
Дослідження і розробка автоматизованного тягового електропривода
шахтного
електровоза на основі застосування безколекторного
електродвигуна
Зміст
- Вступ
- 1. Шахтний локомотив як об’єкт автоматизації автоматизации
- 2. Аналіз робіт з удосконалення електропривода шахтних електровозів
- 3. Обгрунтування можливості застосування вентильних двигунів
- 3.1 Пристрій і принцип дії вентильних двигунів
- 3.2 Схемні рішення
- 3.2.1 Схема із ступінчастою зміною магнітного поля статора
- 3.2.2 Схема з плавною зміною магнітного поля статора
- 3.3 Механічні характеристики вентильного електропривода
- Висновок
- Перелік джерел
Вступ
Електропривод широко застосовується у всіх галузях народного господарства і є одним з основних споживачів і перетворювачів енергії. Техніко-економічні показники машин і установок в першу чергу залежать від ефективності їх електроприводу. Останні досягнення в галузі створення силових напівпровідникових приладів, а також розвиток цифрових інформаційних технологій відкривають широкі можливості для вирішення завдання підвищення ефективності як існуючих систем приводу, так і розроблених нових.
Локомотивний транспорт є основним засобом доставки вантажів у горизонтальних виробках вугільних шахт. Відносна простота регулювання швидкості і підтримання достатнього тягового зусилля зумовили застосування на рудничних електровозах в якості приводних – електродвигун iв постійного струму послідовного збудження (ДПТПВ). Однак тривалий досвід експлуатації виявив ряд недоліків, істотно знижующих ефективність електроприводу постійного струму шахтних електровозiв. До їх числа відносяться низькі ресурси і надійність колекторного вузла, якірних і полюсних обмоток двигунів, підвищена трудомісткість їх обслуговання. Простої локомотивів, обумовлені частими відмовами їх приводних двигунів і необхідністю проведення ремонтних і профілактічних заходів, знижують ефективність технологічного процесу транспортування гірської маси. Розглянуті обставини зумовлюють необхідність пошуку альтернативних рішень в області створення засобів регулюємого електроприводу акумуляторних і контактних електровозів, застосовуваних у вугільній промисловості. У світлі сказаного досить прийнятою представляється перспектива застосування як приводних – вентильних двигунів (ВД), що відрізняються високими показниками надійності, простотою пристрою, експлуатації, відносної дешевізни.
Все це свідчить про актуальність наукового обгрунтування спеціальної схеми силового інвертора, що відрізняється можливістю узгодження параметрів джерела живлення і приводного асинхронного двигуна.
1. Шахтний локомотив як об’єкт автоматизації
Переміщення гірської маси є одним з основних виробничих процесів гірничого підприємства. Надійна, безперебійна робота транс порту в значній мірі підвищує використання основних механізмів, сприяючи зниженню собівартості продукції.
Основним засобом доставки вантажів у горизонтальних виробках є локомотивний транспорт, який забезпечує в окремих випадках до 70 % внутрішньошахтний перевезень [1]. При цьому продуктивність і надійність роботи електровоза визначається, головним чином, станом його привода.
У порівнянні з приводами більшості гірських машин і механізмів робочий режим тягового приводу характеризується рядом відмінних особливостей, сутність яких випливає з аналізу діаграми руху електровоза (мал. 1.1) [2].
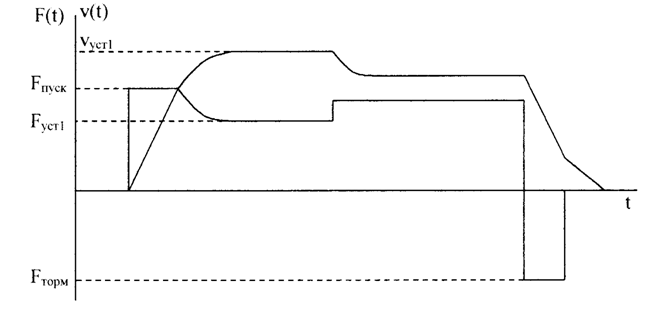
Малюнок 1.1 – Діаграма руху електровоза.
