le régime de stabilisation dynamique du
système ou le déplacer vers un nouvel
état dynamique. Dans le premier cas, dire la langue
biologiques, la mise en œuvre des invariants du
système de « stabilisation » et la seconde
— la « dynamique » de sélection. En
d'autres termes, la création
délibérée d'invariants dynamique
permet pour les systèmes d'auto - organisation.
Développé en [1] la théorie et des méthodes de synthèse
des systèmes de réseau de neurones sans aucun
doute trouver leur application pour la construction des
systèmes de contrôle de pointe et des
installations mobiles à des fins diverses. Ainsi, le domaine
évident d'application des systèmes de
réseau de neurones est la robotique, en particulier dans les
tâches complexes de conduite et de l'adaptation mobile robots
à des incertitudes et des anti - environnement. Dans ce cas,
les éléments de l'intelligence artificielle,
introduites dans la structure des systèmes de
contrôle de robots mobiles peut être
fondée sur l'union d'une approche synergique, et des
algorithmes d'apprentissage des réseaux de neurones
multicouches, qui sont utilisés comme contrôleurs
de l'auto - apprentissage. Cette approche permet la synthèse
d'auto - apprentissage des algorithmes de contrôle pour les
robots mobiles à travers l'objectif de former l'architecture
des réseaux de neurones multicouches basée sur la
formation fonctionnelle et les objectifs de contrôle
correspondants.
2.2 L'histoire du dèveloppement de robots mobiles
Robotique mobile — un mécanisme automatisé
pour déplacer dans un milieu donné
[2].
Le notion du robot Karel Capek a inventé en 1920 pour
« RUR ». (Rossum's Universal Robots) — la
pièce scientifique.
En 1942, Isaac Asimov a inventé les 3 lois de la robotique
dans la narration « Runaround ».
Pendant la Seconde Guerre mondiale, 1939-1945 les premiers robots
mobiles sont le résultat des progrès
technologiques en informatique et la cybernétique. Ils
sont les bombes volantes qui sont produit une explosion de la charge
dans le diapason donné des coordonnées
spécifiées. Fusées V1 et V2
étaient des prototypes de « pilote
automatique » et un système de
détonation automatique. Ils étaient les
ancêtres des missiles de croisière modernes.
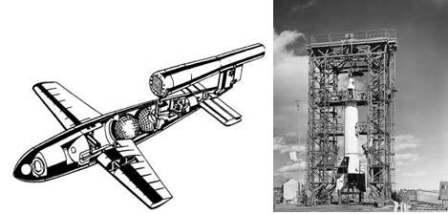
Figure 1 — Apparition de la « bombe volante » et les fusées V2
En 1970, a été conçu par Stanford
« panier en ligne »suiveur, un robot mobile qui
pourrait suivre le blanc
ligne, en utilisant des informations provenant de la caméra.
Il avait une radio avec un énorme
système informatique, qui a effectué les calculs
nécessaires
[3].
Vers la même époque (1966-1972) StanfordInstitut
de recherche de la Construction mène des recherches
Robot « Shakey le robot », équipé d'une
caméra
télémètre, bump capteurs et
l'unité radio
[4].
« Shakey »
a été le premier robot qui peutraison de ses
actions. Dans le même temps, l'Union soviétique
explore
la surface lunaire à l'aide d'un robot mobile
« Lunokhod - 1 ».
En 1976, son programme « Viking » NASA envoie deux
engins spatiaux non habités vers Mars.
En 1995, un robot mobile programmable
« Pioneer » devient disponible dans le commerce, ce
qui permet largement exploré
le domaine de la robotique et de développer l'enseignement
universitaire.
Les robots mobiles sont de plus un élément
standard de l'université
programme.
Companie iRobot Corporation
Depuis la fin de 1980 Laboratoire d'intelligence artificielle de
l'Institut Technologie du Massachusetts a joué le premier
rôle dans le développement mondial
robots. Ces robots ont été simulées
sur la base du comportement des insectes, et
fondée sur ce travail plus tard, mis au point toute une
industrie — Étude
Comportement du robot
[5].
iRobot Corporation En 1990, il fonde le professeur visé à l'Institut
du Dr Rodney Brooke (Rodney Brooks) et des spécialistes en
robotique Colin Angle (Angle Colin) et Helen Greiner (Helen Greina).
