
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Огляд досліджень та розробок
- 3.1 Огляд міжнародних джерел
- 3.2 Огляд національних та локальних джерел
- 4. Визначення способу регулювання продуктивністю багатоканатної шахтної підйомной установки
- Висновки
- Перелік посилань
Вступ
Шахтний підйом є найбільш важливим процесом у технологічному ланцюгу видобутку вугілля. Підйом відноситься до дискретного виду транспорту, коли доставка вантажу в конкретний пункт здійснюється порціями лімітованого об’єму по масі [2]. Інтенсивне використання шахтної підйомної установки з підвищеною кількістю вантажу у підйомній судині призводить до зменшення терміну служби каната і всієї установки в цілому, недовантаження ж знижує ефективність даного виду транспорту. Тому неможливо переоцінити значення автоматизації даного об’єкта для гірничої промисловості.
1. Актуальність теми
Сучасні засоби автоматизації дозволяють підвищити надійність і довговічність обладнання, збільшити продуктивність, зменшити витрату енергії, оптимально відпрацьовувати задану діаграму швидкості без аварійних поштовхів струму і моменту приводу, що руйнівно діють на обладнання підйому, та забезпечити повний контроль за основними необхідними параметрами, що впливають на робочий стан установки, і відповідну реакцію на їх зміни.
Найбільш раціональними з цієї точки зору є багатоконтурні системи з підлеглим регулюванням параметрів. Такі системи передбачають різноманітні зворотні зв’язки, що дозволяють відслідковувати анормальні зміни контрольованих параметрів і вести управління відповідно до отриманої інформації. Зворотні зв’язки передбачають наявність пристроїв, що перетворюють контрольований параметр у сигнал, який використовується в системі управління. Зворотним зв’язком в даному випадку буде швидкість і прискорення скіпа, а також час циклу руху, натяг каната й кількість споживаної електроенергії. У системі управління шахтною підйомною установкою вага і середня швидкість циклу є основними параметрами. Для розробки системи управління ШПУ необхідно:
- проаналізувати допустимі параметри регулювання швидкісних режимів шахтної підйомної установки, відповідно до вимог діючих Правил Безпеки [1];
- оцінити способи зменшення середнього по циклу часу руху підйомних судин;
- обгрунтувати спосіб регулювання швидкісних параметрів в різних режимах роботи скіпового підйому;
- промоделювати і досліджувати вплив зміни швидкісного режиму на динамічні характеристики шахтного підйому;
- визначити раціональні режими роботи підйому шляхом регулювання його швидкісних параметрів.
2. Мета і задачі дослідження та заплановані результати
Метою даної роботи є підвищення ефективності процесу підйому шляхом розробки системи адаптивного управління продуктивністю шахтної підйомної установки, яка враховує середній час по циклу і масу вантажу в скіпа. Основними задачами дослідження виступають:
- розробка математичної моделі шахтного підйому для різних режимів роботи;
- дослідження продуктивності, сили натягу підйомного каната, споживаної приводним електродвигуном потужності та інших динамічних характеристик в заданих режимах роботи.
Об’єктом дослідження є шахтна підйомна установка. Предметом дослідження виступають методи управління продуктивністю багатоканатної шахтної підйомної установки в різних швидкісних режимах роботи. Для експериментальної оцінки отриманих теоретичних результатів і формування фундаменту наступних досліджень, в якості практичних результатів планується розробка апарату управління, завдання та контролю швидкісних режимів багатоканатної шахтної підйомної установки в складі автоматизованої системи управління технологічним процесом шахтного підйому (АСУТП). Вимоги до системи автоматизації підйому наступні:
- оперативне відображення поточної інформації про значення миттєвих і середніх швидкостей руху підйомної установки;
- забезпечення надійної роботи системи управління в умовах змінного вантажопотоку вугілля;
- регулювання режимів роботи приводних електродвигунів підйомної установки.
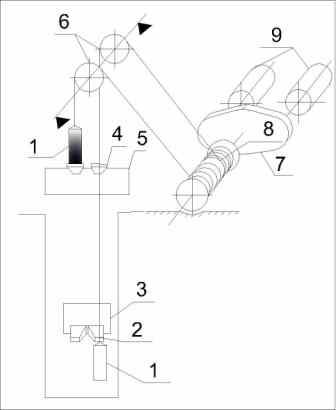
Рисунок 1 – Схема підйомної установки
1 – Скіп, 2 – Шибер бункера, 3 – Завантажувальний бункер, 4 – Прийомний бункер, 5 – Шибер прийомного бункера,
6 – Підйомні шківи, 7 – Редуктор, 8 – Барабан підйомної машини, 9 – Двигуни приводу підйомної машини
Об’єкт дослідження: шахтна підйомна установка.