Приводу шахтного локомотива властиві часті перевантаження, мають місце в режимах пуску (Fпycк) і гальмування (Fтоpм). Змінна вага состава, непостійний коефіцієнт зчеплення і ухил шляхів також обумовлюють значне коливання сил опору руху, а, отже, і потужності, споживаної приводом. При цьому з метою обмеження її величини необхідно забезпечувати відповідне зниження частоти обертання тягового двигуна.
Таким чином, основною вимогою до тягового приводу є його стійка робота у всьому діапазоні варіювання тягових зусиль при умовi обмеження споживаної потужності величиною енергоємності акумуляторної батареї (АБ). Зазначені обставини визначають форму тягової характеристики шахтного акумуляторного електровоза (мал. 1.2). В загальному випадку вона складається з двох зон регулювання: режиму пуску й розгону поїзда, а також режиму підвищеної швидкості з ослабленим магнітним полем [3].
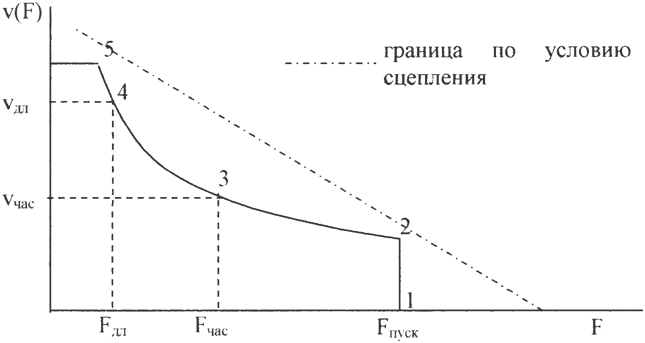
Малюнок 1.2 – Тягова діаграма електровоза.
При пуску (ділянка 1–2 на мал. 1.2) повинна забезпечуватися постійна сила тяги, значення якої визначається обмеженням по зчепленню між колісами і рейками. Тяговий двигун при пуску повинен розвивати момент, що перевищує його номінальне значення в 1,5–2 рази [3]. У міру збільшення швидкості потужність, споживана тяговим двигуном, зростає. Швидкість в кінці режиму пуску (точка 2 на мал. 1.2) визначається допустимої тривалої потужністю джерела живлення.
Друга зона регулювання (ділянка 2–5 на мал. 1.2) відповідає підвищеною швидкості руху після досягнення максимальної потужності. Дана ділянка тягової діаграми характеризується наявністю двох точок, вiдповідних основним режимам роботи приводу локомотива. Перший з них, тривалий (4), відповідає руху розвантаженого електровоза і характеризуеться підвищеною швидкістю (Vдл) при малій величині тягового зусилля (Fдл). Другий часовий (3), режим використовується при транспортуванні складу з номінальною вагою. При цьому електровоз працює на малій швидкості (Vч), розвиваючи необхіднє підвищенє тягове зусилля (Fч). За величиною споживаноi потужності тривалий і часовий режими можуть бути класифіковані, відповідно, як тривалий зі змінним навантаженням (S6) і короткочасний (S2). Таким чином, відповідно до тягової характеристики потужність, споживана приводом, не залишається постійною, а в деякій ступенi зростає зі збільшенням зусилля опору руху поїзда. Цим забезпечується максимальне використання потужності двигуна при пуску, а також у найбільш продуктивному, часовому, режимi роботи.
Завдання регулювання механічних параметрів тягового приводу найбільш просто вирішується за допомогою застосування в якості приводного ДПТПВ. Основними перевагами цієї машини в порівнянні з двигунами змiнного струму є простота реалізації процесу регулювання швидкості, можливість безпосереднього підключення до автономного джерела електроживлення (акумуляторної батареї). Крім цього електромеханічні параметри ДПТПВ найбільш повно узгоджуються з параметрами тягової характер истики електровоза (мал. 1.3). Аналітичне вираження для механічної ха рактеристики ДПТПВ визначається величиною доданої до нього навантаження (силою струму в ланцюзі якоря). У разі апроксимації кривої намагнічування Ф (I) двома лінійними ділянками, відповідними ненасиченого (I<Iгр) насиченому (I>Iгр) магнітопровода справедливо наступне співвідношення [14]:
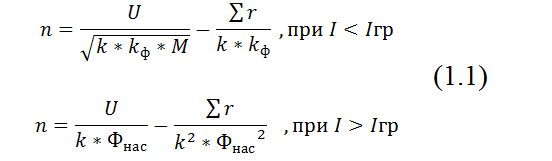
где
- U — напруга джерела живлення;
- I – струм двигуна;
- Σr – ссумарний опір ланцюга якоря;
- Фнас – магнітний потік при насиченні магнітопровода двигуна;
- k, kф – конструктивні коефіцієнти двигуна.