Colin Angle est un pionnier dans le développement de robots
mobiles, et son travail sur la création de robots avec un
comportement adaptatif pour des projets liés à
l'expédition de recherche de la NASA vers Mars, qui a
déjà été
mentionné plus tôt.
En 1999, « Sony » est un robot — un
chien « Aibo », qui est capable de voir, marcher et
interagir avec l'environnement.
En 2004, jouet robot biomorphique
« Robosapien », développé par
Mark Tilden est disponible pour les acheteurs.
100 robots moniles travaillent ensemble dans projet « Le projet Centibots » pour faire une carte de l'environnement
et identifier les objets.
En 2008, « Boston Dynamics » publié des
vidé de nouvelle génération de
robot mobile « BigDog »,
la capacité qui peuv marcher sur le terrain de glace et de
rétablir l'équilibre
état avec extérieure substantielle influences
perturbatrices.
En 2009, le marché ukrainien quitte l'entreprise avec iRobot
Corporation avec les modèles adaptés et officiellement
certifié pour le
Marché européen. Moins de ce sont les vendeurs informelles.
À ce jour, nous avons un système complexe unique
avec de nombreux degrés de liberté, il est
très résistant à diverses surfaces,
même lorsque l'impact physique sur eux.
2.3 Classification et d'application des robots mobiles
Par type d'environnement dans lequel le robot mobile mobile:
–un terrain ou un robot domestique. Les plus courantes sont
faitesmontée sur roues, cependant, peut être
attribuée à cette catégorie de robots,
ayant deux ou plusieurs segments (les animaux de type humain);
– robots aériens, qui sont généralement
liés à ne pas servir les véhicules de
transport aérien;
– Robots sous - marins ont généralement le nom de
véhicules autonomes sous-marins.
Par voie de motion de robot mobile:
– robot avec des jambes: jambes humanlike ou zhivotnopodobnye pieds;
– robot à roues.
2.4 Robots mobiles montès sur les roues
Actuellement, il ya environ 300 robots mobiles à roues
produites par des entreprises étrangères. Dans le
cadre de ce travail est effectué par un aperçu et
une analyse comparative des robots seul mobile capable de se
déplacer dans un environnement donné au moyen de
roues
[6].
Robots qui ont participé à la liquidation de
l'accident de Tchernobyl. Robot de transport
spécialisé (RTS - 1) est un appareil
légendaire et bien connu, a pris une part active dans le
nettoyage de Tchernobyl toit dans les décombres
d'éléments hautement radioactifs du
réacteur détruit. Le robot a
été opéré au niveau des
rayons gamma de fond des rayons X jusqu'à 3000 par heure.
Dans certains endroits (au bas du nombre tube de ventilation 2), les
niveaux de rayonnement atteint 10.000 roentgen par heure.Avec elle fut
sauvée par l'irradiation d'environ 1000 personnes, qui doit
être utilisé pour effectuer cette
opération
[7].

Figure 2 — Robot de transport spécialisé (RTS - 1)
Fauteuils roulants — un dispositif pour les personnes qui ne peuvent se
déplacer comme temporaire (pour cause de maladie), et en
raison de leur handicap, mais capable d'être en position
assise. 2 types principaux: un homme marchant avec un
étranger et un homme mû par une
[8].
2.5 Robot mobile Koala
Figure 3 — La vue gênêrale du robot Koala et des moteurs è courant continu
(140 КБ, 4 videos, 5 cycles)
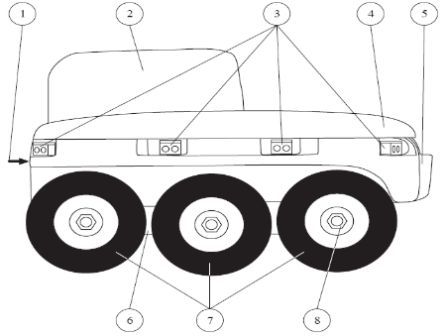
Figure 4 — L'apparence et la position des principaux êlêments du robot Koala
1.Le module de contrôle et les indicateurs clés.
