









Реферат
Содержание
- Введение
- 1. Элементы ориентирования снимка
- 2. Искажения, возникающие при фотосъемке
- 3. Общие сведения о калибровке цифровой фотокамеры
- 4. Калибровка камеры мобильного телефона на тестовом полигоне
- Выводы
- Перечень ссылок
Введение
Либеральная ценовая политика на рынке портативных устройств связи в сочетании с их многофункциональностью сделали мобильные телефоны весьма популярными среди широких слоев населения. Однако данные устройства, изначально предназначенные для бытового использования, могут применяться и в иных сферах деятельности.
Современный мобильный телефон, оснащенный цифровой фотокамерой позволяет не только получить цветное изображение довольно высокого качества, но и выполнить обмен файлами устройства с компьютером или другим портативным устройством как по беспроводной сети, так и через кабельное подключение. Это дает возможность предполагать, что полученные снимки можно использовать как исходный материал для измерения различных объектов дистанционным методом. Однако, следует понимать, что идеальной оптической системы, не дающей никаких аберраций, не существует. А в камерах, не предназначенных для измерительных целей, их значение может достигать значительных величин. Минимизировать искажения можно, осуществив калибровку используемой камеры.
В настоящее время вопросу калибровки неметрических цифровых камер уделяется повышенное внимание, имеется большое количество публикаций, посвященных данной теме. Авторами работ предлагаются различные подходы к выполнению калибровки малоформатных камер. Однако предложенные подходы не всегда являются экономически оправданными и физически осуществимыми, особенно тогда, когда речь идет о камере мобильного телефона. К тому же, на сегодняшней научно не установлено, применимы ли камеры мобильных телефонов для измерительных целей.
Целью данной магистерской работы является исследование возможности практического применения калибровки камер мобильных телефонов для последующего их использования для фотограмметрических измерений. Для этого необходимо определить элементы ориентирования снимков, сделанных испытуемой камерой, что является основной научной задачей данной работы. На основе полученных результатов можно будет сделать вывод о том, возможно ли применять камеру мобильного телефона для измерительных целей.
Объектом исследования является фотокамера мобильного телефона, предметом – искажения оптической системы камеры мобильного телефона.
Калибровка камеры будет осуществляться с использованием калибровочного полигона.
1. Элементы ориентирования снимка
Элементами ориентирования снимка называются величины, определяющие его положение в момент фотографирования относительно выбранной пространственной прямоугольной системы координат. Различают элементы внутреннего и внешнего ориентирования снимка [1].
Элементы внутреннего ориентирования позволяют найти положение центра проекции относительно снимка, а значит восстановить связку проектирующих лучей, существовавшую в момент фотографирования. К ним относятся координаты главной точки x0, y0 снимка и фокусное расстояние f фотокамеры (рис.1.1) [1].

Рисунок 1.1 – Элементы внутреннего ориентирования снимка
Элементы внешнего ориентирования (ЭВО) позволяют установить положение снимка (связки), которое он занимал в момент фотографирования относительно заданной пространственной прямоугольной системы координат [1].
Различают абсолютные и относительные ЭВО снимка. Абсолютные элементы определяют положение связки в геодезической системе координат[1].
Таким образом, положение одиночного снимка определяется девятью элементами ориентирования, из них три – элементы внутреннего ориентирования и шесть – элементы внешнего ориентирования[1].
2. Искажения, возникающие при фотосъемке
Искажения снимков, сформированные системой оптики при фотосъемке называют аберрациями. В зависимости от природы происхождения аберрации бывают хроматическими и геометрическими. Причиной возникновения хроматических (то есть цветовых) аберраций является "неидеальность" оптики фотоаппаратов. Фактически этот вид искажения можно назвать свойством объектива. Чем ниже качество используемой оптики, тем больше цветовых искажений наблюдается на снимках (рис. 2.1) [2].

Рисунок 2.1 – Хроматическая аберрация на границе контрастных сред
Для минимизации этого вида искажений были созданы специальные ахроматические линзы, состоящие из двух различных сортов стекла[2].
Помимо цветовых аберраций существуют также геометрические аберрации, которые оказывают большое влияние на конечный результат фотосъемки.
Искажение, при котором точки объекта, расположенные за пределами оптической оси, на снимке отображаются в виде затемнений или линий, называется астигматизмом (рис. 2.2)[2].