Як випливає із співвідношення (1.1), регулювання частоти обертання ДПТ передбачає зміну або підводиться до ДПТ напруги (імпульсне регулювання, зміна схеми з’єднання двигунів в дводвигуновому приводі), або активного опору в ланцюзі якоря (реостатне регулювання), або магнітного потоку двигуна (шунтування або секціонування обмотки збудження) [2]. Практично всі перераховані способи, за винятком імпульсного, реалізуються найпростішими засобами (комутаційна апаратура, додаткові опори і т.п.), що значно спрощує експлуатацію та обслуговування приводу.
Порівняльна оцінка динамічних властивостей різних типів машин постійного струму свідчить про кращі тягові характеристики двигунiв послідовного збудження. При однакових умовах руху і однаковому нагрузочном струмі він розвиває більший обертовий момент, ніж інші машини постійного струму, а, отже, характеризується більш високим коефіцієнтом використання потужності [14]:

При паралельній роботі двох ДПТПВ на загальну механічну систему, навантаження між ними розподіляється більш рівномірно, в той час як для ДПТ інших типів різниця навантажень внаслідок, наприклад, незначноi відмінності діаметрів коліс, може скласти 30–40 % і вище [2].
Перераховані властивості ДПТПВ, визначили широке поширення в рудничної електровозної тязі саме цих двигунів.
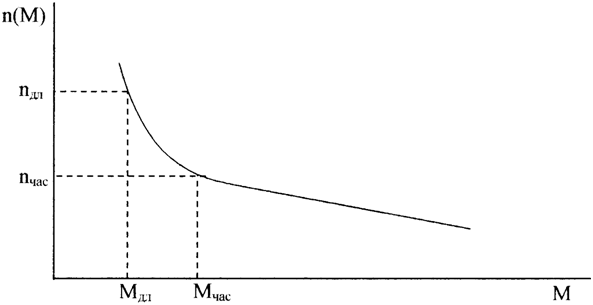
Малюнок 1.3 - Механічна характеристика ДПТПВ.
Вiдмiнною особливістю конструкції подібного двигуна в порівнянн із вентильним двигуном, є наявність в ньому колекторно-щіткового апарата й складної обмотки якоря. Для виготовлення цих вузлів витрачається значна кількість міді. У зв’язку з цим вартість ДПТПВ значно перевищує вартість ВД з аналогічними електромеханічними параметрами [4]. Складність конструкції обумовленоi відносно невисокоi надійністi тягового двигуна і підвищені вимоги до його обслуговування. Під час експлуатації ДПТ необхідно еже тижнево перевіряти стан колектора, щіток, щіткотримачів, котушок полюсів, обмотки якоря, електричних з’єднань, підшипників; видаляючи пил, бруд, подгар пластин колектора [2].
Таким чином, застосовувані в даний час системи приводу рудникових електровозів характеризуються недостатніми експлуатаційними показниками внаслідок низької надійності та малого ресурсу тягових ДПТПВ. Зазначені двигуни мають підвищену вартість і в разі виходу з ладу вимагають значних затрат праці і коштів на проведення ремонта. У зв’язку з цим є актуальною задача розробки альтернативного тягового приводу, позбавленого недоліків приводу постійного струму. Одним з можливих варіантів є застосування для цієї мети безколекторних двигунів змінного струму [5, 6].
2. Аналіз робіт по вдосконаленню електропривода шахтних електровозів
Широке застосування ДПТПВ в рудниковому тяговому приводі обумовлено простотою регулювання частоти обертання. На практиці це реалізується засобом амплітудного (реостатні системи) або імпульсного (тиристорні системи) управління напругою якірної обмотки [1, 2]. При цьому останiй спосіб є більш прийнятним. Усунення кидків струму і, отже, тягового зусилля дозволяє використовувати гранично можливу, при даному коефіцієнті зчеплення, силу тяги і здійснювати на цій підставі розгін з граничною інтенсивністю. Крім цього імпульсний регулятор має більш високий ККД (95–98 %) і надійність по рівняно з реостатною системою [7].
