
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Задачи исследования, планируемые результаты
- 3. Обзор исследований и разработок
- 3.1 Обзор международных источников
- 3.2 Обзор национальных и локальных источников
- 4. Определение способа регулирования производительностью многканатной шахтной подъемной установки
- Выводы
- Список источников
Введение
Шахтный подъем является наиболее важным процессом в технологической цепи добычи угля. Являясь транспортом с канатной тягой, подъем относится к дискретному виду транспорта, когда доставка груза в конкретный пункт осуществляется порциями лимитированного объема по массе [2].
Интенсивное использование шахтной подъемной установки с повышенным количеством груза в подъемном сосуде приводит к уменьшению срока службы каната и всей установки в целом, недогруз же снижает эффективность данного вида транспорта. Поэтому невозможно переоценить значение автоматизации данного объекта для горной промышленности.
1. Актуальность темы
Современные средства автоматизации позволяют повысить надежность и долговечность оборудования, увеличить производительность, уменьшить расход энергии, оптимально отрабатывать заданную диаграмму скорости без аварийных бросков тока и момента привода, разрушающе действующих на оборудование подъема, обеспечить полный контроль за всеми необходимыми параметрами, влияющими на рабочее состояние установки, и соответствующую реакцию на их изменения.
Наиболее рациональными с этой точки зрения являются многоконтурные системы с подчиненным регулированием параметров. Такие системы предусматривают разнообразные обратные связи, позволяющие отслеживать анормальные изменения контролируемых параметров и вести управление в соответствии с полученной информацией. Обратные связи предусматривают наличие устройств, преобразующие контролируемый параметр в сигнал, используемый в системе управления. Обратной связью в данном случае будет скорость и ускорение скипа, а также время цикла движения, натяжение каната и количество потребляемой электроэнергии.
В системе управления шахтной подъемной установкой вес и средняя скорость цикла, обусловливающая продолжительность рабочего цикла являются основными параметрами. Для разработки системы управления ШПУ необходимо:
- проанализировать допустимые параметры регулирования скоростных режимов шахтной подъемной установки, в соответствии с требованиями действующих Правил Безопасности [1];
- оценить способы уменьшения среднего по циклу времени движения подъемных сосудов;
- обосновать способ регулирования скоростных параметров в различных режимах работы скипового подъема;
- промоделировать и исследовать влияния изменения скоростного режима на динамические характеристики шахтного подъема;
- определить рациональные режимы работы подъема путем регулирования его скоростных параметров.
2. Задачи исследования, планируемые результаты
Целью работы является повышение эффективности процесса подъема путем разработки системы адаптивного управления производительностью шахтной подъемной установки, учитывающей среднее время по циклу и массу груза в скипе.
Основными задачами исследования являются:
- разработка математической модели шахтного подъема для различных режимов работы;
- исследование производительности, силы натяжения подъемного каната, потребляемой приводным электродвигателем мощности и других динамических характеристик в заданных режимах работы.
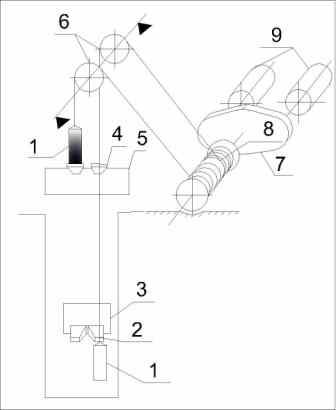
Рисунок 1 – Схема подъемной установки
1 – Скип, 2 – Шибер бункера, 3 – Загрузочный бункер, 4 – Приемный бункер, 5 – Шибер приемного бункера,
6 – Подъемные шкивы, 7 – Редуктор, 8 – Барабан подъемной машины, 9 – Двигатели привода подъемной машины
Объект исследования: шахтная подъемная установка.
Предмет исследования: методы управления производительностью многоканатной шахтной подъемной установки в различных скоростных режимах работы.
Для экспериментальной оценки полученных теоретических результатов и формирования фундамента последующих исследований, в качестве практических результатов планируется разработка аппарата управления, задания и контроля скоростных режимов многоканатной шахтной подъемной установки в составе автоматизированной системы управления технологическим процессом шахтного подъема (АСУТП). Требования к системе автоматизации прочеса подъема следующие:
- оперативное отображение текущей информации о значении мгновенных и средних скоростей движения подъемной установки;
- обеспечение надежной работы системы управления в условиях переменного грузопотока угля;
- регулирование режимов работы приводных электродвигателей подъемной установки.