Предмет дослідження: методи управління продуктивністю підйомної судини у різних швидкісних режимах.
3.Огляд досліджень і розробок
У зв’язку з тим, що шахтний підйом є найбільш важливою
сполучною ланкою
в ланцюзі транспортування вугілля, що зв’язує підземну і
наземну
системи транспортування гірничої маси, питаннями, пов’язаними
з
управлінням продуктивністю і динамікою підйому займаються вітчизняні
науково-дослідні інститути (НДІГМ ім. М.М. Федорова, ДАТ Донбасвуглеавтоматика
тощо).
3.1 Огляд міжнародних джерел
Дослідження в області шахтного підйому, а також виробництво систем
автоматичного управління здійснюється найбільшими зарубіжними фірмами:
ABB, AEG, Сіменс-Шуккерт
(ФРН), Дженерал-Електрик
(США), ASEA (Швеція), ЧКД-Прага
(Чехословаччина). Так, фірма АВВ
створює системи контролю та моніторингу, що мають властивості
[3]:
- скорочений часу циклу підйому і збільшення продуктивності;
- поліпшена функціональність оператора;
- поліпшена інформативність з виробництва та технічного обслуговування;
- розширені засоби діагностики для відстеження помилок.
Описано існуючі у компанії
рішення системи управління на базі
промислових комп’ютерів
компанії ABB системи 800xA, адаптований до
конкретних потреб і вимог вантажопідйомного обладнання. Система АВВ AHM
800 Advant монітрорінга підйому – це комплексне рішення для
забезпечення безпеки та моніторингу всіх типів шахтних підйомних, який
забезпечує дуже точний моніторинг параметрів, як швидкості,
прискорення, уповільнення і положення підйомної посудини. Ідея
моніторингу почала широко обговорюватися з 2001 року. Так, у статті
Research of Intelligent Monitor of Mine
Hoist [7]
описувалося
дослідження системи моніторингу перебігу процесу шахтного підйому з
реалізацією програмної оболонки на Visual C++. Подібної темі
присвячені джерела [8–16].
Разом з тим, дану тенденцію підтримує і німецька компанія AEG [4],
відзначаючи свої розробки в сфері автоматизації та електроприводу.
У світовій теоретичній сфері мала місце публікація про застосування
технічних засобів управління на основі нечіткої логіки,
публікація Particle
Swarm and Fuzzy Logic
Based Optimal Energy Control
of Induction Motor for a Mine Hoist Load
Diagram
[5]
у журналі IAENG
International Journal of Computer Science. У
даній публікації доводилося перевага адаптивних систем в порівнянні з
лінійними для отримання високої енергоефективності. У
статті Driving
Control System of Mine Hoist Based on SIEMENS
Frequency Convertor and PLC
[6]
були описані недоліки традиційного
способу регулювання швидкості приводу підйому і запропонована і
досліджена система управління на базі частотного перетворювача SIEMENS
MM440 і ПЛК S7-300. Відповідно, можна говорити про зміну
тенденції
застосування пристроїв регулювання приводу електродвигуна підйому.
Аналогічні концепції можна побачити в роботах [12–16].
Таким чином,
можна зробити висновок про існування в світовій практиці тенденції в
області шахтного підйому, пов’язаної
з впровадженням систем моніторингу
та пристроїв перетворення частоти в структуру приводного блоку
електродвигуна підйому.
3.2 Огляд національних та локальних джерел
З національних джерел, перш за
все, слід відзначити портал з охорони праці [17],
що містить нові
Правила Безпеки, що обмежують допустиму швидкість вантажних підйомних
судин умовами проекту. На сайтах компаній [18–21]
представлені
приклади нового обладнання для шахтного підйому, в тому числі сучасні
засоби
відображення інформації, сигналізації та зв’язку. Зокрема, в [22]
була представлена розроблена апаратура сигналізації та
зв’язку. В [23,
24]
представлена і обгрунтована система польових шин передачі даних, що
входить до складу системи відображення і контролю інформації АСУТП. В
даний час також розробляються реконструкційні заходи щодо підвищення
продуктивності шахтного підйому (ДПІ Кривбас-проект
,
Кривий Ріг, НПФ Мідіел
,
Донецьк), які були опубліковані в [25].