2. Housse de protection.
3. Capteurs infrarouges.
4. La partie supêrieure du corps.
5. La partie avant du corps.
6. Fixations de roue.
7. Roues.
8. Fixations de roue.
Le système de gestion
Chaque roue est entraînée par un moteur
électrique à courant continu relié aux
roues par un engrenage avec le coefficient de transmission 58,5:1. Un
codeur incrémental est situé sur l'arbre du
moteur et produit 100 impulsions par tour complet de l'arbre moteur.
Cela implique la réception de 5.850 impulsions par tour de
roue, ce qui correspond à 22 impulsions dans le
millimètre lors du déplacement du robot vers
l'avant.Robot processeur principal dispose d'une gestion
directe de puissance, le moteur et peut lire le codeur
incrémental supplémentaires, en utilisant une
unité spéciale appelée UPP (Universal
Pulse Processor). Il peut également afficher des
informations sur un courant de chaque moteur, qui est proportionnelle
au couple des roues.
La tension appliquée à moteur peut
être réglée par le
processeur principal d'alimentation et de déconnexion de la
fréquence donnée et en une période
déterminée. Fréquence de
commutation de base est constante et suffisamment
élevée pour le moteur ne répond pas
à un seul commutateur. Ainsi, le moteur répond
à la tension moyenne appliquée, qui peut
être modifié par la période de
correction, du moteur dans un état ON. Cela implique
que les changements que le rapport entre les périodes d'ON et OFF, comme le montre sur la Figure 5. La valeur de la PWM est
définie comme le temps pendant lequel le moteur est dans un
état ON.
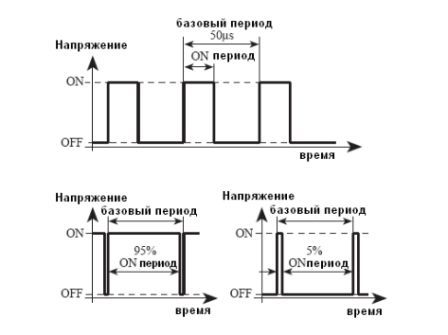
Figure 5 — Tension PWM en fonction du rapport entre le moment de ON et la pleine
période. Fréquence de commutation de base est
constante
Valeurs PWM peut être réglée
directement ou peut avoir son propre contrôleur du moteur.
Contrôleur du moteur peut améliorer la gestion de la
vitesse et de la position du moteur, ajuster la valeur PWM en fonction de la
vitesse réelle, lu sur le capteur incrémental.
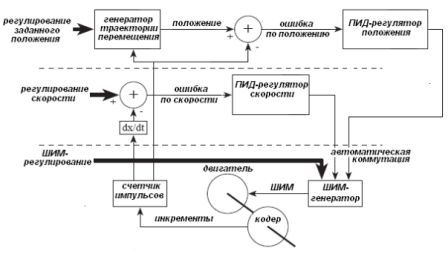
Figure 6 — Système de gestion du moteur
Deux moteurs à courant continu peut être
régulée par régulation PID - régulateur,
effectué sur le programme du processeur principal
[9]. Chaque membre du contrôleur (proportionnel,
intégral, différentiel) est compatible avec une
constante qui définit le poids de
l'élément: pour les proportionnelle à
l'intégrale d'un différentiel.
Le contrôleur peut être utilisé dans
deux modes: régulateur de vitesse et régulateur
de position. Mode de contrôle actif est défini en
fonction du type de la commande spécifiée. Si le
régulateur reçoit une commande de régulation de position , le régime de commande passe à un
contrôleur de régulation de potion.
