
Abstract
Сontent
- Introduction
- 1. Theme urgency
- 2. The purpose and objectives of the study
- 3. Ways and means of reducing the dynamic loads subsystem drive executive OK KDK500
- 4. The study of dynamic processes of the executive body of the drive unit
- Conclusion
- The list of the used litterature
Introduction
Increased productivity and reduced specific energy consumption during mining are the main tasks of doing excavation work. A necessary condition for profitability of the coal business is the need to increase coal production and reducing its cost.
Increasingly complex operating conditions require the development of more modern machines. This can be achieved improving the technical and economic performance through the use of machines make informed choices of their parameters. Reasonable change some machine parameters can significantly increase their productivity without significant design improvements [2].
In this regard, relevant and necessary is the rational choice of treatment regime parameters used cars in order to increase the efficiency of their operation, which results in improved performance of the equipment complex. Improving the design flaws harvesters identified in the course of their operation, leading to increased reliability of water treatment machines and may reduce their downtime.
Also there is a question of power subsystems reduce the load on the basis of optimizing the dynamic properties of harvesters in the destruction of the complex structure of coal seams and uneven moving them along the face.
Thus, the rationale parameters of shearer is the actual scientific problem area and consideration of a wide range of issues.
1. Theme urgency
An important role in the modern coal industry plays competitiveness of mining machinery products by improving their technical proficiency. As the experience of the advanced areas of engineering, one solution to this problem is the widespread introduction of mathematical modeling of business processes and optimize the structure and parameters in all stages of a new technology from design to bring the series-produced vehicles [1].
For shearers urgent task of improving the resource to a level corresponding to world standards. The solution of these problems requires improving quality and reducing design time, as well as the development of new technology [2].
The study and the creation of machines methods of mathematical modeling business processes, are the basis of CAD, but not yet widely used. One reason for the shortcomings - the lack of the general concept of mathematical modeling workflows MW, and insufficient study of the patterns of formation of stress in interacting subsystems machines as autonomous stochastic nonlinear systems.
2. The purpose and objectives of the study
The purpose of this master's thesis is to improve the technical level of the drive of the executive body of the shearer through the development and implementation of a simulation of mathematical models of their workflow. The model allows to establish the laws and justify the rational structure and parameters. To achieve the objectives were formulated and solved the following problems:
- Developed a mathematical model of the executive body of the drive, which describes the processes of formation of dynamic loads.
- The technique and software for debugging stage for computational experiments.
- Establishment of the formation of dynamic loads in steady-state and transient operating conditions.
- Investigated the possible structure and parameters of the drive and installed the most rational of them that can reduce stress levels in different modes.
3. Ways and means of reducing the dynamic loads subsystem drive executive OK KDK500
When working shearer its power systems are subject to external and internal influences.
External disturbances systems combine the inputs (the executive, devices for loading and transportation of coal and chipped rock pillars combine with the supply side) are stochastic in nature.
Among the internal disturbances in power systems should include disturbance of gear couplings, gears, the perturbations of the electric motors, hydraulic machines (pumps, motors).
The interaction of the above-mentioned power of dynamic systems is very complex and is caused by external and internal links.
External relations are manifested in the impact on the formation of the external perturbations of oscillatory processes in interacting systems, machines, and internal - are due to dynamic properties, connectedness of these systems.
The implementation of high value sustainable moments drive at high parameters of rock mass destruction by the executive organ of the modern combine harvesters equipped with sufficiently robust controls load, is known to lead to high dynamic loading of the power systems of machines and, above all, drive systems executive. As a result, reliability and durability are reduced harvesters, and consequently their productivity.
Consider the formation of dynamic loads in the drive systems on the example of widespread coal combines with screw bodies.
Under steady operating conditions in the spectral composition of the load screw drive systems of modern combine harvesters along with random components of a substantial proportion of low-frequency and high-frequency oscillatory components.
Low-frequency oscillations (1-3 Hz) is largely due to the peculiarities of the formation of the resistance moment in screw executive bodies, movement of the axes of rotation which is characterized by significant non-uniformity in the direction of travel of the combine and the direction perpendicular to the plane of the sheet.