Рисунок 2.2– Астигматизм в фотографии
Дифракция – это оптический эффект, ограничивающий детальность снимка вне зависимости от установленного разрешения изображения. Причиной его возникновения является рассеивание светового потока при прохождении через диафрагму (рис. 2.3)[2].

Рисунок 2.3 – Дифракция лазерного луча
Если контуры объектов на фотографии имеют неестественно вогнутую или выпуклую форму, и это не является художественным замыслом, такой вид геометрической аберрации называется дисторсией[2].
Дисторсия возникает в результате того, что линейное увеличение разных частей изображения различно[2].
Характерный пример искажений, даваемых системой, обладающей дисторсией, – приведённое на рисунке 2.4 изображение квадрата. Слева изображена подушкообразная, или положительная, дисторсия, справа – бочкообразная, или отрицательная дисторсия [3].

Рисунок 2.4 – Виды дисторсии
Дисторсия, в отличие от хроматической аберрации и астигматизма не нарушает резкости изображения.
Все вышеуказанные искажения могут оказаться полезными в художественной фотографии. Однако когда речь идет о фотограмметрической или геодезической съемке, они недопустимы. В данном случае изображения, подверженные искажениям, подлежат коррекции.
3. Общие сведения о калибровке цифровой фотокамеры
При фотограмметрической обработке снимков требуется знание элементов внутреннего ориентирования (ЭВО) камеры и данных о дисторсии, которая в камерах, не предназначенных для измерительных целей, может достигать заметных величин. Поскольку паспортные данные таких сведении не содержат возникает необходимость в калибровке камер[4].
Калибровка камеры – это задача получения внутренних и внешних параметров камеры по имеющимся фотографиям, отснятым ей [5].
В основу технологии калибровки положен принцип совместного определения элементов внутреннего и внешнего ориентирования камеры и поправок за несовпадение проекции изображения, полученного камерой, и центральной проекции[6].
Все подходы к решению задачи калибровки современных бытовых камер можно разделить на две основные группы: методы самокалибровки и методы непосредственно калибровки[7]. К последним можно отнести метод лабораторной калибровки с использованием специальных технических средств и метод калибровки с помощью тестового полигона.
Сущность метода самокалибровки заключается не в калибровке как таковой, т. е. сравнении эталонных и реальных параметров, а в аналитическом учете искажений. В процессе самокалибровки одновременно определяются поправки к приближенным элементам внешнего ориентирования, координатам точек местности, элементам внутреннего ориентирования и суммарные поправки к координатам точек за влияние всех источников систематических ошибок [8].
Преимущество данного метода перед методом испытательного полигона состоит в том, что он не требует специального полигона, дополнительных измерений [8].
Основная проблема метода самокалибровки – невозможность подбора универсальной аппроксимирующей функции не только для снимков, сделанных различными аппаратами, но и, порой, для снимков, сделанных конкретной съемочной системой [7].
Более эффективным и надежным является способ калибровки по классической схеме с использованием тестового калибровочного полигона.
4. Калибровка камеры мобильного телефона на тестовом полигоне
Калиброванный полигон представляет собой набор точек с трехмерными координатами. Так как изменение третьей координаты происходит в небольшом диапазоне, полигон относится к плоским. Полигон закреплен на стене аудитории 2.339 кафедры геоинформатики и геодезии ДонНТУ. Схематически полигон и его система координат представлены на рисунке 4.1 [9].
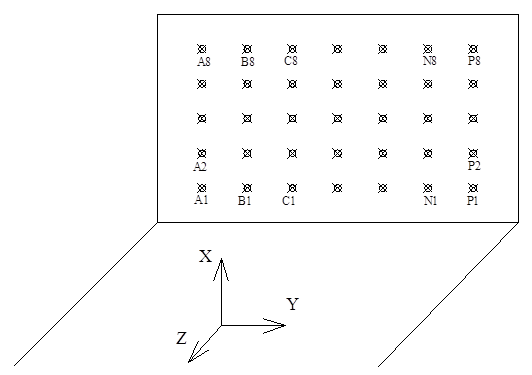
Рисунок 4.1 – Схема тестового полигона
Размер шага полигона по вертикали и горизонтали составляет около 0.4 м. Полигон имеет восемь рядов по четырнадцать марок в каждом ряду. Максимальная дальность фотографирования для данного полигона составляет 14 метров [9].
Последовательность калибровки камеры мобильного телефона на тестовом полигоне:
- Вычисление приблизительного фокусного расстояния тестируемой камеры по снимку;
- Съемка тестового полигона (рис. 4.2);
- Обработка результатов съемки;
- Уравнивание результатов измерений;
- Оценка точности полученных результатов.
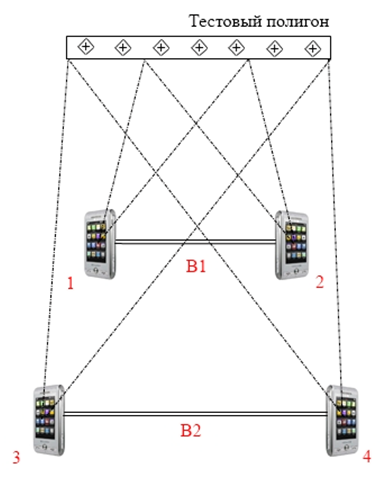
Рисунок 4.2 – Схема фотографирования тестового полигона
Для калибровки был взят мобильный телефон LG gx-500 с разрешением матрицы 3.0 Мп (рис. 4.3).