3. Обзор исследований и разработок
В связи с тем, что шахтный подъем является наиболее важным связующим звеном в цепи транспортировки угля, связывающим подземную и наземную системы транспортировки горной массы, то вопросами, связанными с управлением производительностью и динамикой подъема занимаются отечественные научно-исследовательские институты (ННИГМ им. М.М. Федорова, ГАО «Донбассуглеавтоматика» и др.).
3.1 Обзор международных источников
Исследования в области шахтного подъема, а также производство систем автоматического управления ведтся крупнейшими зарубежными фирмами: ABB, AEG, «Сименс-Шуккерт» (ФРГ), «Дженерал-Электрик» (США), ASEA (Швеция), «ЧКD-Прага» (Чехословакия). Так, фирма АВВ создает системы контроля и мониторинга, обладающие свойствами [3]:
- сокращение времени цикла подъема и увеличение производительности;
- улучшенная функциональность оператора;
- улучшенная информативность по производству и техническому обслуживанию;
- расширенные средства диагностики для отслеживания ошибок.
Описаны существующие у компании
решения системы управления на базе промышленных компьютеров компании
ABB системы 800xA, адаптированные к конкретным потребностям и
требованиям грузоподъемного оборудования. Система АВВ AHM 800 Advant
монитроринга подъема –
это комплексное решение для обеспечения
безопасности и мониторинга всех типов шахтных подъемных, который
обеспечивает очень точный мониторинг параметров, как скорости,
ускорения, замедления и положения подъемного сосуда. Идея мониторинга
начала широко обсуждаться с 2001 года. Так, в статье
Research
of
Intelligent Monitor of Mine Hoist
[7]
описывалось исследование системы
мониторинга протекания процесса
шахтного подъема с реализацией программной оболочки на Visual C++.
Подобной теме посвящены источники [8–16].
Вместе с тем, данную тенденцию поддерживает и немецкая компания AEG [4], отмечая свои разработки в сфере автоматизации и электропривода.
В мировой теоретической сфере
имела место публикация о применении технических средств управления на
основе нечеткой логики, публикация Particle
Swarm and Fuzzy
Logic Based Optimal Energy Control of Induction Motor for a Mine Hoist
Load Diagram
[5]
в
IAENG International Journal of Computer Science. В
данной публикации доказывалось преимущество адаптивных систем по
сравнению с линейными для получения высокой энергоэффективности. В
статье Driving
Control System of Mine Hoist Based on SIEMENS
Frequency Convertor and PLC
[6]
были описаны недостатки традиционного способа регулирования скорости
привода подъема и предложена и исследована система управления на базе
частотного преобразователя SIEMENS MM440 и ПЛК S7-300.
Соответственно,
можно говорить об изменении тенденции применения устройств
регулирования привода электродвигателя подъема. Аналогичные концепции
можно увидеть в работах [12–16].
Таким образом, можно сделать вывод о существовании в мировой практике
тенденции в области шахтного подъема, связанной с внедрением систем
мониторинга и устройств преобразования частоты в структуру приводного
блока электродвигателя подъема.
3.2 Обзор национальных источников
Из национальных источников,
прежде всего, следует отметить портал по охране труда [17],
содержащий Новые Правила безопасности,
ограничивающие допустимую
скорость грузовых подъемных сосудов условиями проекта. На сайтах
компаний [18–21]
представлены образцы нового оборудования для шахтного подъема, в том
числе современные средства отображения информации, сигнализации и
связи. В частности, в [22]
была представлена разработанная аппаратура сигнализации и связи. В [23,
24]
представлена и обоснована система полевых шин передачи данных, что
входит в состав системы отображения и контроля информации АСУТП. В
настоящее время также разрабатываются реконструкционные меры по
повышению производительности шахтного подъема («ГПИ
Кривбасс-проект
,
Кривой Рог, НПФ
«Мидиэл», Донецк), которые были опубдикованы в [25].
Задачей разработки
программно-аппаратного комплекса
управления и защиты шахтных подъемных
машин занимается институт УКРНИИВЭ [26].
