
Cистема автоматичного управління вітроенергетичної установкою
Зміст
- Вступ
- 1. Цілі і завдання розробки САУ
- 2. Аналіз стану питання автоматизації вітроенергетичної установкою
- 2.1. Опис технологічної схеми отримання електричної енергії за допомогою вітроенергетичних станцій
- 2.2. Технологічна схема ВЕУ
- 2.3. Вітроенергетична станція як об'єкта управління
- 3. Розробка функціональної схеми системи автоматичного керування
- 4. Вибір технічних засобів системи управління
- 4.1. Датчик кута повороту і швидкості повороту лопатей
- 4.2. Датчик кутової швидкості генератора
- 4.3. Датчик швидкості і напряму вітру
- 4.4. Модулі вводу/виводу
- 4.5. Блок живлення
- 4.6. Програмований логічний контролер
- 5. Моделювання роботи системи та синтез регулятора
- 5.1. Моделювання роботи системи
- 5.2. Синтез регулятора для СУ ВЕУ
- 5.2.1. Пропорцiйний регулятор
- 5.2.2. Пропорцiйно-iнтегруючий регулятор
- Висновки
- Перелiк посилань
Вступ
Вітрова енергетика – це отримання механічної енергії від вітру з подальшим перетворенням її в електричну. Вітрогенератор (вітроелектрична установка або скорочено ВЕУ) цей пристрій для перетворення кінетичної енергії вітру в електричну для подальшого використання. Сьогодні вітрогенератори - високотехнологічний виріб потужністю від 5 кВт до 4500 кВт одиничної потужності.
У всьому світі спостерігається бурхливий розвиток вітроенергетичної галузі, обумовлене, перш за все, введенням різних пільг для девелоперів альтернативної енергетики, а також прийняттям так званих зелених
тарифів на електроенергію, отриману з використанням ВЕУ, які є одними з найвищих в Європі. Зокрема, для вітроустановок потужністю понад 2 МВт величина зеленого
тарифу становить близько 11,3 євроцента за 1 кВт/год. Встановлені зелені
тарифи будуть діяти до 2030 року.
Вітрогенератори можна розділити на дві категорії: промислові вітрогенератори і домашні вітрогенератори для приватного користування. Часто, їх об'єднують в мережі, в результаті чого виходить вітряна електростанція. Єдине важлива вимога для ВЕС – високий середньорічний рівень вітру. При цьому підвищити ефективність вироботка електричної енергії можливо регулюванням кута повороту лопатей навколо осі маха для забезпечення підтримання сталості кутової швидкості ротора в умовах зміни швидкості та напрямку вітру, а також навантаження.
Проектування систем управління ґрунтується на вимозі забезпечити надійну і економічну роботу вітроелектроустановок. Ухвалення проектних рішень, як правило, виконується на основі типових, вже наявних проектів, але наука і техніка постійно розвиваються. Створюються нові, більш досконалі алгоритми управління і апаратні рішення. [1]
1. Цілі і завдання розробки
Мета – впровадження САУ вітроенергетичної установкою дозволить підвищити потужність вітрогенератора, за рахунок вдосконалення системи управління кутом повороту лопатей вітроенергетичної установки при зміні швидкості і напряму вітру.
Призначення розробки – основними повноваженнями САУ, повинні бути функції:
- автоматичне керування кутом повороту лопатей вітроенергетичної установки;
- компенсація впливу зміни швидкості і напрямку вітру на потужність вітроенергетичної установки;
- забезпечення взаємодії з оперативним і обслуговуючим персоналом.