High-frequency oscillatory components with the correlation functions of the form
∑Di*e^-α1i(τ)*cosω1iτ/∑D2j*cosω2jτ characterized by frequencies (8-50 Hz), almost coinciding with the calculated values of the natural frequencies of torsional vibration of the drive system and the self-oscillating due to complex processes in a single system combine-face
.
In order to provide a clearer laws governing the formation of dynamic loads in drive systems, it is methodologically appropriate to consider these oscillatory processes conventionally composed of primary and secondary oscillations.
Primary high-frequency components due to the stochastic nature of the load on the blades of the executive body. In this case, the fluctuation bursts of resistance forces that act as self-oscillating valve system, the spin system under consideration by a certain amount of angular deformation, after which there is cleavage of the array. Feedback from the oscillatory system is that the elastic and inertial properties determine the further movement of the oscillatory.
In this case, oscillations in general, are stochastic and slabodempfirovannyh systems, which should also include the drive system combines the mountain can be seen as a free-vibration accompanying with random levels and the frequency of disturbance.
The primary low-frequency components due to variations in the resistance moment due to inefficient placement of the cutting tool on the other organs and depend on the design features of the screws [4].
4. The study of dynamic processes of the executive body of the drive unit
At the present stage of development of mining is advisable to use the best series shearers with enhanced reliability and adaptability. One of the main ways to improve the reliability of OK is the reduction of dynamic loading. And the electromechanical actuator subsystem executive. To identify patterns in the formation of dynamic loading of the drive subsystem executive, along with the experimental methods used mathematical modeling simulation [8],[11].
In this paper we consider the master drive executive KDK500 shown in pic. 1.
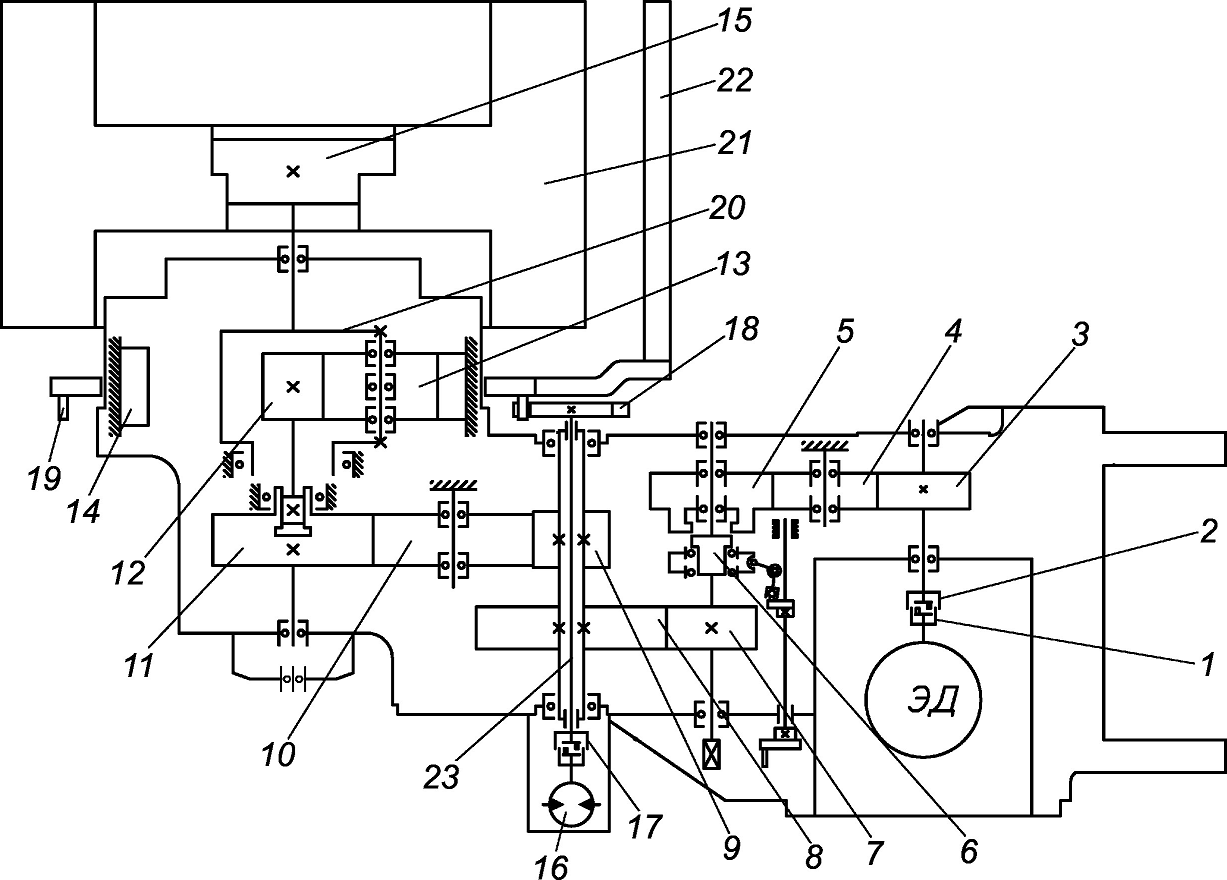
Рiс.1 – Kinematic drive unit executive KDK500
For studies of dynamic processes of the executive body of the drive unit, developed a simplified mathematical model of the drive, which takes into account the kinematic components of the load. This model allowed us to obtain preliminary data on the formation of the motion loads in the drive.