Завданням розробки
програмно-апаратного
комплексу управління та захисту шахтних підйомних машин займається
інститут УкрНДІВЕ [26].
Тема регулювання та
обліку продуктивності відносно нова та описана у [27,
28]
У зв’язку з переходом на нові види регулювання електроприводу
шахтної
підйомної установки, опублікована робота з розрахунку потужності
шахтної підйомної установки з приводом АФ-РА
[29]
Питанням приводу посвячені книги Дацковского Л.Х., Рогового В.І.,
Бірюкова О.В. , Шухер В.І., Католікова В.Є., Дінкеля А.Д. та інших [30–40].
Опубліковані також статті з динаміки
шахтного підйому В.І. Дворніковим,
К.А. Соломенцевим, А.Н. Чехлатим [41–46]
(НДІГМ імені М.М. Федорова).
4. Визначення способу регулювання продуктивністю многканатной шахтної підйомної установки
Сучасні засоби автоматизації дозволяють збільшити продуктивність установки, оптимізувати діаграму швидкості, а також зменшити величину середньої витрати електричної енергії за цикл руху підйомної посудини за рахунок точності відтворення заданих параметрів. Разом з тим, дані рішення не передбачають управління продуктивністю підйомної установки з урахуванням добової зміни вимог щодо витрати електроенергії, натягу підйомного каната, а також величини середнього вантажопотоку на завантажувальному майданчику
Так як, згідно з Правилами Безпеки [1], допустима швидкість для клітьових підйомів обмежена 12 м/с, а для скіпових – визначається проектними показниками доцільності впровадження оперативного управління параметрами підйомної установки протягом доби. Добова продуктивність підйомної установки визначається з виразу [2]:
 ,
,
Ac – добова продуктивність;
Qп – Вантажопідйомність підйомної судини;
Tc – Час зміни;
Tп –Час технологічної паузи.
Аналіз виразу (1) показує, що продуктивність підйомної установки залежить від зміни часу циклу установки:
 ,
,де Tц – час циклу, с;
Н – глибина ведення гірничих робіт, м;
vср – середня швидкість руху підйомної посудини за цикл, м/с.
Середнє значення споживаної активної потужності на валу приводного двигуна визначається з виразу:
 ,
,де P – Середнє значення споживаної активної потужності на валу приводного двигуна;
vp – швидкість рівномірного руху підйомної установки;
η – загальний коефіцієнт корисної дії шахтного підйому;
t3, t5 – тривалість прискорення та уповільнення
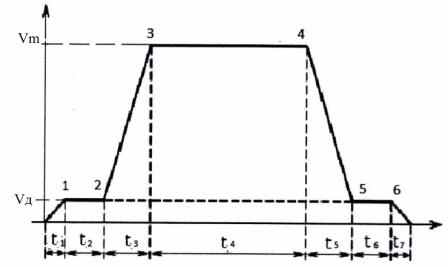
Рисунок 2 – Тахограма руху судин підйомної установки
Для забезпечення безпечної експлуатації підйому необхідний контроль максимальної сили натягу підйомного каната:

де Fн – максимальна сила натягу підйомного каната, кН;
mпр – приведена до осі підйомної машини маса підйомної установки;
a1 – прискорення основного ходу руху підйомної судини.
Рисунок
2 – Схема роботи підйомної установки
(анімація: 17 кадрів, 5 циклів повторення, 45 кілобайт)
З використанням вищеназваних залежностей отримана зіставна таблиця, що відображає вплив зміни параметрів середньої швидкості та добової продуктивності підйому, а також значень споживаної приводним електродвигуном потужності в залежності від параметрів швидкісного режиму (таблиця 1).