Dans le régime de régulation de la vitesse a une valeur d'entrêe de vitesse de roue et maintient cette vitesse roues. Changement de vitesse est aussi rapide que possible, dans n'importe quelle direction. Il n'ya aucune restriction sur la vitesse dans ce mode n'est pas fourni.
Dans le rêgime de l'organisme de rêglementation a des spêcifications d'entrêe pour la position de la roue, l'accêlêration et vitesse de pointe. En utilisant ces valeurs, le contrêleur accêlêre la roue jusqu'à ce que la roue atteint une vitesse maximale et ralentit de faêon à parvenir à une situation donnêe. Ce mouvement est effectuê sur un trapêze, comme le montre la Figure 8.
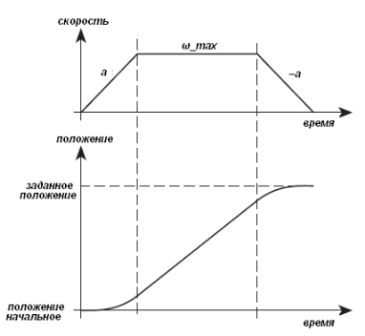
Figure 7 — Forme trapézoïdale de la vitesse avec une
accélération et une vitesse maximale de parvenir
à une situation donnée
2.6 La modèlisation mathèmatique du robot mobile Koala
Le robot est équipé de moteurs à
courant continu deux a été simulée
système de contrôle et de débogage pour
robot mobile Koala dans un système de coordonnées
différent lors de la présentation de diverses
affectations.
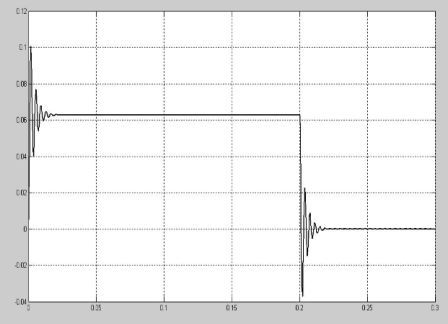
Figure 8 — Graphique de l'évolution des courants
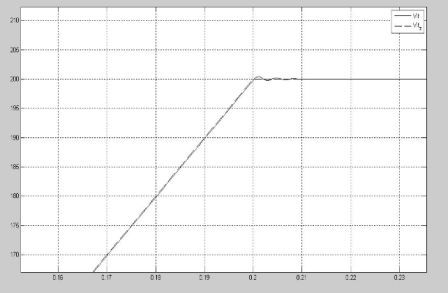
Figure 9 — Les changements d'horaire avec le dépassement de vitesse

Figure 10 — Le changement d'horaire de la position et l'angle de l'axe de rotation

Figure 11 — Calendrier des courants transitoires de la roue droite et
gauche

Figure 12 — Les graphiques des phênomènes transitoirs des vitesses de la roue droite et
gauche
3 Conclusion
3.1 Rèsultats
À la suite de ce travail a été
étudiée algorithme Braytenberga
[10], qui est, le mode de démonstration de commande du robot
mobile Rob système modélisé, fait son
déboguage.
3.2 Recherches suivantes
Dans le futur, nous envisageons d'étudier
supplémentaires robot codeurs. Il est également
prévu de se joindre capteur de gaz, un capteur de distance
laser, capteur d'humidité, capteur de
température, sonde de fumée, détecteur
de rayonnement pour l'étude des algorithmes pour le
mouvement du robot avec différents modèles de
capteurs pour les différentes caractéristiques
environnementales. Prévues une description
mathématique des processus d'interaction des roues en plomb
et de soutien avec le sol de caractéristiques
différentes. Il est également
nécessaire de considérer l'algorithme du robot
Koala en coopération avec un Katana manipulateur.
Lors de l'écriture de ce maître de
l'œuvre abstraite n'est pas encore terminée. La
réalisation définitiveTexte intégral
Décembre 2011 de l'ouvrage et de matériaux sur le
sujet peuvent être obtenus auprès de l'auteur ou
son
gestionnaire après cette date.

 Russe
Russe Ukrainienne
Ukrainienne