Рисунок 4.3 – Мобильный телефон LG gx-500
Камера данного телефона оснащена автофокусировкой. Максимальное разрешение снимка составляет 2048х1536 пикселя.
Для фотографирования полигона был избран конвергентный случай со 100% перекрытием снимков стереопары. В результате фотографирования были получены две стереопары (рис. 4.4, 4.5) из различных по дальности от тестового полигона базисов фотографирования – B1 и B2 (2.4 м и 2.92 м соответственно).

Рисунок 4.4 – Снимки с базиса B1 (положения 1 и 2)

Рисунок 4.5 – Снимки с базиса B2 (положения 3 и 4)
Съемка проводилась со штатива, с применением таймера автоспуска для минимизации искажений на снимке, вызванных смещением изображения. Фотографирование выполнялось без вспышки, при дневном свете.
Полученные снимки были обработаны в программе DipEdit/Digitals, а именно была настроена контрастность снимков, установлен размер пикселя – 10 мкм и выполнено преобразование снимков в формат TIF.
Для дальнейшей работы в программе Камера/Digitals были сформированы паспортные данные камеры мобильного телефона LG gx-500 и создан маршрут съемки для каждой стереопары в программе Блок/Digitals.
Дальнейшая обработка маршрутов выполнялась в программе Триангуляция/Digitals.
Уравнивание результатов измерений было проведено в программе аналитической фототрианугляции BlockMSG. Результатом расчета являются параметры систематических ошибок (20 коэффициентов) и значение фокусного расстояния [9].
Результатом корректного расчета можно считать тот, у которого значение ошибки единицы веса не превышает 1 мм, а значение средних отклонений на опорных точках не превышает 2 мм в плане и по высоте [9].
Для того, чтобы проанализировать поле искажений, которое удалось элиминировать, с помощью найденных коэффициентов систематических погрешностей были построены соответствующие поверхности. Для их построения используем указанные ниже полиномы для оси X и Y [9].
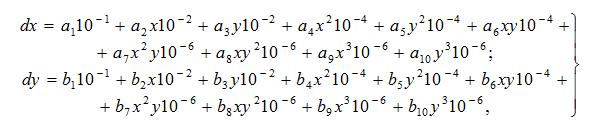
где ![]() коэффициенты дисторсии с 1 по 10 (протокол уравнивания);
коэффициенты дисторсии с 1 по 10 (протокол уравнивания);
![]() коэффициенты дисторсии с 11 по 20 (протокол уравнивания).
коэффициенты дисторсии с 11 по 20 (протокол уравнивания).
Найденные величины (их сумма,) будут использоваться как третья координата для поверхности, а как плановые координаты можно использовать измеренные фотокоординаты одного из снимков. Построенная в Surfer поверхность представлена на рисунке 4.6.
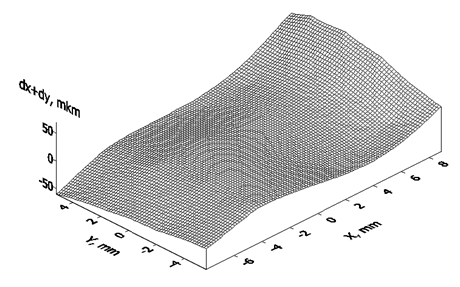
Рисунок 4.6 – Поверхность систематических ошибок
Максимальное значение систематических ошибок составляет 70 мкм. Но несмотря на то, что эта величина небольшая, поверхность имеет систематический характер.
Выводы
В рамках данной работы были выполнены следующие этапы:
- Определение фокусного расстояния фотокамеры мобильного телефона LG gx-500;
- Фотографирование тестового полигона камерой мобильного телефона LG gx-500 с целью дальнейшей калибровки;
- Измерение цифровых изображений;
- Выполнение уравнивания результатов измерений.
В результате выполненных исследований было найдено уравненное значение фокусного расстояния камеры мобильного телефона LG gx-500, оно составляет 18.940 мм. Найдены также коэффициенты систематических ошибок (табл. 1).
Таблица 1 – Коэффициенты систематических ошибок
