Реферат за темою магістерської роботи
Зміст
1. Вступ
1.1 Актуальність
1.2 Цілі і задачі роботи
1.3 Практичная цінність
2. Основна частина
2.1 Багатошарові нейронні системи
2.2 Історія розвитку мобільних роботів
2.3 Класифікація та галузі використання мобільних роботів
2.4 Мобільні роботи на колісному ходу
2.5 Мобільний робот Коала
2.6 Математичне моделювання мобільного робота Коала
3. Заключна частина
3.1 Висновок
3.2 Подальші дослідження
Перелік посилань
1. Вступ
1. 1 Актуальність
Протягом свого існування людство намагалось удосконалюватися, робити легшим свій труд. На сучасному етапі розвитку ці задачі практично вирішені. З'явилися автоматизовані системи, які використовуются в самих різноманітних галузях людської діяльності. Більшу частина таких систем відносять до категорії роботів.
Роботи сьогодні поступово проникають у всі сфери життя людини — роботів встановлюють на виробництві, де вони освоїли самі різноманітні професії — від зварення до фарбування кузовів автомобілей, роботи вже висадилися на Марсі, і поступово вони проникають і в будинки людей, пока головним чином у якояті невинних іграшок. Однак розвиток роботів не зупиняється ні на хвилину, і найбільш цікавою, но в той же час і однією з найбільш складних задач є навчання роботів руху на двух, трьох, чотирьох чи шести кінцівках.
В наш час стрімко розвиваються системи керування на базі нейронних мереж. Можно побачити багато діючих систем, керованих на базі нейрона, ганглія або складної нейронної мережі з декількому шарами.
Розвиток електропривода розповсюджується на системи потужністю до десятків Ватт, які використовуються в електроприводах мобільніх роботів, людиноподобних роботів та інших.
Актуальною є задача створення алгоритмів керування мехатронними модулями для досягнення найкращих показників зі сторони динаміки руху робота і динамічних процесів в приводному двигуні.
1.2 Цілі і задачі роботи
МЕТОЮ МАГІСТЕРСЬКОЇ РОБОТИ є розробка алгоритма керування мобільним роботом Коала на базе нейронних мереж.
ОСНОВНІ ЗАДАЧІ РОБОТИ
Дослідження мобільного робота Коала є відправною точкою для розвитку робототехніки в Донецькому національному техніченому університеті. Маючи необхідний об'єкт, тобто, власне робота, з'являється можливість:
вивчити всю систему керування мобільним роботом, основні елементи і допоміжне обладнання, що входить до його складу;
використовувати розширення Simulink програмного пакета MATLAB для моделювання електропривода і системи керування мобільного робота;
експериментальних досліджень системи електропривода при відпрацювуванні типових завдань на швидкість і положення;
математичного опису процесів взаємодії головних і допоміжних колес з грунтом різних характеристик;
експериментальних досліджень системи електропривода мобільного робота для різних характеристик навколишнього середовища, з використаннях різних давачів;
обзора і розробки алгоритмів руху мобільного робота на базе нейронних мереж;
обзора алгоритмів керування маніпулятором робота Катана при взаємодії з навколишнім середовищем;
встановити обмеження на характеристики руху мобільного робота з массивним вантажем;
синтезувати алгоритм керування маніпулятором робота з використанням трьохосевого акселерометра;
синтеза алгоритма керування маніпулятором робота на базе нейронной мережі для взаємодії з людиною.
1.3 Практичная цінність
Розробленний алгоритм дозволить реалізувати взаємодію людини з виконавчим органом гуманоїдного робота без неприпустимих зусиль при контакті і при зменшені тривалості коливальний процесу фази взаємодії.
2. Основна частина
2.1 Багатошарові нейронні системи
Середа життєдіяльності, що нас оточує, — це світ різноманітних систем — екологічних, біологічних, технічних, економічних і соціальних.
Класичная теорія керування успішно освоїла методи жорсткого централізованного зовнішнього впливу на різні об'єкти і процесси. Возникла актуальная потребность поиска путей целевого воздействия на процессы в нелинейных системах.
Особливо ефективним є застосування таких систем багатошарових нейронних мереж в нових прикладних проблемах керування, які не поддаються вирішенню традиційнними методами. Це пояснюється важливими відзначними характеристиками багатошарових нейронних мереж: їх універсальними апроксимаційнними властивостями, високою здатністю до навчання, паралельній обробці аналогових і дискретних сигналів і т.д. Відмічені властивості таких мереж дозволяють нейросетевим системам автоматно формувати ефективні алгоритми керування, які мають високий ступінь параметричної і структурної адаптації до зовнішнього середовища і задачі керування, що змінюються.
