





Реферат
Зміст
- Вступ
- 1. Елементи орієнтування знімка
- 2. Спотворення, що виникають при фотозйомці
- 3. Загальні відомості про калібрування цифрової фотокамери
- 4. Калібровка камери мобільного телефону на тестовому полігоні
- Висновки
- Перелік посилань
Вступ
Ліберальна цінова політика на ринку портативних пристроїв зв'язку в поєднанні з їх багатофункціональністю зробили мобільні телефони дуже популярними серед широких верств населення. Однак дані пристрої, спочатку призначені для побутового використання, можуть застосовуватися і в інших сферах діяльності.
Сучасний мобільний телефон, оснащений цифровою фотокамерою дозволяє не тільки отримати кольорове зображення досить високої якості, але і виконати обмін файлами пристрою з комп'ютером або іншим портативним пристроєм як бездротової мережі, так і через кабельне підключення. Це дає змогу припускати, що отримані знімки можна використовувати як вихідний матеріал для вимірювання різних об'єктів дистанційним методом. Однак, слід розуміти, що ідеальною оптичної системи, що не дає ніяких аберації, не існує. А в камерах, не призначених для вимірювальних цілей, їх значення може досягати значних величин. Мінімізувати спотворення можна, здійснивши калібрування використовуваної камери.
Сьогодні питанню калібровки неметричних цифрових камер приділяється підвищена увага, є велика кількість публікацій, присвячених даній темі. Авторами робіт пропонуються різні підходи до виконання калібрування малоформатних камер. Однак запропоновані підходи не завжди є економічно виправданими і фізично здійсненними, особливо тоді, коли мова йде про камеру мобільного телефону. До того ж, на сьогоднішній науково не встановлено, чи застосовні камери мобільних телефонів для вимірювальних цілей.
Метою даної магістерської роботи є дослідження можливості практичного застосування калібрування камер мобільних тедефонов для подальшого їх використання у вимірювальних цілях. Для цього необхідно визначити елементи орієнтування знімків, зроблених випробуваної камерою, що є основною науковою задачею даної роботи. На основі отриманих результатів можна буде зробити висновок про те, чи можливо застосовувати камеру мобільного телефону для вимірювальних цілей.
Об'єктом дослідження є фотокамера мобільного телефону, предметом – спотворення оптичної системи камери мобільного телефону.
Калібрування камери буде здійснюватися з використанням калібрувального полігону.
1. Елементи орієнтування знімка
Елементами орієнтування знімка називаються величини, що визначають його положення в момент фотографування щодо обраної просторової прямокутної системи координат. Розрізняють елементи внутрішнього і зовнішнього орієнтування знімка [1].
Елементи внутрішнього орієнтування дозволяють знайти положення центру проекції щодо знімка, а значить відновити в'язку проектують променів, що існувала в момент фотографування. До них відносяться координати головної точки x0, y0 знімка і фокусна відстань f фотокамери (мал.1.1) [1].

Малюнок 1.1 – Елементи внутрішнього орієнтування знімка
Елементи зовнішнього орієнтування (ЕЗО) дозволяють встановити положення знімка (зв'язки), яке він посідав у момент фотографування щодо заданої просторової прямокутної системи координат [1].
Розрізняють абсолютні і відносні ЕЗО знімка. Абсолютні елементи визначають положення зв'язки в геодезичній системі координат[1].
Таким чином, положення одиночного знімка визначається дев'ятьма елементами орієнтування, з них три – елементи внутрішнього орієнтування і шість – елементи зовнішнього орієнтування[1].
2. Спотворення, що виникають при фотозйомці
Спотворення знімків, сформовані системою оптики при фотозйомці називають аберацією. Залежно від природи походження аберації бувають хроматичними і геометричними. Причиною виникнення хроматичних (тобто колірних) аберацій є "неідеальність" оптики фотоапаратів. Фактично цей вид спотворення можна назвати властивістю об'єктива. Чим нижча якість використовуваної оптики, тим більше колірних спотворень спостерігається на знімках (мал. 2.1) [2].

Малюнок 2.1 – Хроматична аберація на межі контрастних середовищ
Для мінімізації цього виду спотворень були створені спеціальні ахроматичні лінзи, які з двох різних сортів скла[2].
Крім колірних аберацій існують також геометричні аберації, які мають вплив на кінцевий результат фотозйомки.
Спотворення, при якому точки об'єкта, розташовані за межами оптичної осі, на знімку відображаються у вигляді затемнень або ліній, називається астигматизмом (мал. 2.2)[2].