Тема регулирования и учета производтельности относительно нова и
описана в [27,
28]
В связи с переходом на новые виды
регулирования электропривода
шахтной
подъемной установки, опубликована работа по расчету мощности
шахтной
подъемной установки с приводом АФ-РА [29].
Вопросам привода посвящены книги
Дацковского Л.Х., Рогового
В.И.,
Бирюкова А.В., Шухера В.И., Католикова В.Е., Динкеля А.Д. и других [30–40].
Опубликованы также статьи по динамике шахтного подъема профессором
В.И. Дворниковым, К.А. Соломенцевым,
А.Н. Чехлатым [41–46]
(НИИГМ
имени М.М. Федорова).
4. Определение способа регулирования производительностью многканатной шахтной подъемной установки
Современные средства автоматизации позволяют увеличить производительность установки, оптимизировать диаграмму скорости, а также уменьшить величину среднего расхода электрической энергии за цикл движения подъемного сосуда за счет точности воспроизведения заданных параметров. Вместе с тем, данные решения не предусматривают управления производительностью подъемной установки с учетом суточного изменения требований по расходу электроэнергии, натяжению подъемного каната, а также в зависимости от величины среднего грузопотока на загрузочной площадке.
Так как, согласно Правилам Безопасности [1], допустимая скорость для клетьевых подъемов ограничена 12 м/с, а для скиповых – определяется проектними показателями целесообразности внедрения оперативного управления параметрами подъемной установки на протяжении суток.
Суточная производительность подъемной установки определяется из выражения [2]:
 ,
,где Ac – суточная производительность подъемной установки, т;
Qп – грузоподъемность подъемного сосуда, т;
Tc – продолжительность работы шахтной подъемной установки, с;
Tц – длительность цикла подъемной операции с учетом времени загрузки и разгрузки подъемного сосуда, с;
Tп – время технологической паузы, с.
Анализ данного выражения показывает, что производительность подъемной установки зависит от изменения времени цикла установки:
 ,
,
где Н – глубина ведения горных работ, м;
vc – средняя скорость движения подъемного сосуда за цикл, м/с.
Среднее значение потребляемой активной мощности на валу приводного двигателя определяется из выражения:
 ,
,где vр – скорость равномерного движения подъемной установки, м/с;
η – общий коэффициент полезного действия шахтного подъема;
Fi – динамические силы, действующие на подъемный сосуд на заданных интервалах диаграммы скоростей, кН;
t3, t5 – продолжительность периодов ускорения и замедления соответственно, с (рисунок 2).
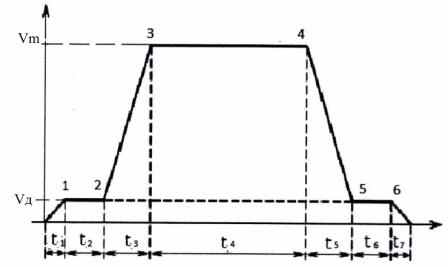
Рисунок 2 – Тахограмма движения сосудов подъемной установки
Для обеспечения безопасной эксплуатации подъема необходим контроль максимальной силы натяжения подъемного каната:
 ,
,где
Fн – максимальная сила натяжения подъемного каната, кН;
mпр – приведенная к оси подъемной машины масса подъемной установки кг;
a1 – ускорение основного хода движения подъемного сосуда, м/с2.
С использованием данных формул получена сопоставительная таблица, отражающая влияние изменения параметров средней скорости и суточной производительности подъема, а также значений потребляемой приводным электродвигателем мощности в зависимости от параметров скоростного режима (таблица 1).