Один з перших акумуляторних електровозів, оснащений імпульсноїсистемою регулювання швидкості, був створений у Польщі в 1968 р. [8]. Він представляв собою чотиритонний локомотив з двома тяговими двигунами потужністю по 5,5 кВт, живлення яких здійснювалося від перетворювача за схемою мал. 1.2.
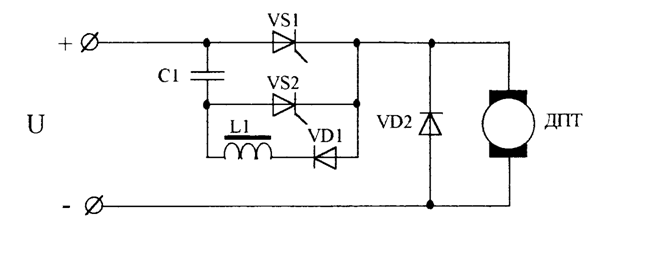
Малюнок 2.1 – Імпульсний регулятор постійної напруги
Основним недоліком приводу з перетворювачем, виконаним за даною схемою, є значна втрата потужності, обумовлена пульс уючою формою струму і наявністю в напрузі вищих гармонійних складових. Крім зниження ККД це призводить до появи вібрац ії, шуму, збільшенню іскріння на колекторі, перегріву двигуна.
У 1968 р. в Дніпропетровському інституті інженерів залізничного транспорту був розроблений імпульсний привід для промислового контактно-акумуляторного електровоза [9]. Система регулювання швидкості представляла собою два перетворювача, виконані за схемою мал. 2.1., Працюючи із зсувом по фазі на півперіоду. Її випробування показали істотне поліпшення енергетичних характеристик приводу. Аналогічні результати були отримані в Ризькiй філії ВНДІ вагонобудування для приміського електропоїзда [10], а також у ФРН – при випробуваннях промислового контактного електровоза [11]. У приводах цих локомотивів використовувалися двухтактні перетворювачі.
В даний час рудничні електровози з тиристорним управлінням знайшли широке застосування на шахтах. Прикладом може служити вітчизняний локомотив АРП-14, а також електровози Lea-BM-12/TB (акумуляторний), Lep-18/T2 (контактний), вироблені в Польщі [12].
Іншим напрямком підвищення ефективності та безпеки експлуатації підземних електровозів стало застосування безконтактного способу передачі електроенергії з тягової мережі. В результаті робіт, проведених в Дніпропетровському гірничому інституті під керівництвом д.т.н. Півняка Г.Г. [13], був створений високочастотний електровоз В14-900. Відмінною особливостю даного локомотива є використання в якості живильногоi напруги високої частоти (5 кГц), що дозволяє здійснювати передачу енергії за рахунок електромагнітної індукції між ізольованим контактним дротом і струмоприймачем, вирішуючи тим самим завдання забезпечення іскро- і вибухобезпеки. Привід електровоза В14-900 складається з двигунів постiйного струму і керованого випрямляча.
Незважаючи на поліпшені в порівнянні з реостатними системами експлуатаційнi та енергетичні характеристики імпульсним і високочастот ним системам приводу притаманний спільний недолік – наявність ненадійного і дорогого ДПТ. В цьому відношенні кращими показниками володіють двигуни змінного струму, а також вентильні двигуни.
3. Обгрунтування можливості застосування вентильних двигунiв
3.1 Пристрій і принцип дії вентильних двигунів
Вентильні двигуни (ВД) за своїм устроєм представляють поєднання синхронної машини (СМ), датчика положення ротора (ДПР), закріпленого на валу СМ, і електронного комутатора (ЕК), що виконує роль колектора машини постійного струму. Є конструкції ВД з вбудованим ЕК, у деяких ВД цей ЕК являє собою окремий блок поза машиною (так званий зовнішній ЕК). СМ, що входить до складу ВД, має 2– 3 або 4 фазних обмотки на статорі (у ВД цей статор називається якорем) і постійні магніти на роторі. Ці постійні магніти виготовляються з рідкоземельних елементів, що мають дуже велику коерцетівную силу, тобто напруженість магнітного поля.