Розроблені авторами і викладені в [1] теорія і алгоритми навчання багатошарових нейронних мереж отримали в ній конкретне застосування для синтеза нейросетевих систем керування з використанням прямих і зворотніх моделей навчання. Дуже перспективним є застосування цих мереж для будуванян нових класів нейросетевих систем на основі ідей синергетичної теорії керування. Синергетика дозволяє дати ясну відповідь на методологічний вопрос, чему достатньо прості закони фізики добре працюють в оточуючому нас дуже складному світі і тим самим дають можливість дуже достовірно описати різноманітні явища. Все діло в тому, що в динамічних природніх системах, які мають багато ступенів свободи, відбувається самоорганізація. Її суть полягає в тому, що в фізичних (хімічних, біологічних) процесах виділяються деякі головні ступіні свободи, які називаються параметрами порядка, до яких через деякий час "підлаштовуються" всі інші ступені свободи складної природної системи. Таке "підлаштовування" можна трактувати як новий "принцип суперпозиції" для нелінійных систем, як спосіб сборки сложних структур з простих частин. Звичайно число параметрів порядка невелике, що дозволяє описати та дослідити складну динамічную систему. В синергетичній теорії керування стратегія направленої самоорганізації є в формуванні та подтримці зовнішньо- і внутрішньосистемних динамічних інваріантів. В залежності від поставленних цілей інваріанти, які вводять, можуть бути постійнними або такими, які змінюються, що означає стабілізацію динаміченого режима системи або ж переход її в новий динамічний стан. У першому випадку, кажучи біологічним мовою, системні інваріанти реалізують "стабілізуючий", а в другому — "динамічний" відбори. Іншими словами, цілеспрямоване формування динамічних інваріантів дозволяє здійснити спрямовану самоорганізацію систем.
Розвинені в [1] теорія і методи синтезу нейромережевих систем безсумнівно знайдуть своє застосування для побудови перспективних систем управління технологічними і рухомими об'єктами різного призначення. Так, очевидною областю застосування нейромережевих систем є робототехніка, зокрема в складних задачах керування транспортними і мобільними роботами з адаптацією до невизначеностей та протидії зовнішнього середовища. У цьому випадку елементи штучного інтелекту, що вводяться в структуру систем управління мобільними роботами, можуть базуватися на поєднанні синергетичного підходу та алгоритмів навчання багатошарових нейронних мереж, які використовуються в якості самообучающихся регуляторів. Такий підхід дозволяє реалізувати синтез самообучающихся алгоритмів керування мобільними роботами шляхом об'єктивного формування архітектури багатошарових нейронних мереж на основі функціонала навчання і відповідних цілей управління.
2.2 Історія розвитку мобільних роботів
Мобільний робот — це автоматичний механізм, здатний
пересуватися в заданому середовищі [2].
Поняття робот придумав Карел Чапек у 1920 році для "R.U.R". ("Універсальні роботи Россума") — науково-фантастичної п'єси.
У 1942 Айзек Азімов винайшов 3 закону робототехніки в оповіданні "Хоровод".
Під час Другої світової війни 1939-1945 перші мобільні роботи з'явилися в результаті технічного прогресу по інформатика і кібернетика. Це були літаючі бомби, робили вибух заряду в певному діапазоні від заданої координати. Ракети V1 і V2 були прототипами "автопілота" і системи автоматичної детонації. Вони були предками сучасних крилатих ракет.
Рисунок 1 — Зовнішній вид "літаючої бомби" і ракети V2
У 1970 був розроблений Стенфордський "Cart line
follower", мобільний робот, який міг стежити за білою
лінією, використовуючи інформацію від камери. Він мав радіозв'язок з величезним
обчислювальним комплектом, який виконував необхідні розрахунки [3].
Приблизно в цей же час (1966-1972) Стенфордський
науково-дослідний інститут будівництва проводить дослідження
робота "Shakey the Robot", оснащеного фотоапаратом,
далекоміром, датчиками рельєфності і блоком радіозв'язку [4].
"Shakey" був першим роботом, який може
міркувати про свої дії. У той же час Радянський Союз досліджує
поверхню Місяця з використанням мобільного робота
"Луноход-1".