Рисунок
2 – Схема работы подъемной установки
(анимация: 15 кадров, 6 циклов повторения, 47,6 килобайт)
Таблица 1 – Зависимости исследуемых величин при режимах скоростей
|
Режим
1 – Изменение
скорости равномерного движения
(a1,
a2=0,8)
|
||||||||
| vр |
8,5 | 9 | 9,5 | 10 | 10,5 | 11 | 11,5 | 12 |
| vcр |
7,16 | 7,49 | 7,8 | 8,1 | 8,39 | 8,67 | 8,93 | 9,19 |
| Ac |
4830 | 5040 | 5250 | 5460 | 5640 | 5850 | 6030 | 6180 |
| P |
637,44 | 641,23 | 645,24 | 649,46 | 653,89 | 658,51 | 663,33 | 668,34 |
| Fн |
487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 |
| Режим 2 – Изменение ускорения a1 и замедления a2 (vp= 10) | ||||||||
| a1, a2 | 0,6 | 0,7 | 0,8 | 0,9 | 1 | 1,1 | 1,2 | 1,3 |
| vcp |
7,89 | 8,01 | 8,1 | 8,17 | 8,23 | 8,28 | 8,32 | 8,35 |
| Ac |
5310 | 5400 | 5460 | 5520 | 5550 | 5580 | 5610 | 5640 |
| P |
636,3 | 640,5 | 645,2 | 650,5 | 656,3 | 662,6 | 669,5 | 676,8 |
| Fн |
449,6 | 468,7 | 487,8 | 506,9 | 526 | 545,1 | 564,2 | 583,3 |
| Режим 3 – Изменение замедления a2 (vp=10, a1=0,8) | ||||||||
| a2 | 0,6 | 0,7 | 0,8 | 0,9 | 1 | 1,1 | 1,2 | 1,3 |
| vcp |
7,16 | 7,49 | 7,8 | 8,1 | 8,39 | 8,67 | 8,93 | 9,19 |
| Ac |
5400 | 5430 | 5460 | 5490 | 5490 | 5520 | 5520 | 5460 |
| P |
632,9 | 641,4 | 649,5 | 657,2 | 664,7 | 672,2 | 679,6 | 690,2 |
| Fн |
487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 |
Анализ таблицы 1 показывает, что в режиме 2 при изменении ускорения движения скипа линейно увеличивается динамическая сила натяжения и существенно возрастает значение потребляемой электрической мощности, а в режимах 1 и 3 сила натяжения каната остается постоянной.
При исследовании зависимости потребляемой суточной электрической мощности от производительности подъема для каждого скоростного режима (рисунок 1) установлено, что для стабилизации усилия натяжения на канат целесообразным являются применение режимов 1 и 2, и вместе с тем, наибольшая экономия электроэнергии достигается в режимах 3 и 1.
Выводы
Таким образом, наиболее рациональным режимом работы шахтного подъема с точки зрения обеспечения заданной производительности является режим изменения скорости равномерного движения подъемного сосуда, что не противоречит требованиям действующих Правил Безопасности [1]. Вместе с тем, разработка средств и систем автоматического управления режимами работы тормозной системы позволит повысить эффективность работы подъема.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2012 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- НПАОП 10.0–1.01–10 Правила Безпеки у вугільних шахтах.
- Бежок
В.Р. Шахтный подъем:
[научно-производственное издание] под общ. ред.
Б.А. Грядущиего,
В.А. Корсуна. / В.Р. Бежок –
Донецк: ООО
Юго-Восток, Лтд
, 2007. – 624 с. - ABB AB – Mine Hoist Systems [Электронный ресурс]. – Режим доступа: http://www.mining-technology.com/contractors/.
- Welcome to AEG Industrial Engineering [Электронный ресурс]. – Режим доступа: http://aeg-ie.com/.
- Thanga Raj C., Srivastava C., Agarwal P. Particle Swarm and Fuzzy Logic Based Optimal Energy Control of Induction Motor for a Mine Hoist Load Diagram. / C. Thanga Raj, C. Srivastava, P. Agarwal [Электронный ресурс]. – Режим доступа: http://www.iaeng.org/IJCS/.