2. Аналіз стану питання автоматизації вітроенергетичної установкою
2.1. Опис технологічної схеми отримання електричної енергії за допомогою вітроенергетичних станцій
Повітряні потоки у поверхні Землі або моря є ламінарними – нижні шари гальмують розташовані вище. Цей ефект помітний до висоти 1 км, але різко знижується вже на висотах більше 100 м. Висота розташування генератора вище цього прикордонного шару одночасно дозволяє збільшити діаметр лопатей і звільняє площі на землі для іншої діяльності. Вітрогенератор починає виробляти струм при вітрі 3 м/с і відключається при вітрі більше 25 м/с. Максимальна потужність досягається при вітрі 15 м/с. [2]
Потужність вітрогенератора залежить від потужності повітряного потоку (N), яка визначається швидкістю вітру і захоплюваної площею
N=pSV3/2,
де V – швидкість вітру;
p – щільність повітря;
S – ометаєма площа.
Не можна оцінювати енергію вітру, що не провівши ретельного вимірювання його швидкості, характерною для даної місцевості. Так для Донецької області середня швидкість вітру складає 4,5-5 м/с (рис. 2.1).[3]

Рисунок 2.1 – Швидкість вітру в Донбасі
Крім значення середньої швидкості вітру існує ще ряд параметрів, необхідних для визначення вітрового потенціалу. Значення деяких: максимальна швидкість вітру, кількість послідовних днів, коли швидкість вітру перевищує 5 м/с; тривалість періодів затишності або постійного вітру (рис. 2.2).
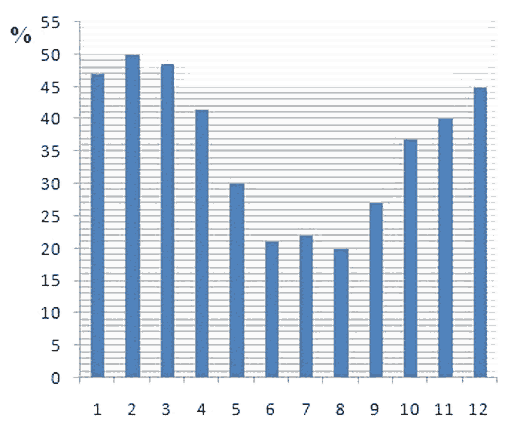
Рисунок 2.2 – Частина вітрів, придатних для потреб вітроенергетики по місяцях (Донецька область)
З малюнка 2.2 видно, що Донецька область має необхідний вітровим потенціалом для будівництва вітроенергетичних установок, що підтверджується даними за кількістю встановлених вітроенергетичних потужностей в Донецькій області – 88,3 МВт (2013).
Найбільш поширені вітряні електростанції складаються з генератора, хвостової частини, щогли, контролера, інвертора і акумуляторної батареї. Сила вітру обертає колесо з лопатями, передаючи крутний момент через редуктор на вал генератора. Крім безпосередньо вітрогенератора, установка включає:
- контролер: перетворить змінний струм, який виробляється генератором в постійний для заряду акумуляторних батарей;
- акумуляторні батареї: служать для накопичення електроенергії і подальшого її використання енергосистемою в безвітряні години. Також вони вирівнюють і стабілізують вихідна напруга з генератора;
- анемоскоп і датчик напряму вітру: відповідають за збір даних про швидкість і напрям вітру в установках середньої і великої потужності;
- автоматичний перемикач джерела живлення (АВР): робить автоматичне перемикання між декількома джерелами електроживлення за проміжок в 0,5 с при зникненні основного джерела;
- інвертор: перетворює струм з постійного, який накопичується в акумуляторних батареях, в змінний, який споживає більшість електроприладів.
2.2. Технологічна схема ВЕУ
Існує два основні класи вітроенергетичних установок (ВЕУ):
- горизонтально-пропелерні;
- вертикально-осьові.
Сьогодні багато країн експлуатують вертикально-осьові вітроустановки з криволінійними лопатями ротора Дарині (США, Канада, Нідерланди) або Н-ротором (Великобританія, Україна, Румунія). Ефективність роботи вертикально-осьових вітроустановок принципово не залежить від напрямку вітру. Тому для них відпадає необхідність в системах і механізмах орієнтації на вітер.