Малюнок 2.2-Астигматизм у фотографії
Дифракція – це оптичний ефект, що обмежує детальність знімка незалежно від встановленого дозволу зображення. Причиною його виникнення є розсіювання світлового потоку при проходженні через діафрагму (малі 2.3)[2].

Малюнок 2.3 – Дифракція лазерного променя
Якщо контури об'єктів на фотографії мають неприродно увігнуту або опуклу форму, і це не є художнім задумом, такий вид геометричної аберації називається дісторсией[2].
дисторсія виникає в результаті того, що лінійне збільшення різних частин зображення різне[2].
Характерний приклад спотворень, що даються системою, що спотворені дисторсією, – приведений на малюнку 2.4 зображення квадрата. Зліва зображена подушкоподібна або позитивна, дисторсія, праворуч – бочкоподібна, або від'ємна дисторсія [3].

Малюнок 2.4 – Види дісторсії
Дисторсія, на відміну від хроматичної аберації і астигматизму чи не порушує різкості зображення.
Усі вищевказані викривлення можуть виявитися корисними в художній фотографії. Однак коли мова йде про фотограмметричної або геодезичної зйомки, вони неприпустимі. У даному випадку зображення, що мають спотворення, підлягають корекції.
3. Загальні відомості про калібрування цифрової фотокамери
Для фотограмметричної обробки знімків потрібне знання елементів внутрішнього орієнтування (ЕВО) камери і даних про дисторсію, яка в камерах, не призначених для вимірювальних цілей, може досягати помітних величин. Оскільки паспортні дані таких зведенні не містять виникає необхідність в калібрування камер[4].
Калібровка камери – це завдання отримання внутрішніх та зовнішніх параметрів камери за наявними фотознімків, зроблених їй [5].
В основу технології калібрування покладено принцип спільного визначення елементів внутрішнього і зовнішнього орієнтування камери і поправок за розбіжність проекції зображення, отриманого камерою, і центральної проекції[6].
Всі підходи до вирішення завдання калібрування сучасних побутових камер можна розділити на дві основні групи: методи самокалібрування і методи безпосередньо калібрування [7]. До останніх можна віднести метод лабораторної калібрування з використанням спеціальних технічних засобів і метод калібрування за допомогою тестового полігону.
Сутність методу самокалібрування полягає не у калібровці як такої, тобто порівнянні еталонних і реальних параметрів, а в аналітичному обліку спотворень. У процесі самокалібрування одночасно визначаються поправки до наближених елементам зовнішнього орієнтування, координатам точок місцевості, елементам внутрішнього орієнтування та сумарні поправки до координат точок за вплив усіх джерел систематичних помилок [8].
Перевага даного методу перед методом випробувального полігону полягає в тому, що він не вимагає спеціального полігону, додаткових вимірів [8].
Основна проблема методу самокалібрування – неможливість підбору універсальної апроксимуючої функції не тільки для знімків, зроблених різними апаратами, але й, часом, для знімків, зроблених конкретної знімальної системою[7].
Більш ефективним і надійним є спосіб калібрування за класичною схемою з використанням тестового калібрувального полігону.
4. Калібровка камери мобільного телефону на тестовому полігоні
Калібрований полігон являє собою набір точок з тривимірними координатами. Так як зміна третьої координати відбувається в невеликому діапазоні, полігон належить до плоским. Полігон закріплений на стіні аудиторії 2.339 кафедри геоінформатики та геодезії ДонНТУ. Схематично полігон і його система координат представлені на малюнку 4.1[9].
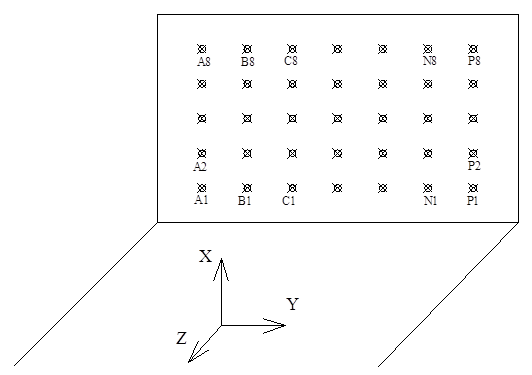
Малюнок 4.1 – Схема тестового полігону
Розмір кроку полігону по вертикалі і горизонталі складає близько 0.4 м. Полігон має вісім рядів по чотирнадцять марок у кожному ряду. Максимальна дальність фотографування для даного полігону складає 14 метрів[9].
Послідовність калібрування камери мобільного телефону на тестовому полігоні:
- Обчислення приблизного фокусної відстані тестованої камери по знімку;
- Зйомка тестового полігону (мал. 4.2);
- Обробка результатів зйомки;
- Зрівняння результатів вимірювань;
- Оцінка точності отриманих результатів.
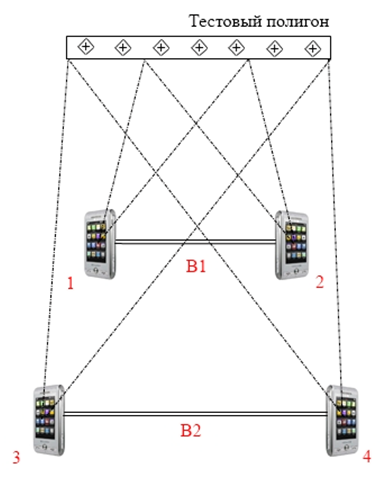
Малюнок 4.2 – Схема фотографування тестового полігону
Для калібрування був узятий мобільний телефон LG gx-500 з дозволом матриці 3.0 Мп (мал. 4.3).