- Shuang S., Jun-xia C. Driving Control System of Mine Hoist Based on SIEMENS Frequency Convertor and PLC. / S. Shuang, C. Jun-xia [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Jiang Laidong M.J. Research of Intelligent Monitor of Mine Hoist. / M.J. Jiang Laidong [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Yu-nan Z., Yu-ping Z. Design and Research of Mine Hoister Synthetic Monitoring System. / Z. Yu-nan, Z. Yu-ping [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Lun-wu X. The Monitoring System of the Winder Based on LabVIEW. / X. Lun-wu [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- LuLu W. Development of the Intelligent Instrument for Monitoring the Clearance between the Brake-Shoe of ZXC-1 Hoist. / W. LuLu [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Jun Y., Jingtao W., Jinxian C. Monitoring System of Hoister Based on Virtual Instrument. / Y. Jun, W. Jingtao, C. Jinxian [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Xuewen Z. Total Digital Controlling System For Mine Elevator. / Z. Xuewen [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Jie S. STD micro-computer monitoring system for mine hoist. / S. Jie [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Yu-Lin L. Design of Novel Control System of Mine Hoist. / L. Yu-Lin. Coal Mine Machinery; 2009–03 [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Yu-feng Z., De-yang Y. Reformed Design of Mine Winch Electric Control System Based on PLC Variable-frequency. / Z. Yu-feng, Y. De-yang [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Douzhang D., Bin P. Technical Design of a Series Gantry Planer Main Driving System Based on Siemens M4 Controller. / D. Douzhang, P. Bin [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Портал
Охрана труда
. [Электронный ресурс]. – Режим доступа: http://www.ohranatruda.in.ua/pages/. - ООО
Укрэлектросервис
. [Электронный ресурс]. – Режим доступа: http://www.ukrelektroservis.com.ua/production. - НПК
Горные машины
. [Электронный ресурс]. – Режим доступа: http://www.mmc.kiev.ua/production/. - ПО
Укрспецкомплект
. [Электронный ресурс]. – Режим доступа: href="http://ukrsk.com.ua/pult_shahtn_pod. Интергормаш
. [Электронный ресурс]. – Режим доступа: http://igm.com.ua/index.- Дубинский А.А., Сорокин Н.Н. Стволовая сигнализация шахтных подъемных машин с применением искробезопасной шины передачи данных. / А.А. Дубинский, Н.Н. Сорокин [Электронный ресурс]. – Режим доступа: http://deg-automatica.dn.ua/pdf/.
- Дубинский А.А.
Структура искробезопасных полевых шин управления и передачи
данных. / А.А. Дубинский, А.А. Дубинский,
В.Д. Власов //
Взрывозащищенное
электрооборудование: сб. науч. тр. УкрНИИВЭ. – Донецк: ООО
Юго-Восток, Лтд
, 2008. С. 221–225. - Жданкин В. Применение fieldbus-систем во взрывоопасных зонах / В. Жданкин // Современные технологии автоматизации. 2006. Выпуск 4. С. 76–80.
- Криворізький національний університет. [Электронный ресурс]. – Режим доступа: http://ktu.edu.ua/Files/.
- УКРНИИВЭ. [Электронный ресурс]. – Режим доступа: http://ukrniive.com.ua/article/.
- Задума
С.В. Анализ способов управления производительностью скиповой подъемной
установки / С.В. Задума, Б.В. Гавриленко //
Донбас–2020: перспективи розвитку очима молодих вчених
: Cб. наукових праць. V науково-технічної конференції аспирантів та студентів у м. Донецку 24–26 квітня 2012 г. – Донецьк, ДонНТУ, 2012. - Задума С.В. Аппаратура учета производительности шахтной подъемной установки / С.В. Задума, Б.В. Гавриленко // «Автоматизация технологических объектов и процессов. Поиск молодых»: Cб. научных трудов. XI научно-технической конференции аспирантов и студентов в г. Донецке 17–20 мая 2011 г. – Донецк, ДонНТУ, 2011. – 306 с.
- Разумный Ю.Т., Мазур С.Н. – Определение расчетной мощности шахтной подъемной установки с приводом АФ-РА. / Ю.Т. Разумный, С.Н. Мазур. // Гірнича електромеханіка та автоматика – 2004. Випуск 72. С. 34–39.
- Дацковский Л.Х.,
Роговой В.И. Электропривод
шахтных стационарных установок.
Современное состояние и перспективы. / Л.Х. Дацковский,
В.И. Роговой – В кн.:
Міжвідомчий науково-технічний збірник
. Випуск 66.Електромашинобудування та електрообладнання
. – Київ: Техника, 2006. С. 94–102. - Бирюков А.В., Шухер В.И., Католиков В.Е. и др. Автоматизированный тиристорный электропривод постоянного тока для шахтных подъемных машин. / А.В. Бирюков, В.И. Шухер, В.Е. Католиков // Автоматизированный электропривод. Сб. научных трудов. – Москва, 2002. С. 71–89.