Найбільша ефективність горизонтально-пропелерних ВЕУ досягається тільки за умови забезпечення стійкості коллінеарності осі вітроколеса і напрямку вітру. При цьому необхідність орієнтації на вітер вимагає наявності в конструкціях ВЕУ спеціальних механізмів і систем управління для безперервного спостереження за вітрової обстановкою.
Вважається, що найбільш перспективними є горизонтально-пропелерні ВЕУ з можливістю регулювання кута повороту лопатей навколо осі маха для забезпечення підтримання сталості кутової швидкості ротора в умовах зміни швидкості та напрямку вітру, а також навантаження.
Як об'єкт досліджень виберемо горизонтально-пропелерну ВЕУ з можливістю регулювання кута повороту лопатей ротора.
Схема пристрою сучасної горизонтально-пропелерної ВЕУ з можливістю регулювання кута повороту лопатей ротора наведені на рис. 2.3.
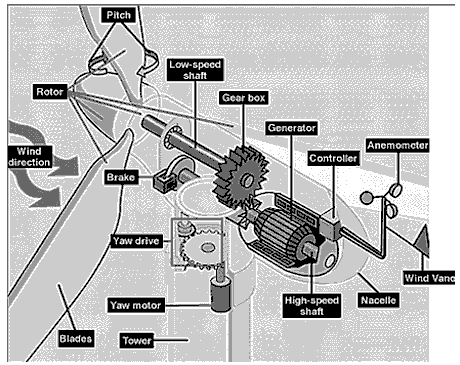
Рисунок 2.3 – Технологічна схема вітряної установки
2.3. Вітроенергетична станція як об'єкта управління
Кількість енергії, виробленої за рахунок вітру, залежить від:
1. Щільності повітря.
Щільність залежить від кількості молекул в одиниці об'єму. При нормальному атмосферному тиску і при температурі 15°С щільність повітря становить 1,225 кг/м3. Однак зі збільшенням вологості щільність повітря злегка зменшується. Через те, що взимку повітря більш щільний, вітрогенератор вироблятиме взимку більше енергії, ніж влітку, при однаковій швидкості вітру. На території, розташованої високо над рівнем моря, наприклад, в горах, атмосферний тиск менше і, відповідно, менше щільність повітря.
2. Площі, охопленої лопатями вітротурбіни при обертанні.
Чим більше площа ротора, тим більше електроенергії він може виробити. Однак, процес збільшення площі ротора можна звести до простого подовження лопатей ВЕУ. Збільшуючи розмір площі, яка охоплюється лопатями при обертанні, збільшується навантаження на систему при тій же швидкості вітру. Для того, щоб система витримала всі навантаження, необхідно посилити всі її механічні компоненти. Стає зрозуміло, що подібне рішення питання потребує додаткових фінансових витрат.
3. Швидкості вітру.
Швидкість вітру є найбільш важливим фактором, що впливає на кількість енергії, яке ВЕУ може перетворити в електроенергію. Велика швидкість вітру збільшує обсяг проходять повітряних мас. Тому зі збільшенням швидкості вітру зростає і кількість електроенергії, виробленої ВЕУ.
Таким чином, з точки зору вхід-вихід, досліджуваний об'єкт регулювання горизонтально-пропелерна ВЕУ з поворотними лопатями можна представити у вигляді послідовного з'єднання відповідних блоків: регулюючого щабля – блоку поворотних лопатей, блоку вироблення сумарного крутного моменту – ротора ВЕУ та блоку електричного генератора (схема наведена на рис. 3.1).
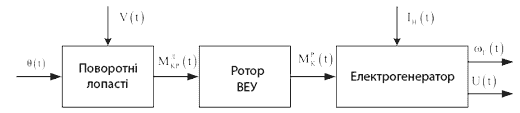
Рисунок 2.4 – Схема матеріальних потоків об'єкта регулювання
На рис. 2.4 прийняті наступні позначення:
- V(t) – швидкість вітру;
- θ(t) – кут повороту лопаті відносно осі маху;
- Мкр(t) – крутящій момент, створюваний лопатою;
- Mcкр(t) – сумарний крутний момент, створюваний ротором ВЕУ;
- ωг(t) – кутова швидкість обертання ротора електрогенератора;
- Iн(t) – струм навантаження електрогенератора;
- U(t) – напруга на виході генератора.