Параметри моментних ВД (Мн, Jд, ωн) дозволяють встановлювати ці двигуни безпосередньо на вал робочої машини без редуктора.
Завдяки заміні електромагнітного збудження на збудження постійними магнітами була виключена обмотка збудження, а разом з нею і втрати на порушення, що розсіюється в двигуні, що знизило загальний нагрів двигуна і створило можливість збільшення струму, а отже і моменту двигуна при тих же його розмірах.
Цій же меті (збільшення струму і моменту) сприяло застосування в моментних ВД для обмотки статора (якоря) ізоляційних матеріалів з високою нагрiвостiйкiстю.
При установці досить потужних постійних магнітів з незначним розмагнічуванням забезпечується незалежність потоку збудження від струму якоря (статора), тобто практична відсутність реакції якоря (статора). Це дає можливість отримати 10-ти і навіть 20-ти кратні моменти двигуна при низьких швидкостях обертання, а також високу швидкодію приводу (через великий коефіцієнт динамічності)
навіть при великому власному моменті інерції двигуна. В якості магнітних матеріалів для порушення високомоментних ВД широко застосовують спікаємi металокерамічні магніти з додаванням барію та стронцію. Рідше використовуються сплавні магніти зі сплаву Алніка (Al, Ni, Co) або магніти з додаванням рідкоземельних елементів (кобальт, самарій).
3.2 Схемні рішення
Розрізняють два схемних рішення для системи живлення обмоток статора ВД [15].
3.2.1 Схема із ступінчастим зміною магнітного поля статора
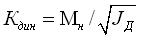
схема показана на мал. 3.1. Електронний комутатор ЕК, що забезпечує ступеневу зміну фазногоi напруги на обмотках статора синхронної машини СМ, складається з розподільника імпульсів і інвертора, зібраному на шести транзисторах Т1–Т6.
Принцип роботи ВД пояснюється на діаграмах фазних напруг, показаних на мал. 3.2.
Розгляд цих діаграм слід почати з моменту при якому ротор СМ знаходиться в положенні 0°. В цей момент включені транзистори Т1, Т3 і Т6. Обмотки А і З з’єднуються через Т1 і Т3 паралельно і підключаються до плюса джерела, а обмотка В – через Т6 підключається до мінуса джерела. При цьому 2/3 напруги джерела падається на обмотці В, а 1/3 на обмотках А і С, включених паралельно.
При повороті ротора ВД на 30° 300 ДПР подає команду через розподільник імпульсів (РІ) на перемикання транзисторів у инвертор ЕК.
Транзистори Т3 і Т6 продовжують залишатися включеними, а замість Т1 включається Т2. Обмотки В і С через Т2 і Т6 з’єднуються паралельно і приєднуються до мінуса джерела, отримуючи 1/3 його напруги. Обмотка А через Т3 підключається до полюса джерела і отримує 2/3 його напруги.
Малюнок 3.1. – Схема із ступінчастим зміною магнітного поля статора
")
Малюнок
3.2 – Діаграма напруги однієї фази, яка формується ЕК
(gif-анімація: об’ем 83,4 кБ, 8 слайдів, кількість циклів
повтореня
–
5)
Далі зміна напруги на обмотках статора відбувається при повороті ротора на кожні 60°.
3.2.2 Схема з плавною зміною магнітного поля статора
Дана схема представлена на малюнку 3.3.