To solve the problem - the development of a mathematical model of the executive body of the drive KDK500 :
- that all elements of the scheme are reduced to a system with a discrete lumped masses attached to the rotor of the motor gearbox and the masses of the executive body with attached masses of the output shaft;
- elastic and dissipative properties of the linear actuator taken and characterized by coefficients of stiffness С and resistance to β;
- bending deformation of the shaft, the radial deformation of their support - bearing units - taken as linear functions of the resultant vector of the radial load acting on the AI, and are characterized by stiffness coefficients C and resistance β;
- between torsional and lateral oscillations of the EUT is no internal dynamic link.
Equivalent design scheme for drawing mathematical model presented in the animation:
Figure 2 - Estimated mass model (Animation is made with GIF Animator. Consists of 6 frames at intervals of 500 ms.)
Presented at the estimated two-mass system, I1 - it's the moments of inertia of the rotor of the motor, I2 - the executive body, c - spring rate and β - drag coefficient.
For the generalized coordinates taken φ1, φ2, – the angles of rotation of the rotor, respectively elektrodvi ¬ gatelya and executive body corresponding to the masses with moments of inertia I1 ... I2, as well as the electromagnetic torque Md. All parameters are calculated dynamic scheme to the shaft of the EUT [6],[11].
Drafted by a mathematical model of the executive body of the drive was carried out using the fundamental equations of the Park-Goreva, as well as the use of the Lagrange equations of type II, resulting received the following system of nonlinear differential equations:
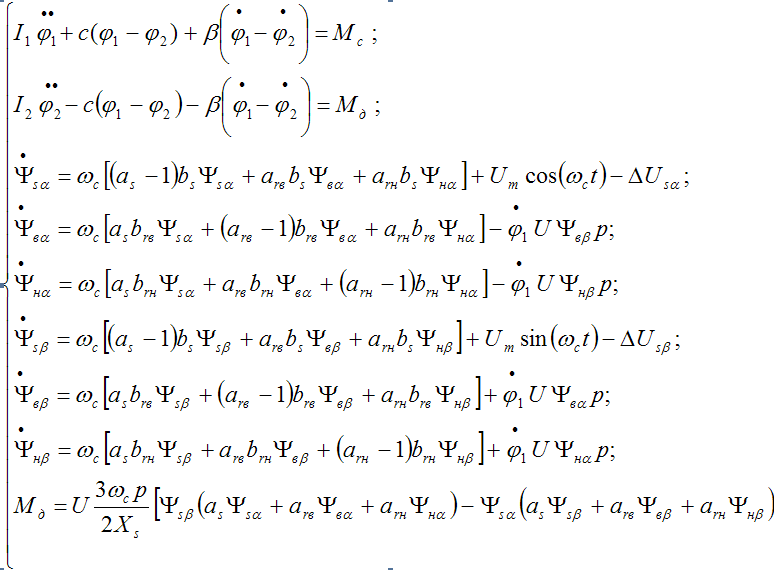
The first two equations describe the motion of the inertial mass of the executive body of the drive, the following seven - the dynamic processes occurring in the asynchronous motor [2],[3].