3. Розробка функціональної схеми системи автоматичного керування
Функціональна схема є основним технічним документом, що визначає функціонально-блокову структуру окремих вузлів автоматичного контролю, управління і регулювання технологічного процесу отримання електроенергії за допомогою ветрогнератора і оснащення об'єкта управління приладами і засобами автоматизації.
Функціональна схема розробляється з урахуванням складу і структури функціональних вузлів системи управління виділених на етапі постановки завдання на проектування (рис. 3.1).
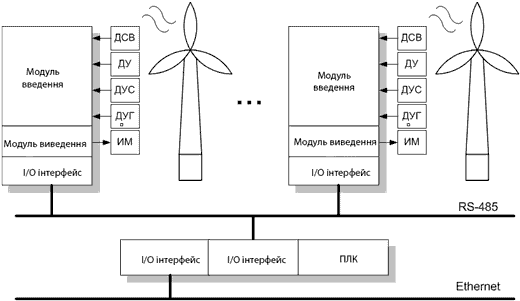
Рисунок 3.1 – Функціональна схема системи автоматичного управління ВЕУ
4. Вибір технічних засобів системи управління
Критерієм вибору технічних засобів системи служить якість, надійність, вартість обладнання, повнота і достатність програмного забезпечення, а також можливість отримання технічних консультацій і навчання у висококваліфікованих фахівців фірми постачальника, і звичайно, гарантійне і післягарантійне обслуговування.
4.1. Датчик кута повороту і швидкості повороту лопатей
Застосуємо датчик T20WN, призначений для вимірювань статичних та динамічних крутних моментів сили та швидкостей обертання або кута повороту (рис. 4.1).
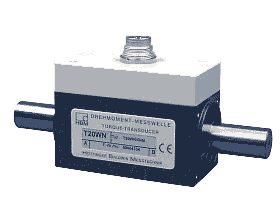
Рисунок 4.1 – Зовнішній вигляд датчика T20WN
4.2. Датчик кутової швидкості генератора
Використовуємо датчик крутного моменту T40FM, призначений для вимірювань статичних та динамічних крутних моментів сили та швидкостей обертання або кута повороту, в широкому діапазоні навантажень.
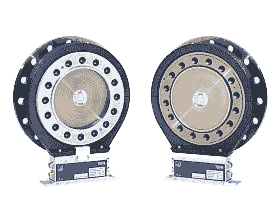
Рисунок 4.2 – Зовнішній вигляд датчика T40FM
4.3. Датчик швидкості і напряму вітру
Датчик швидкості і напряму вітру ДВ-160 призначений для вимірювання швидкості і напряму вітру. Датчик має малу інерційністю і високою чутливістю.
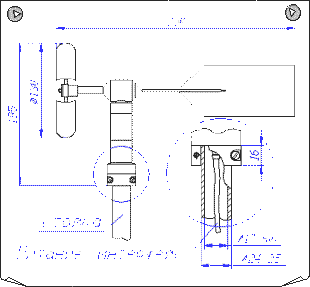
Рисунок 4.3 – Габаритні розміри датчика швидкості вітру ДВ-160
4.4. Модулі вводу/виводу
Для підключення датчика T40FM до системи управління застосуємо модуль віддаленого лічильника імпульсів I-7080 (вимірювання швидкості обертання електрогенератора генератора) і модуль віддаленого аналогового введення I-7017 (вимір крутного моменту) від компанії ICP DAS.