Таблиця 1 – Залежності досліджуваних параметрів при різних режимах швидкостей
|
Режим
1
– Зміна швидкості рівномірного
руху
(a1,
a2=0,8)
|
||||||||
| vр |
8,5 | 9 | 9,5 | 10 | 10,5 | 11 | 11,5 | 12 |
| vcр |
7,16 | 7,49 | 7,8 | 8,1 | 8,39 | 8,67 | 8,93 | 9,19 |
| Ac |
4830 | 5040 | 5250 | 5460 | 5640 | 5850 | 6030 | 6180 |
| P |
637,44 | 641,23 | 645,24 | 649,46 | 653,89 | 658,51 | 663,33 | 668,34 |
| Fн |
487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 |
| Режим
2
– Зміна
прискорения a1
и уповільнення a2
(vp=
10) |
||||||||
| a1, a2 | 0,6 | 0,7 | 0,8 | 0,9 | 1 | 1,1 | 1,2 | 1,3 |
| vcp |
7,89 | 8,01 | 8,1 | 8,17 | 8,23 | 8,28 | 8,32 | 8,35 |
| Ac |
5310 | 5400 | 5460 | 5520 | 5550 | 5580 | 5610 | 5640 |
| P |
636,3 | 640,5 | 645,2 | 650,5 | 656,3 | 662,6 | 669,5 | 676,8 |
| Fн |
449,6 | 468,7 | 487,8 | 506,9 | 526 | 545,1 | 564,2 | 583,3 |
| Режим 3 – Зміна уповільнення a2 (vp=10, a1=0,8) | ||||||||
| a2 | 0,6 | 0,7 | 0,8 | 0,9 | 1 | 1,1 | 1,2 | 1,3 |
| vcp |
7,16 | 7,49 | 7,8 | 8,1 | 8,39 | 8,67 | 8,93 | 9,19 |
| Ac |
5400 | 5430 | 5460 | 5490 | 5490 | 5520 | 5520 | 5460 |
| P |
632,9 | 641,4 | 649,5 | 657,2 | 664,7 | 672,2 | 679,6 | 690,2 |
| Fн |
487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 | 487,8 |
Аналіз
таблиці 1 показує, що в режимі 2 при зміні прискорення руху скіпа
лінійно збільшується динамічна сила натягу й істотно зростає значення
споживаної електричної потужності, а в режимах 1 і 3 сила натягу каната
залишається постійною.
При дослідженні залежності споживаної добової електричної потужності
від продуктивності підйому для кожного швидкісного режиму (рисунок 1)
встановлено, що для стабілізації зусилля натягу на канат доцільним є
застосування режимів 1 і 2, і разом з тим, найбільша економія
електроенергії досягається в режимах 3 і 1.
Висновки
Таким чином, найбільш раціональним режимом роботи шахтного підйому з точки зору забезпечення заданої продуктивності є режим зміни швидкості рівномірного руху підйомної посудини, що не суперечить вимогам діючих Правил безпеки [1]. Разом з тим, розробка засобів і систем автоматичного управління режимами роботи гальмівної системи дозволить підвищити ефективність роботи підйому.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2012 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після вказаної дати.
Перелік посилань
- НПАОП 10.0–1.01–10 Правила Безпеки у вугільних шахтах.
- Бежок
В.Р. Шахтный подъем:
[научно-производственное издание] под общ. ред.
Б.А. Грядущиего,
В.А. Корсуна. / В.Р. Бежок –
Донецк: ООО
Юго-Восток, Лтд
, 2007. – 624 с. - ABB AB – Mine Hoist Systems. [Электронный ресурс]. – Режим доступа: http://www.mining-technology.com/contractors/.
- Welcome to AEG Industrial Engineering. [Электронный ресурс]. – Режим доступа: http://aeg-ie.com/.
- Thanga Raj C., Srivastava C., Agarwal P. Particle Swarm and Fuzzy Logic Based Optimal Energy Control of Induction Motor for a Mine Hoist Load Diagram. / C. Thanga Raj, C. Srivastava, P. Agarwal [Электронный ресурс]. – Режим доступа: http://www.iaeng.org/IJCS/.
- Shuang S., Jun-xia C. Driving Control System of Mine Hoist Based on SIEMENS Frequency Convertor and PLC. / S. Shuang, C. Jun-xia [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Jiang Laidong M.J. Research of Intelligent Monitor of Mine Hoist. / M.J. Jiang Laidong [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Yu-nan Z., Yu-ping Z. Design and Research of Mine Hoister Synthetic Monitoring System. / Z. Yu-nan, Z. Yu-ping [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Lun-wu X. The Monitoring System of the Winder Based on LabVIEW. / X. Lun-wu [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- LuLu W. Development of the Intelligent Instrument for Monitoring the Clearance between the Brake-Shoe of ZXC-1 Hoist. / W. LuLu [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/
- Jun Y., Jingtao W., Jinxian C. Monitoring System of Hoister Based on Virtual Instrument. / Y. Jun, W. Jingtao, C. Jinxian [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Xuewen Z. Total Digital Controlling System For Mine Elevator. / Z. Xuewen [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Jie S. STD micro-computer monitoring system for mine hoist. / S. Jie [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Yu-Lin L. Design of Novel Control System of Mine Hoist. / L. Yu-Lin. Coal Mine Machinery; 2009–03 [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Yu-feng Z., De-yang Y. Reformed Design of Mine Winch Electric Control System Based on PLC Variable-frequency. / Z. Yu-feng, Y. De-yang [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Douzhang D., Bin P. Technical Design of a Series Gantry Planer Main Driving System Based on Siemens M4 Controller. / D. Douzhang, P. Bin [Электронный ресурс]. – Режим доступа: http://en.cnki.com.cn/Article_en/.
- Портал
Охрана труда
. [Электронный ресурс]. – Режим доступа: http://www.ohranatruda.in.ua/pages/. - ООО
Укрэлектросервис
. [Электронный ресурс]. – Режим доступа: http://www.ukrelektroservis.com.ua/production. - НПК
Горные машины
. [Электронный ресурс]. – Режим доступа: http://www.mmc.kiev.ua/production/. - ПО
Укрспецкомплект
. [Электронный ресурс]. – Режим доступа: href="http://ukrsk.com.ua/pult_shahtn_pod. Интергормаш
. [Электронный ресурс]. – Режим доступа: http://igm.com.ua/index.- Дубинский А.А., Сорокин Н.Н. Стволовая сигнализация шахтных подъемных машин с применением искробезопасной шины передачи данных. / А.А. Дубинский, Н.Н. Сорокин [Электронный ресурс]. – Режим доступа: http://deg-automatica.dn.ua/pdf/.
- Дубинский А.А.
Структура искробезопасных полевых шин управления и передачи
данных. / А.А. Дубинский, А.А. Дубинский,
В.Д. Власов //
Взрывозащищенное
электрооборудование: сб. науч. тр. УкрНИИВЭ. – Донецк: ООО
Юго-Восток, Лтд
, 2008. С. 221–225. - Жданкин В. Применение fieldbus-систем во взрывоопасных зонах / В. Жданкин // Современные технологии автоматизации. 2006. Выпуск 4. С. 76–80.
- Криворізький національний університет. [Электронный ресурс]. – Режим доступа: http://ktu.edu.ua/Files/.
- УКРНИИВЭ. [Электронный ресурс]. – Режим доступа: http://ukrniive.com.ua/article/.
- Задума
С.В. Анализ способов управления производительностью скиповой подъемной
установки / С.В. Задума, Б.В. Гавриленко //
Донбас–2020: перспективи розвитку очима молодих вчених
: Cб. наукових праць. V науково-технічної конференції аспирантів та студентів у м. Донецку 24–26 квітня 2012 г. – Донецьк, ДонНТУ, 2012. - Задума С.В. Аппаратура учета производительности шахтной подъемной установки / С.В. Задума, Б.В. Гавриленко // «Автоматизация технологических объектов и процессов. Поиск молодых»: Cб. научных трудов. XI научно-технической конференции аспирантов и студентов в г. Донецке 17–20 мая 2011 г. – Донецк, ДонНТУ, 2011. – 306 с.
- Разумный Ю.Т., Мазур С.Н. – Определение расчетной мощности шахтной подъемной установки с приводом АФ-РА. / Ю.Т. Разумный, С.Н. Мазур. // Гірнича електромеханіка та автоматика – 2004. Випуск 72. С. 34–39.
- Дацковский Л.Х.,
Роговой В.И. Электропривод
шахтных стационарных установок.
Современное состояние и перспективы. / Л.Х. Дацковский,
В.И. Роговой – В кн.:
Міжвідомчий науково-технічний збірник
. Випуск 66.Електромашинобудування та електрообладнання
. – Київ: Техника, 2006. С. 94–102. - Бирюков А.В., Шухер В.И., Католиков В.Е. и др. Автоматизированный тиристорный электропривод постоянного тока для шахтных подъемных машин. / А.В. Бирюков, В.И. Шухер, В.Е. Католиков // Автоматизированный электропривод. Сб. научных трудов. – Москва, 2002. С. 71–89.
- Дацковский Л.Х., Бирюков А.В., Кузнецов И.С. и др. Безредукторный частотнорегулируемый синхронный электропривод производственных механизмов. / Л.Х. Дацковский, А.В. Бирюков, И.С. Кузнецов // Автоматизированный электропривод: Сборник научн. трудов.– Москва, 2002. С. 43–70.
- Дацковский Л.Х., Бирюков А.В. и др. Частотнорегулируемый синхронный электропривод мощностью 5000 кВт вентиляторной установки // Проблемы автоматизированного электропривода. Теория и практика. – Харьков: Основа, 1997. С. 190, 191.
- Кочетков В.Д., Дацковский Л.Х., Бирюков А.В. и др. Системы регулирования электроприводов переменного тока с микропроцессорным управлением. / Л.Х. Дацковский, А.В. Бирюков // Электротехническая промышленность. Сер. 08. Электропривод: Обзор, информ. – 1989. Вып. 26. С. 1–80.
- Серия тиристорных преобразовательных агрегатов АТ и АТР мощностью до 5000 кВт для автоматизированных электроприводов постоянного тока. Отраслевой каталог 05.03.29. – 74. – М.: Информэлектро, 1974.
- Серия тиристорных преобразовательных агрегатов ТПЗ и ТПРЗ мощностью 1000–12000 кВт на тиристорах Т-320. Отраслевой каталог 05.03.14229–74. М.: Информэлектро, 1976.
- Электроприводы комплектные тиристорные постоянного тока мощностью 530–2000 кВт для шахтных подъемных машин. Отраслевой каталог 08.50.02–76. – М.: Информэлектро, 1976.
- Динкель А.Д., Католиков В.Е., Седунин А.М. Синтез САУ тиристорным приводом рудничного подъема с учетом зоны прерывистых токов. / А.Д. Динкель, В.Е. Католиков, А.М. Седунин // Электротехническая промышленность. Электропривод. – 1980. Вып. 7(87). С. 7–10.
- Динкель А.Д., Католиков В.Е., Седунин А.М. Синтез САУ тиристорным приводом рудничного подъема с учетом зоны прерывистых токов. / А.Д. Динкель, В.Е. Католиков, А.М. Седунин // Электротехническая промышленность. Электропривод. – 1981. Вып. 2(91). С. 20–23.
- Решмин Б.И., Ямпольский Д.С. Проектирование и наладка систем подчиненного регулирования электроприводов. / Б.И. Решмин, Д.С. Ямпольский – М: Энергия, 1975. – 184 с.
- Соловьев В.С. Стационарные машины и установки. Шахтные подъемные установки. / В.С. Соловьев [Электронный ресурс]. – Режим доступа: http://www.twirpx.com/file/.
- Персональный сайт Степанова Анатолия Григорьевича, Заслуженного деятеля науки Российской Федерации, доктора технических наук, профессора. [Электронный ресурс]. – Режим доступа: http://agstepanov2009.narod.ru/.
-
Голубенцев А.Н. Исследование динамики рудничного подъема. Автореферат. г. Сталино. / А.Н. Голубенцев [Электронный ресурс]. – Режим доступа: http://www.uran.donetsk.ua/~masters.
- Дворников В.И.,
Соломенцев К.А. Математическая модель динамики подъемных машин
с
бегущими витками трения. / В.И. Дворников,
К.А. Соломенцев // Сб. научн.
трудов НИИГМ имени М.М. Федорова
Проблеми експлуатації обладнання шахтних стаціонарних установок
. – Вип. 96, –Донецк, НИИГМ имени М.М.Федорова, 2003. С. 92–102. - Дворников В.И.,
Трибухин В.А. Математическая модель динамики подъемных
установки
в режимах предохранительного торможения. / В.И. Дворников,
В.А. Трибухин // Сб. научн. трудов НИИГМ
имени М.М. Федорова
Проблеми експлуатації обладнання шахтних стаціонарних установок
. Вип. 95, – Донецк, НИИГМ имени М.М.Федорова, 2002. С. 96–138. - Дворников В.И., Чехлатый А.Н. Переходные состояния подъемной установки при посадке и снятии с оснований сосудов. / В.И. Дворников, А.Н. Чехлатый // Уголь Украины, 1982. Вып. 4. С. 24–26.