| № | По оси Х | По оси Y |
| 1 | 0 | 0 |
| 2 | -0.17827 | 0 |
| 3 | -0.04818 | -0,17827 |
| 4 | 0 | 0,04791 |
| 5 | -0.75026 | -4,67854 |
| 6 | 0 | 4,25962 |
| 7 | -19.45016 | 43,97805 |
| 8 | -20.50076 | -35,54581 |
| 9 | 110.25466 | 3,06295 |
| 10 | 1.93653 | -41,1906 |
В результате проведения калибровки камеры мобильного телефона LG gx-500 было установлено, что применение камеры мобильного телефона в измерительных целях невозможно, так как значение систематических ошибок в подобных камерах достигают значительных величин, а полученные снимки не обладают достаточным для проведения достоверных измерений уровнем детализации.
В ходе дальнейшей работы будет проведена калибровка камер еще двух различных мобильных телефонов.
Перечень ссылок
- Фотограмметрия (конспект лекций) / Корнилов Ю.Н. – Санкт-Петербург, 2006 – 172 с.
- Цифровая фотография для всех [Электронный ресурс].15.02.2013.Режим доступа: http://www.photoforall.ru
- Справочник ЖКХ. Дисторсия [Электронный ресурс].15.02.2013.Режим доступа: http://gkh-topograph.narod.ru/distorsio.htm
- Лабораторная калибровка цифровых камер с большой дисторсией [Электронный ресурс].17.02.2013.Режим доступа: http://www.stereo-pixel.ru/docs/pressa/2/kalibr.htm – Р.Н. Гельман, А.Л. Дунц
- Википедия [Электронный ресурс].12.02.2013.Режим доступа: http://ru.wikipedia.org/wiki
- Фотограмметрия [Электронный ресурс].17.02.2013.Режим доступа: http://photogrammetria.ru
- Международный научно-технический и производственный электронный журнал "Науки о Земле" №01-2011 от 14.08.2011 г. / под ред. Докукина П.А. – ООО «ГеоДозор» – 110 с.
- Методы учета систематических искажения аэроснимка. Самокалибровка [Электронный ресурс].20.02.2013.Режим доступа: http://www.masters.donntu.ru – Курков В.М.
- Методические указания к самостоятельной работе студентов по дисциплинам «Фотограмметрия и дистанционное зондирование»на тему «Калибровка цифровой камеры на основании снимков испытательного полигона»/ А.А. Шоломицкий, А.А. Лунев – Донецк, ДонНТУ, 2010, – 22 с.
- Конструктивная калибровка цифровой камеры / С.Г. Могильный, д-р техн.наук, проф., А.А. Шоломицкий, д-р техн.наук, проф., А.А. Лунев, канд.техн.наук, доц. (Донецький национальный технический университет).
- Brown, D.C., 1966. Decentering distortion of lenses. Photogrammetric Engineering, 32(3): 444-462.
- Brown, D.C., 1972. Calibration of close-range cameras. International Archives of Photogrammetry and Remote Sensing, 19(5) unbound paper: 26 pages, ISP Congress, Ottawa
- Brown, D., 1989. A strategy for multi-camera on-the-job self-calibration. Institut Fur Photogrammetrrie Stuttgart, Festschrift, Friedrich Ackermann, zum 60. Geburtstag. 13 pages.
- Ziemann, H. & El Hakim, S.F., 1982. On the definition of lens distortion reference data with odd power polynomials. The International Archives of Photogrammetry, 24(1): 123-130.
- Ziemann, H., 1986. Thoughts on a standard algorithm for camera calibration. Progress in Imaging Sensors, Proc. ISPRS Symposium, Stuttgart, : 41-48.
- Shortis, M.R. Snow, W.L. Goad, W.K., 1995. Comparative geometric tests of industrial and scientific CCD cameras using plumb line and test range calibrations. International Archives of Photogrammetry and Remote Sensing, 30(5W1): 53-59.