- Дацковский Л.Х., Бирюков А.В., Кузнецов И.С. и др. Безредукторный частотнорегулируемый синхронный электропривод производственных механизмов. / Л.Х. Дацковский, А.В. Бирюков, И.С. Кузнецов // Автоматизированный электропривод: Сборник научн. трудов.– Москва, 2002. С. 43–70.
- Дацковский Л.Х., Бирюков А.В. и др. Частотнорегулируемый синхронный электропривод мощностью 5000 кВт вентиляторной установки // Проблемы автоматизированного электропривода. Теория и практика. – Харьков: Основа, 1997. С. 190, 191.
- Кочетков В.Д., Дацковский Л.Х., Бирюков А.В. и др. Системы регулирования электроприводов переменного тока с микропроцессорным управлением. / Л.Х. Дацковский, А.В. Бирюков // Электротехническая промышленность. Сер. 08. Электропривод: Обзор, информ. – 1989. Вып. 26. С. 1–80.
- Серия тиристорных преобразовательных агрегатов АТ и АТР мощностью до 5000 кВт для автоматизированных электроприводов постоянного тока. Отраслевой каталог 05.03.29. – 74. – М.: Информэлектро, 1974.
- Серия тиристорных преобразовательных агрегатов ТПЗ и ТПРЗ мощностью 1000–12000 кВт на тиристорах Т-320. Отраслевой каталог 05.03.14229–74. М.: Информэлектро, 1976.
- Электроприводы комплектные тиристорные постоянного тока мощностью 530–2000 кВт для шахтных подъемных машин. Отраслевой каталог 08.50.02–76. – М.: Информэлектро, 1976.
- Динкель А.Д., Католиков В.Е., Седунин А.М. Синтез САУ тиристорным приводом рудничного подъема с учетом зоны прерывистых токов. / А.Д. Динкель, В.Е. Католиков, А.М. Седунин // Электротехническая промышленность. Электропривод. – 1980. Вып. 7(87). С. 7–10.
- Динкель А.Д., Католиков В.Е., Седунин А.М. Синтез САУ тиристорным приводом рудничного подъема с учетом зоны прерывистых токов. / А.Д. Динкель, В.Е. Католиков, А.М. Седунин // Электротехническая промышленность. Электропривод. – 1981. Вып. 2(91). С. 20–23.
- Решмин Б.И., Ямпольский Д.С. Проектирование и наладка систем подчиненного регулирования электроприводов. / Б.И. Решмин, Д.С. Ямпольский – М: Энергия, 1975. – 184 с.
- Соловьев В.С. Стационарные машины и установки. Шахтные подъемные установки. / В.С. Соловьев [Электронный ресурс]. – Режим доступа: http://www.twirpx.com/file/.
- Персональный сайт Степанова Анатолия Григорьевича, Заслуженного деятеля науки Российской Федерации, доктора технических наук, профессора. [Электронный ресурс]. – Режим доступа: http://agstepanov2009.narod.ru/.
-
Голубенцев А.Н. Исследование динамики рудничного подъема. Автореферат. г. Сталино. / А.Н. Голубенцев [Электронный ресурс]. – Режим доступа: http://www.uran.donetsk.ua/~masters.
- Дворников В.И.,
Соломенцев К.А. Математическая модель динамики подъемных машин
с
бегущими витками трения. / В.И. Дворников,
К.А. Соломенцев // Сб. научн.
трудов НИИГМ имени М.М. Федорова
Проблеми експлуатації обладнання шахтних стаціонарних установок
. – Вип. 96, –Донецк, НИИГМ имени М.М.Федорова, 2003. С. 92–102. - Дворников В.И.,
Трибухин В.А. Математическая модель динамики подъемных
установки
в режимах предохранительного торможения. / В.И. Дворников,
В.А. Трибухин // Сб. научн. трудов НИИГМ
имени М.М. Федорова
Проблеми експлуатації оладнання шахтних стаціонарних установок
. Вип. 95, – Донецк, НИИГМ имени М.М.Федорова, 2002. С. 96–138. - Дворников В.И., Чехлатый А.Н. Переходные состояния подъемной установки при посадке и снятии с оснований сосудов. / В.И. Дворников, А.Н. Чехлатый // Уголь Украины, 1982. Вып. 4. С. 24–26.