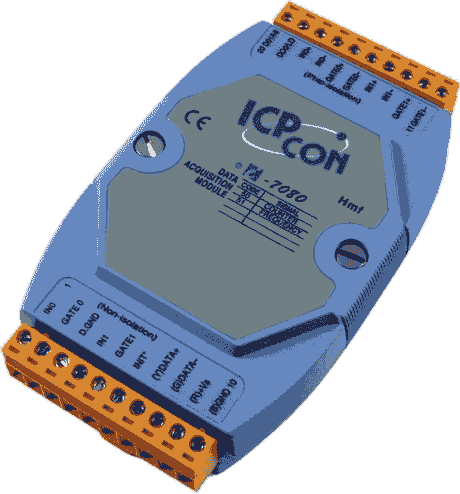
Рисунок 4.4 – Зовнішній вигляд модуля I-7080
4.5. Блок живлення
Для живлення обраних технічних засобів стабільною напругою застосовують блок живлення ОВЕН БП14.
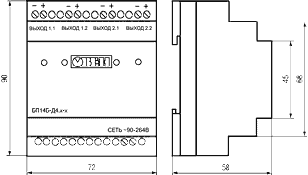
Рисунок 4.5 – Габаритні розміри блока живлення ОВЕН БП14
Багатоканальний блок живлення ОВЕН БП14Б-Д4.4-24 – блок живлення з вихідною потужністю 14 Вт, з діапазоном вхідної напруги 90...264 В змінного струму частотою 47-63 Гц, в корпусі призначеному для кріплення на DIN рейку, харчування стабілізованою напругою 24 В постійного струму по 4 каналам. Максимальний струм навантаження на канал 145 мА.
4.6. Програмований логічний контролер
Як промисловий контролера використовуємо iPAC-8000 – це сімейство програмованих контролерів автоматизації від компанії ICP DAS. Даний контролер поєднує в собі відкритість і функціональність комп'ютера (PC) і надійність програмованого логічного контролера PLC. Контролер iPAC-8000 універсальний і може використовуватися в автоматизації виробництва, автоматизації будівель, нафтохімічної промисловості, в задачах моніторингу та телемеханіки, рішеннях M2M і ін.
iPAC-8000 працює під управлінням операційної системою Mini OS7 має порти Ethernet, RS-232/RS-485 і слоти розширення.
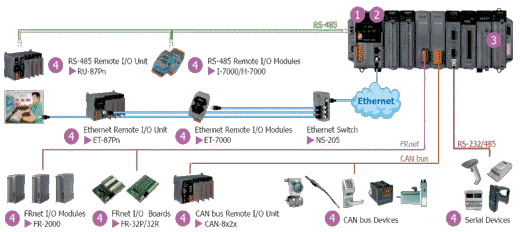
Рисунок 4.6 – Основные компоненты системы PAC-8000
З сімейства контролерів PAC-8000 виберемо IP 8817 PC (рис. 4.6) – сумісний промисловий контролер 80МГц, 512кб Flash, 512кб SRAM, 2xRS232, 1xRS485, 1xRS232/485, 7-сегментний індикатор, Mini OS7, 8 слотів розширення, IsaGRAF.
5. Моделювання роботи системи та синтез регулятора
5.1. Моделювання роботи системи
Моделювати роботу системи, подаючи на вхiд поривчасто змiнний вiтер. Графiк швидкостi вiтру наведено на анимацii.
У якостi регулятора встановимо пропорцiйне звено з коефiцiєнтом пiдсилення KR = 1.Таким чином, побачимо вплив зворотнього зв'язку та додаткових каналiв. Система встановлення куту лопатiв в залежностi вiд швидкостi вiтру вiдпрацювала наступним чином (кадр 2).
Час встановлення нового кута не перевищує 3 с, що є цiлком прийнятним для цього канала регулювання. Додаткових заходiв з форсування управлiння за цим каналом не потрiбно. Але основний вихiдний сигнал – кутова швидкiсть генератора вiтроустановки ω(t) дуже сильно змiнюється в залежностi вiд швидкостi вiтру. Графiк змiни швидкостi наведено на кадрi 3.