Малюнок 4.3 – Мобільний телефон LG gx-500
Камера даного телефону оснащена автофокусом. Максимальна роздільна здатність знімка складає 2048х1536 пікселів.
Для фотографування полігону був обраний конвергентний випадок зі 100% перекриттям знімків стереопари. В результаті фотографування були отримані дві стереопари (мал. 4.4, 4.5) з різних по дальності від тестового полігону базисів фотографування – В1 і В2 (2.4 м і 2.92 м відповідно).

Малюнок 4.4 – Знімки з базису B1 (положення 1 і 2)

Малюнок 4.5 – Знімки з базису B2 (положення 3 і 4)
Зйомка проводилася з штатива, із застосуванням таймера автоспуску для мінімізації спотворень на знімку, викликаних зсувом зображення. Фотографування виконувалося без спалаху, при денному світлі.
Отримані знімки були оброблені в програмі DipEdit/Digitals, а саме була налаштована контрастність знімків, встановлений розмір пікселя – 10 мкм і виконано перетворення знімків у форматі TIF.
Для подальшої роботи в програмі Камера/Digitals були сформовані паспортні дані камери мобільного телефону LG gx-500 і створений маршрут зйомки для кожної стереопари у програмі Блок/Digitals.
Подальша обробка маршрутів виконувалася в програмі Триангуляция/Digitals.
Зрівняння результатів вимірювань було проведено в програмі аналітичної фототрианугляции BlockMSG. Результатом розрахунку є параметри систематичних помилок (20 коефіцієнтів) і значення фокусної відстані[9].
Результатом коректного розрахунку можна вважати той, у якого значення помилки одиниці ваги не перевищує 1 мм, а значення середніх відхилень на опорних точках не перевищує 2 мм в плані та по висоті [9].
Для того, щоб проаналізувати поле спотворень, яке вдалося елімінувати, за допомогою знайдених коефіцієнтів систематичних похибок були побудовані відповідні поверхні. Для їх побудови використовуємо вказані нижче поліноми для осі X і Y [9].
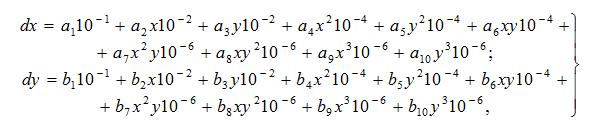
де ![]() коефіцієнти дисторсії з 1 по 10 (протокол зрівнювання);
коефіцієнти дисторсії з 1 по 10 (протокол зрівнювання);
![]() коефіцієнти дисторсії з 11 по 20 (протокол зрівнювання).
коефіцієнти дисторсії з 11 по 20 (протокол зрівнювання).
Знайдені величини (їх сума,) використовуватимуться як третя координата для поверхні, а як планові координати можна використовувати виміряні фотокоордінати одного зі знімків. Побудована в Surfer поверхню представлена ??на малюнку 4.6.
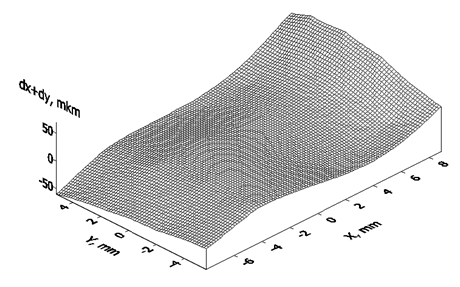
Малюнок 4.6 – Поверхня систематичних помилок
Максимальне значення систематичних помилок становить 70 мкм. Але незважаючи на те, що ця величина невелика, поверхня має систематичний характер.
Висновки
У рамках даної роботи були виконані наступні етапи:
- Визначення фокусної відстані фотокамери мобільного телефону LG gx-500;
- Фотографування тестового полігону камерою мобільного телефону LG gx-500 з метою подальшої калібрування;
- Вимірювання цифрових зображень;
- Виконання зрівнювання результатів вимірювань.
У результаті виконаних досліджень було знайдено рівняння значення фокусної відстані камери мобільного телефону LG gx-500, воно становить 18.940 мм. Знайдено також коефіцієнти систематичних помилок (табл. 1).
Таблиця 1 – Коефіцієнти систематичних помилок
| № | По осі Х | По осі Y |