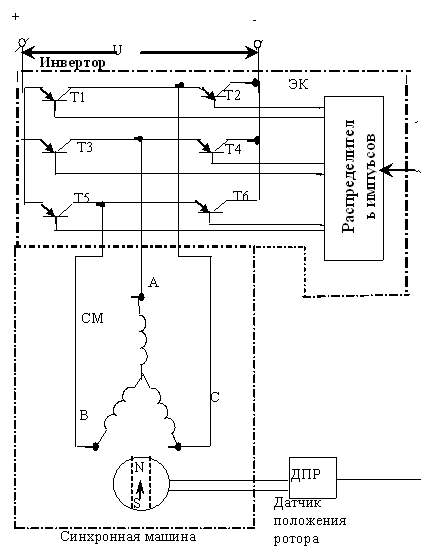
Малюнок 3.3 – Схема з плавною зміною магнітного поля статора
ППлавне і безперервна зміна магнітного поля статора ВД (магнітного поля, створюваного обмотками статора з напругами (U1 и U2) виходить завдяки використанню в якості ДПР обертового трансформатора (так званого редуктосіна). В ВД за схемою мал. 3.3 статор має дві обмотки з напругою.
Вторинні обмотки ДПР за допомогою фазочуттєві випрямлячів ФЧВ і підсилювачів постійного струму ППС (підсилювачів потужності) формують синусоїдальні напруги U1 и U2 , зсунуті на 90°. Ці напруги формують обертове магнітне поле, при наявності якого електрична машина ВД працює в синхронному режимі.
3.3 Механічні характеристики вентильного електропривода
Електромагнітний момент ВД визначається за співвідношенням:

де
- Р – електромагнітна потужність ВД;
- m1 – число фаз обмотки статора ;
- E0 – фазна е.р.с. обертання ВД;
- ω – кутова швидкість обертання ВД;
- Iq – активна складова струму статора, що збігається за фазою з Е0.
Величина Е0, в свою чергу, розраховується за формулою:

де
- f – частота мережі;
- Kобм – коефіцієнт обмотки статора;
- W – число витків фази статора;
- Ф0 – магнітний потік ротора.
Врахувавши, що швидкість обертання двигуна
де р – число пар полюсів, можна отримати, що
Підставивши значення f по (3.3) в (3.2), отримаємо такий вираз для фазної е.р.с ВД:

де
K – коефіцієнт, що залежить, від параметрів обмотки статора ВД.
Величина активної складової струму в статорі розраховується за формулою:

де
- x1 і r1 – реактивний і активний опір фази статора;
- U1 – фазна напруга обмотки статора;
- θ – кут зсуву фаз.
Для звичайних ВД (не моментних) величина θ = 30°–40° (вона визначається реальними величинами х1 и r1).
Для моментних ВД θ = 0°.
Підставивши в (3.1) значення по (3.4) і по (3.5), отримаємо
Вирішуючи (3.6) відносно, отримаємо наступне рівняння механічної характеристики ВД:

Позначимо KД = КpФ0. Тоді рівняння механічної характеристики ВД приймає вигляд:
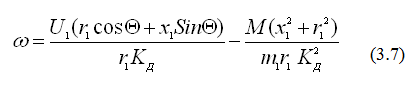
Механические характеристики ВД Механічні характеристики ВД відповідно до виразом (3.7) для різних значень фазної напруги U1 на статорі мають вигляд, показаний на мал. 3.4.
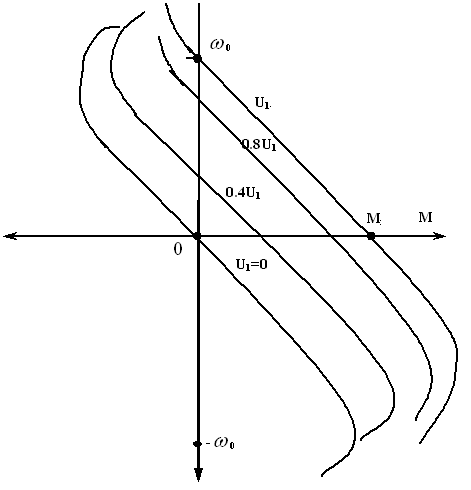
Малюнок 3.4 – Механічні характеристики ВД
В руховому режимі (I квадрант на мал. 3.4) і на робочій ділянці характеристики динамічного гальмування (при U1 = 0 )механічні характеристики ВД мають вигляд, близький до лінійного. Для ВД з низькими швидкостями обертання (так званих моментних двигунів) реактивний опір статора х1<< r2. . В цьому випадку, приймаючи x1 = 0 и θ = 0, отримаємо з (3.7):
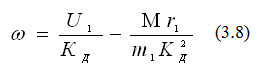
Рівняння (3.8) повністю відповідає механічної характеристиці двигуна постійного струму з незалежним збудженням. Тому ВД називають також безколекторний двигунами постійного струму. За висловом (3.6) для електромагнітного моменту ВД можна визначити значення пускового моменту його (М = Мпуск при ω = 0). В цьому випадку для машини, що стоїть


З (3.9) видно, що найбільший пусковий момент буде при і при дуже малих значеннях r1. Малі значення кута θ характерні для ВД з низькими швидкостями обертання (моментні двигуни).