Це цiлком не прийнятно, тому потрiбен синтез регулятора, який забезпечить постiйну швидкiсть при змiнах вiтру.
Анимацiя – Графiки залежностей (анимацiя: 5 кадрiв с iз затримкою 5 секунд мiж ними, кiлькiсть циклiв повторення – 7)
5.2. Синтез регулятора для СУ ВЕУ
5.2.1. Пропорцiйний регулятор
По-перше, проведемо синтез пропорцiйного регулятору та виконаємо оцiнку якостi регулювання. Замiсть блока Gain встановимо блок PID Controller
, перемикнемо його до режиму P
та за допомогою утiлити PID Tune
проведемо налаштування вiдклику системи. Встановимо час вiдклику системи на рiвнi Tвiдклик = 0.5 с. При цьому коефiцiєнт пiдсилення склав:
KP = 6732
Результати моделювання наведено на анимацii (кадр 4).
Результати моделювання показують, що при змiнi швидкостi вiтру змiнюється помилка системи. Вiдносно до заданої величини виходу помилка не перевищує 5%, час перехiдного процесу при рiзних змiнах швидкостi вiтру досить мало (до 2 с) i задовольняє технiчним вимогам, що пред'являються до систем такого типу.
Таким чином, можна вважати, що пропорцiйний регулятор цiлком придатний до реалiзацiї в системi управлiння вiтроенергетичною установкою. Позбавитись встановленої помилки можна за рахунок пiдвищення порядку системи та введення пропорцiйно-iнтегруючого регулятора.
5.2.2. Пропорцiйно-iнтегруючий регулятор
В блоцi PID Controller
перемикнемо з режиму P
до режиму PI
у формi Parallel
та за допомогою утiлити PID Tune
проведемо налаштування вiдклику системи. Встановимо час вiдклику системи на рiвнi Tвiдклик = 5 с. При цьому коефiцiєнти регулятора становлять:
KP PI = 4828
KI PI = 2200
Результати моделювання наведено на кадрi 5.
Результати моделювання показують, що встановлена помилка системи дорiвнює 0 рад/с, час перехiдного процесу при рiзних змiнах швидкостi вiтру досить мало (до 4 с), помилка регулювання при змiнi вiтру майже на 50% (tмод = 10 с) досягає 20%, але це цiлком допустимо при таких рiзких змiнах швидкостi вiтру.
Можна зробити висновок, що спроектований регулятор задовольняє технiчним вимогам, що пред'являються до систем такого типу.
Висновки
Метою є – підвищення потужності вітрогенератора, за рахунок вдосконалення системи управління кутом повороту лопатей вітроенергетичної установки при зміні швидкості і напряму вітру.
Для досягнення поставленої мети поставлені наступні завдання:
- провести аналіз вітроенергетичної установки як об'єкта управління, вхідні, що обурюють і вихідні канали;
- розробити функціональну і структурну схеми системи управління вітроенергетичної установки, яка включає канали впливів, що обурюють;
- зробити вибір технічних засобів і розробити принципову схему системи автоматичного управління;
- розробити алгоритм роботи системи автоматичного управління.
Таким чином, всі поставлені завдання дослідження виконані і можна вважати, що мета проекту досягнута.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: травень 2016 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелiк посилань
- Ветроэнергетика / под редакцией Д. де Рензо: Пер. с англ. Я. И. Шефтера. – М.: Энергоатомиздат, 1982. – C. 272.
- Дорф Р., Бишоп Р. Современные системы управления: Пер. с англ. Б. И. Копылова. – М.: Лаборатория Базовых Знаний, 2004. – C. 832.
- Клюев А. С. Проектирование систем автоматизации технологических процессов / А. С. Клюев, Б. В. Глазов, А. Х. Дубровский. – М.: Энергия, 1980. – C. 345.
- Куликовский Н. Н. