Реферат по теме выпускной работы
Содержание
Введение
Осязание – это наиболее обширный орган чувств человека, так как тактильные клетки, расположенные в коже и слизистых оболочках, распространены по всему телу. Тактильное восприятие наряду с другими видами чувств человека является чрезвычайно важным элементом для полноценного физического взаимодействия с окружающей средой, будь то, ходьба, бег, сидение на стуле, избегание препятствий, манипулирование предметами либо использование предметов, взаимодействие с другими агентами. В каждом из приведенных взаимодействий, тактильное восприятие служит для определения условий контакта между действующим агентом и окружающей средой или другими агентами. Тактильное восприятие в общем смысле, описывает измерение многих условий контакта между двумя поверхностями, в том числе, зону контакта, давление, температуру, сдвиг или текстуру. На самом деле это то, что делает система осязания человека для определения различных типов физического взаимодействия, которое человеку приходится встречать при взаимодействии нашей кожи и окружающей среды.
Актуальность темы
В последние несколько десятков лет наблюдается активное развитие робототехнических комплексов и систем искусственного интеллекта. Роботы предназначены не только имитации физических действий человека, но и для помощи в деятельности человека, решению различного рода прикладных задач. При создании таких систем используются методы, базирующиеся на моделировании особенностей восприятия, переработки и отображения информации. Тактильное взаимодействие является одним ключевых взаимодействий между роботом и человеком, либо между роботом и роботом. Использование искусственной кожи в робототехнике помогает адаптировать поведение робота к внешним силам, повысить ловкость и интеллектуальное взаимодействие, которые возникают в процессе взаимодействия робота с окружающей средой и человеком.
Приложения тактильных датчиков возможно использовать в различных областях, включающих в себя искусственную кожу для роботов, медицинские приложения, протезирование, приложения реабилитации, устройства безопасности, человеко-машинный интерфейс, автоматизация, спортивные приложения, виртуальная реальность и многое другое.
Цели и задачи исследования
Целью моей магистерской работы является исследование и разработка прототипа искусственной кожи, пригодного к использованию для покрытия участков тела гуманоидного робота.
Основные этапы исследования:
- Библиографический обзор существующих подходов и систем реализации искусственной кожи;
- Выбор и обоснования выбора системы искусственной кожи;
- Разработка и отладка аппаратной части;
- Разработка новых и модификация существующих моделей нейронной сети для обработки данных для получения картины распределение давления для определения внешних физических воздействий на искусственную кожу;
- Экспериментальное исследование разработанного прототипа искусственной кожи.
Для экспериментальной оценки теоретических и практических полученных результатов планируется апробация разработанного прототипа искусственной кожи на реальных роботах в лаборатории ETIS университета Сержи-Понтуаз (Université de Cergy Pontoise), Франция.
Обзор существующих систем искусственной кожи
Разработка тактильных датчиков, возможных для применения в виде искусственной кожи для роботов является актуальной проблемой робототехники и привлекает внимание многих ученых, преимущественно европейских, американских, канадских, японских ученых.
Появление тактильных датчиков, предназначенных для геометрического распознавания предметов окружающего пространства, обусловлено развитием робототехники. Основная тенденция в области создания тактильных датчиков – воспроизведение осязательных свойств человеческой кожи. Этой тенденции в наибольшей степени удовлетворяют тактильные устройства матричного типа, так как каждая ячейка матрицы, представляющая собой микроэлектронный датчик силы (или деформации, момента), дает конкретную информацию, а все вместе позволяют сформировать целостное представление о форме предмета.
Тактильные датчики могут классифицироваться по принципу работы и физической природе. По принципу работы тактильные датчики можно разделить на резистивные, емкостные, индуктивные, оптические, магнитные, пьезоэлектрические, ультразвуковые, магнитоэлектрические. Кроме того, по физической природе датчики могут быть гибкими, эластичными, жесткими и твердыми, и т.д.
Современные тактильные датчики для роботов должны обладать следующими свойствами [1]:
высокой чувствительностью, способность воспринимать давление (силу), преобразовывать его в электрические сигналы, позволяющие определить форму и материал предмета;
высоким пространственным разрешением;
хорошими линейными характеристиками (допустимы лишь отклонения, компенсируемые при обработке сигнала на ЭВМ);
незначительным гистерезисом;
устойчивостью к перегрузкам и тяжелым условиям работы;
небольшим размерам и массой;
минимальным содержанием проводов в чувствительной зоне;
простой механизм монтажа или присоединения;
низкой себестоимостью.
Ниже привожу описание различных типов тактильных датчиков [2]:
Резистивные датчики обычно состоят из двух проводящих слоев, разделенных воздухом либо непроводящим материалом. Принцип их работы основан на резистивном принципе. Бывают двух типов: а) сопротивление зависит от места приложения силы; б) сопротивления зависит от величины приложенной силы. Резистивные датчики, чувствительны и дешевы, но обладают большим энергопотреблением. Недостатком резистивных датчиков является также то, что обычно они способны определить лишь одну точку контакта.
Пьезорезистивные датчики изготавливаются из материала, сопротивление которого изменяется с силой / давлением. Система, построенная на датчиках подобного типа, была использована для создания антропоморфной руки [3]. Датчики силы FSR (Force Sensing Resistors) (рис.1), основанные на пьезоэлектрическом эффекте, широко используются в устройствах, определяющих положение. Такие датчики имеют широкое использование из-за низкой стоимости, низкого уровня шума, простой электроники и высокой чувствительности. Встречаются во многих экспериментальных тактильных системах [4]. Обладают недостатками: требуют ручной или серийной сборки на высоком технологическом уровне, обладают нелинейным откликом и имеют гистерезис, выполняются на сравнительно жесткой подложке.
 Рисунок 1 - Датчики силы FSR.
Рисунок 1 - Датчики силы FSR.
Тактильные датчики из композитных материалов, основанные на эффекте квантового туннелирования (Quantum Tunnel Composites, QTC). QTC имеют уникальную способность переходить из состояния практически идеального изолятора в состояние проводника при приложение к нему силы: сжатия, деформации, скручивания, растяжения материала. Переход из состояния изолятора в состояние проводника происходит по экспоненциальной зависимости. Композитные материалы состоят из частиц металла и непроводящего ток резинового связующего элемента.
Емкостные тактильные датчики состоят из пластинчатого конденсатора, в котором расстояние между пластинами или эффективная площадь изменяются при приложении силы посредством изменения положения. И соответственно изменением этого расстояния вызывается изменение электрической емкости конденсатора. Емкостные датчики могут производится очень маленького размера, что позволяет построить массив датчиков (рис. 2, 3, [5]), а также позволяют проводить измерения в динамике. Обладают высокой чувствительностью, пространственным разрешением и быстродействием, невосприимчивостью к помехам и возможностью расположить на пальцах робота любой конструкции.
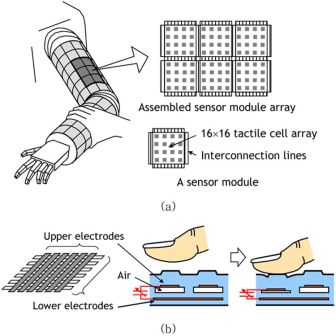 Рисунок 2 – Схематическое изображение модульного, расширяемого емкостного датчика: (а) массив модулей датчика, (b) структура одной ячейки датчика. Емкость тактильного датчика изменяется, в зависимости от изменения воздушного просвета в функции приложенной силы.
Рисунок 2 – Схематическое изображение модульного, расширяемого емкостного датчика: (а) массив модулей датчика, (b) структура одной ячейки датчика. Емкость тактильного датчика изменяется, в зависимости от изменения воздушного просвета в функции приложенной силы.
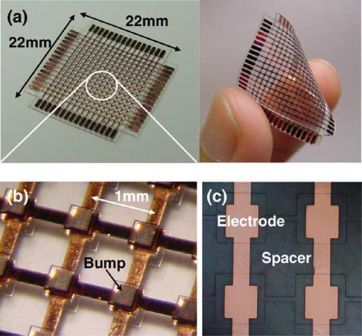 Рисунок 3 – (а) Изготовленный модуль тактильного датчика, (b) увеличенное изображение ячейки, (c) нижние электроды и разделительный слой (spacer).
Рисунок 3 – (а) Изготовленный модуль тактильного датчика, (b) увеличенное изображение ячейки, (c) нижние электроды и разделительный слой (spacer).
Оптические тактильные датчики основаны на изменении оптических свойств параметров материала, под действием приложенной к ним силы. Оптические датчики могут измерять маленькие величины силы, как 0,001Н с пространственным разрешением 5 мм. [6]. Оптические тактильные датчики нечувствительны к электромагнитным полям, гибкие, чувствительные, быстрые, но в тоже время они громоздкие.
Акустические ультразвуковые датчики еще одна технология, которая используется для создания тактильных датчиков. Основным элементом ультразвукового датчика является электроакустический преобразователь, в качестве которого часто используется пьезоэлектрический керамический элемент. Поскольку один и тот же преобразователь используется обычно как для передачи, так и для приема сигналов, для обнаружения объектов в ближней зоне необходимо быстрое демпфирование акустической энергии. Это достигается путем применения акустических поглотителей и развязкой преобразователя от корпуса. Конструкция корпуса позволяет получить узкий акустический поток, дающий мощный направленный сигнал. Преимуществом таких датчиков является быстрый динамический ответ и высокое разрешение.
Магнитные тактильные датчики основаны на принципе измерения плотности потока, порожденного приложенной силой. Измерение может быть достигнуто путем эффекта Холла [7], или магниторезистивным. Датчики на основе магнитного принципа имеют ряд преимуществ, в том числе: высокая чувствительность, большой динамический диапазон, линейный отклик, физическая надежность и не имеют механический гистерезис. Однако их использование ограничено в немагнитной среде.
Работа пьезоэлектрического датчика основана на свойстве некоторых кристаллов выделять на поверхность заряды при сжатии или растяжении. Примером таких кристаллов являются кварц, сегнетокерамика и другие. Измеряемое давление воспринимается мембраной и передается пьезочувствительным пластинам. Напряжение снимается с металлических прокладок. Температурная чувствительность пьезоэлектрических материалов является одной из основных причин малого их использовании в качестве датчиков.
В таблице 1 кратко представлены характеристики различных типов тактильных датчиков.
Таблица 1 – Преимущества и недостатки различных типов тактильных датчиков [2].
|
Резистивный
|
- чувствительность
- низкая себестоимость
|
- высокое энергопотребление
|
|
Пьезорезистивный
|
- низкая себестоимость
- чувствительность
- низкий уровень шума
- простая электроника
|
- жесткость и хрупкость
- нелинейный ответ
- гистерезис
- чувствительность к температуре
|
|
Эффект квантового туннелирования
|
- чувствительность
- гибкость
|
|
|
Емкостной
|
- чувствительность
- низкая себестоимость
|
- неустойчивость к перекрестным помехам
- гистерезис
- сложность изготовления
|
|
Оптический
|
- устойчивость к электромагнитным помехам
- гибкость
- чувствительность
- быстрота работы
|
- громоздкость
- высокая потребляемая мощность
- сложность вычислений
|
|
Ультразвуковой
|
- быстрый динамический ответ
- высокое разрешение
|
- ограниченные утилиты на низких частотах
- сложность изготовления
- чувствительность к температуре
|
|
Магнитный
|
- чувствительность
- большой диапазон
- отсутствие механического гистерезиса
- физическая прочность
|
- чувствительность к магнитным помехам
- громоздкость
- высокое потребление энергии
|
|
Пьезоэлектрический
|
- хорошие динамические характеристики
- большая полоса пропускания
|
- чувствительность к температуре
- не надежные электрические соединения
|
|
Проводящая резина
|
- гибкость, эластичность
- низкая себестоимость
- низкое энергопотребление
|
- механический гистерезис
- нелинейный ответ
|
В дальнейшем исследовании, в качестве тактильного датчика, для создания искусственной кожи была выбрана проводящая резина, в виду своей низкой стоимости и электропотребления. Также преимуществом такого типа искусственной кожи является то, что ей возможно покрытие больших участков поверхности робота, отсутствие проводов в большей части контактной зоны. В качестве проводящей резины была выбрана проводящая ткань Velostat®.
Исследование моей магистерской работы плотно пересекаются и продолжают исследования, представленные в магистерской работы Анны Пугач [8, 9].
Исследование проводящего материала Velostat®
Материал Velostat® [12] представляет собой непрозрачную объемно-проводящую пленку, наполненную полиолефином. Материал является очень гибким и немного эластичным. Электрические свойства материала не зависят от влажности и не подвержены старению. Активное сопротивление материала уменьшается при приложении давления. Если материал расположить между двумя проводящими слоями, возможно использовать материал в виде датчика давления либо изгиба. Он может быть также использован для определения точки касания.
Целью исследования является измерение электрических характеристик отклика материала Velostat® [8]. Для исследования был взят материал размером 80 х 35 мм. На нем закрепили 4 электрода, одна пара для подачи постоянного тока величиной 200 мА, другая для измерения напряжения. В центр куска ткани прикладывается сила с поверхностью контакта диаметром 25 мм, величина которой измеряется датчиком силы FSR 154. Опыты проводились с проводящим и непроводящим объектом (рис. 4). И результаты измерения: графики изменения, давления, прикладываемого к материалу, и сопротивления материала, во временных осях, приведены ниже (рис. 5, 6):
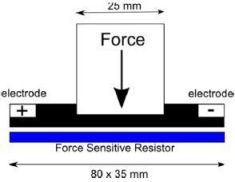
 Рисунок 4 – Экспериментальная установка для измерения свойств проводящей пленки Velostat® при физическом контакте с объектом
Рисунок 4 – Экспериментальная установка для измерения свойств проводящей пленки Velostat® при физическом контакте с объектом
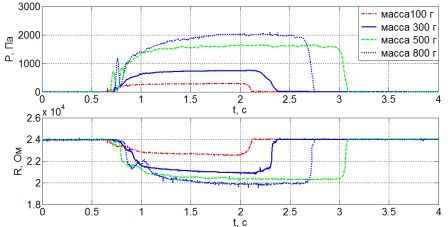 Рисунок 5 – Характеристики проводящей пленки Velostat® при взаимодействии с проводящим объектом
Рисунок 5 – Характеристики проводящей пленки Velostat® при взаимодействии с проводящим объектом
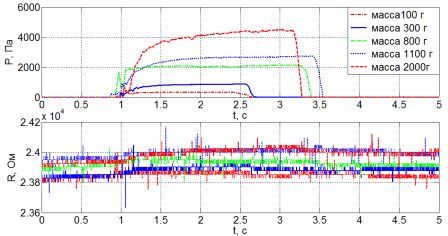 Рисунок 6 – Характеристики проводящей пленки Velostat® при взаимодействии с непроводящим объектом
Рисунок 6 – Характеристики проводящей пленки Velostat® при взаимодействии с непроводящим объектом
По результатам (рис.5, 6) можно сделать вывод о том, что материал Velostat® слабо реагирует на непроводящие объекты. Сопротивление материала изменяется незначительно, на 1.5 % при контакте с непроводящим объектом, но при контакте с проводящим объектом изменяется на 30-50 %.
Но это измерение произведено с предположением того, что полное сопротивление ткани Velostat® имеет чисто активный характер. В ходе наших исследований, возникло предположение, что ткань также обладает каким-либо реактивным сопротивлением. Для проверки этого, была снята переходная характеристика материала в ненагруженном состоянии. Для этого на одну пару электродов был подан скачок напряжения, амплитудой 6.5 В (рис. 7, черная линия), а с другой пары – снят отклик ткани (рис. 7, красная линия):
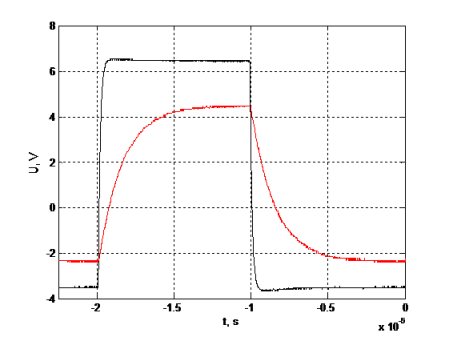 Рисунок 7 – Переходная характеристика материала Velostat® в ненагруженном состоянии
Рисунок 7 – Переходная характеристика материала Velostat® в ненагруженном состоянии
По результатам данного исследования можно сделать вывод, что исследуемы материал обладает также реактивным сопротивлением, и может быть представлен апериодическим звеном первого порядка, при допущении, что свойства материала неизменны с течением времени. Передаточная функция будет иметь вид:

где,
- Т=1.3736 мкс – постоянная времени звена;
- k=0.6214 – коэффициент передачи звена.
По результатам данных опытов был сделан вывод, что для искусственной кожи, основанной на материале Velostat®, целесообразно использовать переменный ток частотой около:  . (Переходный процесс закончиться при времени 5•Т, но для небольшого запаса будем использовать переменный ток периодом 10•Т).
. (Переходный процесс закончиться при времени 5•Т, но для небольшого запаса будем использовать переменный ток периодом 10•Т).
Электроимпедансная томография (ЭИТ)
Это методика, позволяющая определить пространственное распределение электрического импеданса (или проводимости) внутри объекта по результатам неинвазивных электрических измерений. Для реконструкции изображения используются значения электрического потенциала, измеренные на поверхности объекта, при пропускании через него тока. Методика ЭИТ направлена на реконструкцию изображения поперечного сечения (2D, 3D) внутреннего пространственного распределения электропроводности, путем введения малых значений токов (постоянного или переменного тока) с помощью электродов, размещенных на поверхности исследуемого объекта и измерением электрического потенциала [10]. Метод ЭИТ нашел широкое применение в медицине, промышленности, природных и прикладных науках. Существует несколько методов измерений, которые используются в ЭИТ. В работе Браун и Сегар [11] предложен метод соседних электродов. На рис. 8 представлена идея этого метода для цилиндрического проводника с 16 симметрично расположенными электродами. Сначала ток подводится к электродам в пару 1-16, между которыми плотность тока выше, чем между остальными. Плотность тока быстро уменьшается в функции от расстояния.
Далее, мы измеряем разность напряжений между другими парами электродов, что соответствует 13 измерений для реконструкции сопротивление. На следующем шаге, мы вводим тока через другую пару электродов 2-1, и измеряем последовательно 13 возможных падений напряжения. То есть для одного цикла измерениймы получим 13•16 = 208 измерений напряжения.
 Рисунок 8 – Метод соседних электродов ЭИТ для цилиндрического проводника с 16 симметрично расположенными электродами.
(анимация: 7 кадров, 10 циклов повторения, 55 килобайт)
Рисунок 8 – Метод соседних электродов ЭИТ для цилиндрического проводника с 16 симметрично расположенными электродами.
(анимация: 7 кадров, 10 циклов повторения, 55 килобайт)
Существуют еще и другие методы сбора данных, которые могут быть использованы совместно с методом ЭИТ. Метод перекрестных электродов [12] не обладает хорошей чувствительностью на удаленных электродах так же хорошо, как метод соседних электродов, но имеет лучшую чувствительность по всей области. Метод противоположных измерений импеданса дает более равномерное распределение тока и имеет хорошую чувствительность. Кроме того существует адаптивный метод [88], который предлагает нелинейную зависимость между размерами проводника, числом пар электродов и значением введенного тока с целью получения однородного распределения тока.
В дальнейших моих исследованиях будет использоваться метод соседних электронов измерения и сбора данных с проводящего материала Velostat®, и после сбора буду использовать методику ЭИТ для реконструкции изображения. Хотя возможно будет использован и другой подход для реконструкции изображения, посредствам использования искусственных нейронных сетей.
Выводы
Моя магистерская работа посвящена актуальной научной задаче в области робототехники созданию тактильного датчика, для применение в виде искусственной кожи для гуманоидного робота. К настоящему моменту, а рамках проведенных мною исследований выполнено:
Проанализированы существующие системы тактильных датчиков, возможных для использования в качестве искусственной кожи.
Выбран тип наиболее подходящего типа тактильного датчика – проводящей резины. В качестве проводящей резины была выбрана проводящая ткань Velostat®.
Проведен ряд экспериментов по исследованию материала Velostat®.
Проанализирован метод сбора данных с проводящего материала и реконструкции изображения распределения давления на поверхности проводящей ткани, в основе которого будет использован метод соседних электродов, метода ЭИТ.
Дальнейшие исследования направлены на следующие ключевые моменты:
Разработка и создания аппаратной части тактильного датчика для физического взаимодействия человек-робот.
Реализация алгоритмов реконструкции изображения, основанных на использовании искусственных нейронных сетей.
Оценка и экспериментальные исследования разработанного прототипа искусственной кожи.
Замечание
Выражаю огромную благодарность всем, кто принимает участие в написании данной работы и проведении исследований.
На период написания данного реферата магистерская работа еще не завершена. Завершение работы – январь 2014 года. Более подробную информацию по этим исследованиям можно получить у автора, а полный текст и материалы работы – после завершения магистерской работы.
Список источников
П.М. Таланчук, С. П. Голубков, В. П. Маслов. Сенсоры в контрольно-измерительной технике // Киев. Техника, C. 1991. –173.
R.S. Dahiya, M.Valle. Tactile sensing for robotic applications.
Karsten Weiss, Heinz Woern. Tactile Sensor System for an Anthropomorphic Robotic Hand.
M. A. Diftler, R. Platt Jr, C. C. J., R. O. Ambrose, W. J. Bluethmann. Evolution of the nasa/darpa robonaut control system // IEEE Int. Conf. on Robotics and Automat., 2003‒P. 2543–2548.
Hyung-Kew Lee, Sun-Il Chang, and Euisik Yoon. A Flexible Polymer Tactile Sensor: Fabrication and Modular Expandability for Large Area Deployment // Journal of microelectromechanical systems, vol. 15, no. 6, december 2006.
Yoshiyuki Ohmura, Yasuo Kuniyoshi, Akihiko Nagakubo. Conformable and Scalable Tactile Sensor Skin for Curved Surfaces // Proceedings of the 2006 IEEE International Conference on Robotics and Automation Orlando, Florida - May 2006.
E. Torres-Jara, I. Vasilescu, R. Coral. A soft touch: Compliant tactile sensors for sensitive manipulation // CSAIL, Massachusetts Institute of Technology, Tech. Rep., 2006.
А. А. Пугач. Усовершенствование алгоритмов управления движением сфероподобных объектов на моторизированной плоскости с помощью тактильной обратной связи с использованием искусственной кожи и надежность предложенной технической системы. Руководители: д.т.н., проф. Ковалев А. П., к.т.н Александр Питти (Университет Сержи-Понтуаз).
G. Pugach, V. Khomenko, A. Melnyk, A. Pitti, P. Henaff, P. Gaussier. Electronic hardware design of a low cost tactile sensor device for physical Human-Robot Interactions. IEEE ELNANO 2013 XXXIII International Scientific Conference Electronics and nanotechnology, - Kyiv, Ukraine : IEEE. – April 16-19, 2013. – pp. 445 – 448.
A. Adler, R. Guardo. Electrical impedance tomography: regularized imaging and contrast detection // Apr. 1996. IEEE Transactions on Medical Imaging, 15(2):170-179.
Brown B H, Seagar A. Applied potential tomography data collection problems // Int. Conf: on Electric and Phjsiol. Mras. 8 13-3 I.
Kauppinen P, Hyttinen J, Malmivuo J (2006): Sensitivity distribution visualizations of impedance tomography measurement strategies. Int. J. Bioelectromagnetism 8:(1) pp. VII/1 - VII/9.
Plug and Wear [электронный ресурс]. - Режим доступа: www.plugandwear.com