У 1976 році у своїй програмі "Viking" НАСА
відправляє два безпілотних космічних апарата на Марс.
У 1995 програмований мобільний робот "Pioneer"
стає комерційно доступним, що дозволяє широко досліджувати
область робототехніки та розвивати університетську освіту.
Мобільні роботи стають стандартною частиною університетської
програми.
Компанія iRobot Corporation
З кінця 1980 року Лабораторія Штучного Інтелекту Інституту Технологій в Массачусетсі відіграє провідну роль у світі з розробки роботів. Ці роботи моделювалися на основі поведінки комах, і на базі цієї роботи пізніше розвинулася ціла галузь — Вивчення Поведінки Роботів [5].
iRobot Corporation iRobot Corporation в 1990 році заснував професор згаданого Інституту Доктор Родні Брук (Rodney Brooks) і фахівці з робототехніки Колін Енгл (Colin Angle) і Елен Грейнер (Helen Greine). Колін Енгл є піонером розробки мобільних роботів, і його робота зі створення роботів з адаптивним поведінкою для проектів NASA пов'язана з дослідницькою експедицією на Марс, про яку вже згадувалося раніше.
В 1999 "Sony" представляет робота — собаку
"Aibo", який здатний бачити, ходити і взаємодіяти з навколишнім середовищем.
У 2004 іграшковий біоморфний робот "Robosapien",
розроблений Марком Тілденом є доступний для покупців.
В проекті "The Centibots Project" 100 автономних
роботів працюють разом, щоб зробити карту незнайомого навколишнього середовища та ідентефікувати об'єкти в ній.
В 2008 році "Boston Dynamics" випустила відео кадри нового покоління мобільного робота "BigDog",
здатного ходити по крижаній місцевості та відновлювати рівноважний стан при істотних зовнішніх впливах, що збурюють.
У 2009 році на український ринок виходить компанія iRobot Corporation з моделями адаптованими і офіційно сертифікованими для європейського ринку. Мінус цього — з'явилися неофіційні продавці.
На сьогоднішній день ми маємо унікальні складні системи з великою кількістю ступенів свободи, дуже стійких на різного роду поверхнях навіть при фізичній дії на них.
2.3 Класифікація й області застосування мобільних роботів
За видом навколишнього середовища, в якому рухається мобільний робот:
– наземний або домашній робот. Найбільш часто зустрічаються виконані на колісному ходу, однак можуть бути віднесені до цього класу роботи, які мають дві і більше ноги (людиноподібні, твариноподібні);
– повітряні роботи, яких зазвичай відносять до повітряних транспортних засобів, які не обслуговують;
– підводні роботи зазвичай мають назву автономних підводних транспортних засобів.
За способом руху мобільного робота:
–робот з ногами: людиноподібні ноги або твариноподібні ноги;
– робот з колесами.
2.4 Мобільні роботи на колісному ходу
В теперішній час налічується приблизно 300 мобільних роботів на колісному ходу, вироблених зарубіжними фірмами. У рамках даної роботи виконується короткий огляд та порівняльний аналіз тільки мобільних роботів, здатних пересуватися в заданому середовищі за допомогою коліс [6].
Роботи, які брали участь у ліквідації аварії на ЧАЕС. Спеціалізований транспортний робот (СТР-1) — це легендарний і загальновідомий апарат, який брав активну участь в очищенні даху ЧАЕС від завалів високорадіоактивних елементів зруйнованого реактора. Робот експлуатувався при рівнях гамма-фону до 3000 Рентген на годину. У деяких місцях (біля основи вентиляційної труби № 2) рівні випромінювання доходили до 10000 Рентген на годину.
З його допомогою вдалося вберегти від опромінення близько 1000 людей, які було потрібні для виконання цієї роботи.
[7].

Рисунок 2 — Спеціалізований транспортний робот (СТР-1)
Інвалідне крісло-коляски — пристосування для людей, які не мають можливості рухатися як тимчасово (через хворобу), так і через інвалідність, але здатних перебувати в сидячому положенні. 2 основні види: людина пересувається за допомогою сторонньої людини і людина пересувається самостійно. [8].