| 1 | 0 | 0 |
| 2 | -0.17827 | 0 |
| 3 | -0.04818 | -0,17827 |
| 4 | 0 | 0,04791 |
| 5 | -0.75026 | -4,67854 |
| 6 | 0 | 4,25962 |
| 7 | -19.45016 | 43,97805 |
| 8 | -20.50076 | -35,54581 |
| 9 | 110.25466 | 3,06295 |
| 10 | 1.93653 | -41,1906 |
У результаті проведення калібрування камери мобільного телефону LG gx-500 було встановлено, що застосування камери мобільного телефону в вимірювальних цілях неможливо, так як значення систематичних помилок у подібних камерах досягають значних величин, а отримані знімки не володіють достатнім для проведення достовірних вимірювань рівнем деталізації.
У ході подальшої роботи буде проведена калібровка камер ще двох різних мобільних телефонів.
Перелік посилань
- Фотограмметрия (конспект лекций) / Корнилов Ю.Н. – Санкт-Петербург, 2006 – 172 с.
- Цифровая фотография для всех [Электронный ресурс].15.02.2013.Режим доступа: http://www.photoforall.ru
- Справочник ЖКХ. Дисторсия [Электронный ресурс].15.02.2013.Режим доступа: http://gkh-topograph.narod.ru/distorsio.htm
- Лабораторная калибровка цифровых камер с большой дисторсией [Электронный ресурс].17.02.2013.Режим доступа: http://www.stereo-pixel.ru/docs/pressa/2/kalibr.htm – Р.Н. Гельман, А.Л. Дунц
- Википедия [Электронный ресурс].12.02.2013.Режим доступа: http://ru.wikipedia.org/wiki
- Фотограмметрия [Электронный ресурс].17.02.2013.Режим доступа: http://photogrammetria.ru
- Международный научно-технический и производственный электронный журнал "Науки о Земле" №01-2011 от 14.08.2011 г. / под ред. Докукина П.А. – ООО «ГеоДозор» – 110 с.
- Методы учета систематических искажения аэроснимка. Самокалибровка [Электронный ресурс].20.02.2013.Режим доступа: http://www.masters.donntu.ru – Курков В.М.
- Методические указания к самостоятельной работе студентов по дисциплинам «Фотограмметрия и дистанционное зондирование»на тему «Калибровка цифровой камеры на основании снимков испытательного полигона»/ А.А. Шоломицкий, А.А. Лунев – Донецк, ДонНТУ, 2010, – 22 с.
- Конструктивная калибровка цифровой камеры / С.Г. Могильный, д-р техн.наук, проф., А.А. Шоломицкий, д-р техн.наук, проф., А.А. Лунев, канд.техн.наук, доц. (Донецький национальный технический университет).
- Brown, D.C., 1966. Decentering distortion of lenses. Photogrammetric Engineering, 32(3): 444-462.
- Brown, D.C., 1972. Calibration of close-range cameras. International Archives of Photogrammetry and Remote Sensing, 19(5) unbound paper: 26 pages, ISP Congress, Ottawa
- Brown, D., 1989. A strategy for multi-camera on-the-job self-calibration. Institut Fur Photogrammetrrie Stuttgart, Festschrift, Friedrich Ackermann, zum 60. Geburtstag. 13 pages.
- Ziemann, H. & El Hakim, S.F., 1982. On the definition of lens distortion reference data with odd power polynomials. The International Archives of Photogrammetry, 24(1): 123-130.
- Ziemann, H., 1986. Thoughts on a standard algorithm for camera calibration. Progress in Imaging Sensors, Proc. ISPRS Symposium, Stuttgart, : 41-48.
- Shortis, M.R. Snow, W.L. Goad, W.K., 1995. Comparative geometric tests of industrial and scientific CCD cameras using plumb line and test range calibrations. International Archives of Photogrammetry and Remote Sensing, 30(5W1): 53-59.