В системах електроприводу з ВД і зворотним зв’язком за швидкістю можна отримати дуже великий діапазон регулювання швидкості, що досягає значення:
Висновок
Дана робота розглядає основну проблему привода при застосуванні ДПТПВ, яка полягає в дорожнечі і ненадійності таких двигунів. Так само розглянуто ряд розробок, які намагаються цю проблему вирішити. Проте вона залишається актуальною, і пропонується використання вентильних двигунів в якості приводних, як альтернатива ДПТВ, в той же час вільних від перерахованих вище недоліків.
Надалі планується розробка спеціальної схеми силового інвертора, з можливістю узгодження параметрів джерела живлення і приводного вентильного двигуна.
завершення: грудень 2011 року. Повний текст роботи та матеріали по темі можуть
бути отримані у автора або його керівника після вказаної дати.
Перелік джерел
- Синчук О.Н., Беридзе Т.М., Гузов Э.С. Системы управлениярудничным электровозным транспортом, – М.: Недра, 1993. – 255 с.
- Волотковский С.А. Рудничная электровозная тяга. – М.: Недра, 1981. – 389 с.
- Алексеев Н.И. Оптимизация систем электрической тяги в подземных выработках. – М.: Недра, 1979. – 252 с.
- Сандлер А.С., Сарбатов Р.С. Автоматическое частотное управление асинхронными двигателями. – М.: Энергия, 1974. – 328 с.
- Маренич К.Н., Ставицкий В.Н. Актуальные вопросы эксплуатации шахтных аккумуляторных электровозов. // Уголь Украины, 1999, №6. – с. 25.
- Маренич
К.Н., Ставицкий В.Н., Ешан Р.В. Применение тиристорного триггера в
качестве инвертора преобразователя частоты. / В сб.
Наука-практика
, вып. 3, – Донецк: ДонГТУ, 1998. – с. 247–249. - Крайцберг М.И., Шикуть Э.В. Импульсные методы регулирования цепей постоянного тока с помощью тиристоров. – М.: Энергия, 1969. – 88 с.
- Czapla I., Gizinsci Z., Maliszewski I. Uklad rozruchu impulsowe dla akumulatorwych lokomotijw dolowych. // Przegl electrotechn., 1969, № 10.
- Кучма К.Г., Висин Н.Г., Пашков Ф.Е. Тиристорно-импульсная система регулирования напряжения тяговых двигателей контактно-аккумуляторного электровоза постоянного тока. // Труды ДИИТа, 1968, вып. 77.
- Доценко А.П., Бирзниекс Л.В. Двухфазный тиристорный широтно-импульсный преобразователь для безреостатного регулирования скорости электроподвижного состава постоянного тока. // Труды ВНИИ вагоностроения, 1968, № 8.
- Гейнц К., Вагнер Р. Импульсное регулирование тяговых двигателей при питании от контактной сети постоянного тока. // Elektrotechn. Z., – 1966, A87, № 5.
- Dzidovski J., Hefczyc M., Szczucki F. Koncepcja zastosowania asynhronicznych silnicow klatkowych do napedov lokomotyv dolowych. // Mechanizacja i automatizacja gornictwa, № 4, 1985. – s. 5–7.
- Пивняк Г.Г. Транспорт с индуктивной передачей энергии для угольных шахт, – М.: Недра, 1990. – 245 с.
- Ильинский Н.Ф., Козаченко В.Ф. Общий курс электропривода: Учебник для вузов, – М.: Энергоатомиздат, 1992. – 544 с.
- Электромеханические свойства электроприводов с вентильными двигателями
- Управление трехфазовым вентильным электродвигателем на основе датчиков с помощью семейства AT90USB