2.5 Мобільний робот Коала
Рисунок 3 — Зовнішній вигляд робота Koala
(140 КБ, 4 кадри, 5 циклів)
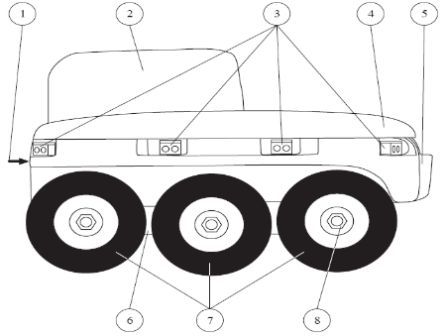
Рисунок 4 — Зовнішній вигляд і розміщення основних частин робота Koala
1.Модуль управління і основні індикатори.
2. Захисне покриття.
3. Інфрачервоні сенсори.
4. Верхня частина корпусу.
5. Лицьова частина корпусу.
6. Кріплення коліс.
7. Колеса.
8. Кріплення коліс.
Система керування
Кожне колесо приводить в обертання двигуном постійного струму, з'єднаного з колесом через передавальний механізм з коефіцієнтом передачі 58,5:1. Інкрементний енкодер розташований на валу двигуна і видає 100 імпульсів за повний оборот валу двигуна. Звідси слідує отримання 5850 імпульсів за оборот колеса, що відповідає 22 імпульсам в міліметр при переміщенні робота вперед.Головний процесор робота має пряме управління живленням двигуна і може зчитувати імпульси інкрементного енкодера, використовуючи спеціальну одиницю, звану UPP (Universal Pulse Processor). Він може також вивести інформацію про струм на кожному двигуні, який пропорційний обертальному моменту коліс.
Прикладена до двигунів напруга може регулюватися головним процесором подачею ії і відключенням із заданою частотою і протягом заданого проміжку часу. Базове перемикання частоти є постійним і досить високим, щоб не дати двигуну реагувати на одиничне перемикання. Тому двигун реагує на середній час прикладеної напруги, що може бути змінено корекцією періоду двигуна в стані ON. Це має на увазі, що змінюється тільки співвідношення між періодами станів ON і OFF, як показано на рис. 6. Величина ШІМ визначається як час, протягом якого двигун знаходиться в стані ON.
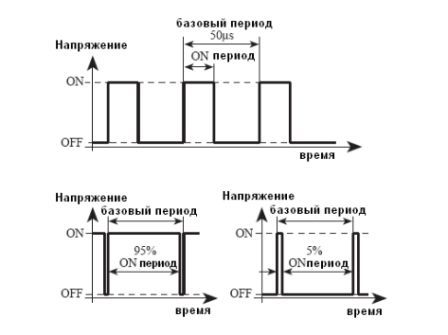
Рисунок 5 — Широтно-імпульсна модуляція живлячої напруги заснована на співвідношенні між часом стану ON і повним періодом. Базова частота перемикання є постійною
Значення ШІМ можуть встановлюватися безпосередньо або можуть управлятися власним контролером двигуна. Контролер двигуна може поліпшити управління швидкістю і положенням двигуна, встановивши необхідну величину ШІМ згідно з реальною швидкістю, зліченої з інкрементних енкодеров.
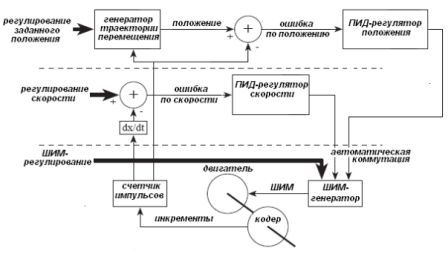
Рисунок 6 — Система керування двигуном
Обидва двигуни постійного струму можуть регулюватися ПІД-регулятором, виконаним на програмі головного процесора [9]. Кожен член регулятора (пропорційний, інтегральний, диференціальний) погоджено з постійною, встановлює вага відповідного члена: для пропорційного, для інтегрального, для диференційного.
Регулятор може бути використаний у двох режимах: регулятор швидкості і регулятор положення. Режим активного керування встановлюється згідно з типом заданого керування. Якщо регулятор отримує команду регулювання положення, режим керування автоматично перемикається у режим регулювання положення.
У режимі регулювання швидкості регулятор має в якості входу значення швидкості коліс і забезпечує підтримку цієї швидкості коліс. Зміна швидкості відбувається так швидко, як можливо, в будь — якому напрямку. Ніяких обмежень щодо прискорення в цьому режимі не передбачено. У режимі регулювання положення регулятор має в якості входу завдання на положення колеса, прискорення і максимальну швидкість. Використовуючи ці значення, регулятор прискорює колесо, поки колесо не досягне максимального значення швидкості і гальмує так, щоб досягти заданого положення. Цей рух здійснюється по трапеції. Це показано на рисунку 7.