The dynamics of the asynchronous motor is used as the generalized coordinates of the rotor flux and stator ψsα, ψвα, ψнα, ψвβ, ψнβ, ψsβ.
The basis of the algorithm and the dynamic simulation program components of the load on the method of Runge-Kutta fourth-order, which was used to solve the CDE, with a constant step of integration. Selection is the most common method for solving such systems due to the high accuracy of less tendency to the instability of occurrence as compared to other numerical methods [8].
The developed program allows you to explore the dynamic processes in the drive of the executive body in different modes, to carry out computational experiments and optimization to obtain basic data for the calculations of the strength of the transmission.
Conclusion
The main conclusions, the scientific and practical results are as follows:
- A comprehensive simulation model of the operation, which includes:
- mathematical model of the load on the executive board on the results of simulations;
- mathematical model of the dynamics that takes into account nonlinear relationships due to the presence of asynchronous motor, elastic finger sleeve and pressure relief devices (induction motor dynamics is described by the equations of the Park-Goreva).
A comprehensive simulation model adequately describes the working process, along with the nonlinearity of the dynamic properties of the drive and the stochasticity of the workflow allows for transient dynamic processes in the asynchronous motor and allows you to model her work in the following modes: idle running, running under the rubble, the nominal mode of operation.
- With the use of the developed mathematical and software, as well as the methodology for computing research and optimization experiments were obtained and proved optimal structure and parameters of the executive body of the drive.
In writing this essay master's work is not yet complete. Final completion: December 2013. Full text of the work and materials on the topic can be obtained from the author or his manager after that date.
The list of the used litterature
- Сивокобыленко В.Ф., Костенко В.И. Математическое моделирование динамических режимов двухдвигательного асинхронного электропривода // Извести вузов. Энергетика.– Минск, 1974. – № 1. – с. 43-48.
- Гуляев В.Г., Сивокобыленко В.Ф., Жуков К.В. Математическая модель двухдвигательного привода исполнительных органов очистного комбайна // Труды Донецкого государственного технического университета. Выпуск 7, серия горно-электромеханическая. ДонГТУ. – Донецк, – 1999. – с. 97-102.
- Пинчук И.С. Переходные процессы в асинхронных электродвигателях при периодической нагрузке // Электричество. – 1957. – № 9. – с. 27-30.
- Гуляев В.Г. Проектирование и конструирование горных машин и комплексов. Часть 1. Выемочные комбайны //ГВУЗ "ДонНТУ", Технопарк ДонНТУ "УНИТЕХ", 2011.- 322с.
- Малеев Г.В., Гуляев В.Г., Бойко Н.Г., Горбатов П.А., Межаков В.А. Проектирование и конструирование горных машин и комплексов. – М.: Недра, 1988. – 368 с.
- Тарасенко В.А. Проведение вычислительных экспериментов с использованием сложных имитационных моделей горных машин // XXI столетие – проблемы и перспективы освоения месторождений полезных ископаемых: Сб. науч. трудов НГА Украины. № 3, Том 6. Горные машины и комплексы. – Днепропетровск: РИК НГА Украины, – 1998. – с. 71-75.
- Докукин А.В., Красников Ю.Д., Хургин З.Я. и др. Динамические процессы горных машин.– М.: Наука, 1972. – 150 с.
- Кондрахин В.П., Гуляев В.Г., Головин В.Л. Имитационная математическая модель динамических процессов очистных комбайнов высокой энерговооруженности с вынесенной системой подачи / Наукові праці донецького національного технічного університету. Випуск 12 (113). Серія гірничо-електромеханічна. Донецьк,2006.- с. 123-130.
- Нечепуренко М.С. Обоснование параметров и разработка узлов горных машин с упругим преобразователем движений.– Автореф. дисс… канд. техн. наук: 05.05.06 –Донецк, 1987. – 18 с.
- Докукин А.В. Оптимизация привода выемочных и проходческих машин. – М.: Недра, 1983. – 264 с.
- Тарасенко В.А. Моделирование рабочих процессов и обоснование параметров шахтной одновалковой дробилки для крепких пород. Диссертация на соискание учёной степени кандидата технических наук по специальности – ДонНТУ, Донецк, 2000.