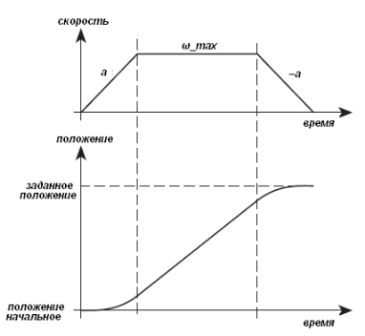
Рисунок 7 — Трапецієвидна форма швидкості з заданим прискоренням і максимальною швидкістю для досягнення заданого положення
2.6 Математичне моделювання мобільного робота Коала
Робот оснащен двомя двигунами постійного струму. Була промодельована та відлажена система керування мобильным роботом Коала в різних системах координат при подачі різних завдань.
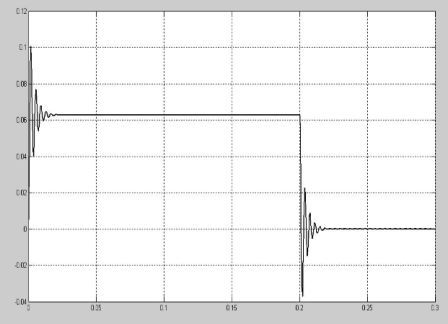
Рисунок 8 — Графік змінення струму
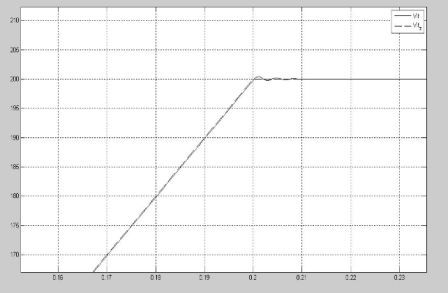
Рисунок 9 — Графік змінення швидкості з перерегулюванням

Рисунок 10 — Графік змінення положення і кута поворота вісі

Рисунок 11 — Графік перехідних процесів струмів правого та лівого колеса

Рисунок 12 — Графік перехідних процесів швидкостей правого и лівого колеса
3. Заключна частина
3.1 Висновки
В результаті виконаної роботи був досліджен алгоритм Брайтенберга [10], тобто демонстраційний режим робота, промодельована система керування мобільнмм робом, виконано її відлагодження.
3.2 Подальші дослідження
В подальшому планується дослідити інкрементні енкодери робота. Також планується приєднання давачів газу, лазерного давача відстані, давача вологості,давача температури, давача диму, давача радиації для вивчення алгоритмів руху робота з різною комплектацією давачів для різних характеристик навколишнього середовища. Планується математичний опис процесів взаємодії головних та допоміжних колес з ґрунтом різних характеристик. Також необхідно розглянути алгоритм руху робота Коала при спільній роботі з маніпулятором Катана.
Перелік посилань
-
Терехов В.А., Ефимов Д.В.,Тюкин И.Ю.,Антонов В.Н. Нейросетевые системы управления. — СПб: Издательство С.-Петербургского университета,1999. — 265 с.
Мобильный робот. [електронний ресурс]. — Режим доступу: wikipedia.org
-
Stanford Cart. [електронний ресурс]. — Режим доступу: stanford.edu
-
Shakey the robot. [електронний ресурс]. — Режим доступу: wikipedia.org
-
Irobot Сorporation. [електронний ресурс]. — Режим доступу:
irobot-ufa.ru
-
Бишоп О. Настольная книга разработчика роботов. — МК-Пресс, Корона-Век, 2010. — 400 с.
-
Книги, публикации на тему аварии на ЧАЭС и экологических последствий. [електронний ресурс]. — Режим доступу: chornobyl.in.ua
-
Инвалидная коляска. [електронний ресурс]. — Режим доступу:wikipedia.org
-
Особенности использования ПИД-регулятора в системе управления мобильного робота Коала. [електронний ресурс]. — Режим доступу: Особенности использования ПИД-регулятора в системе управления мобильного робота Коала.
-
Роботы и робототехника : статьи. [електронний ресурс]. — Режим доступу:
myrobot.ru/articles
Важливе зауваження
Під час написання даного автореферату магістерська робота ще не завершена. Остаточне завершення
Грудень 2011 Повний текст роботи та матеріали по темі можуть бути отримані у автора або його
керівника після зазначеної дати.
Наверх

 Російська
Російська Французька
Французька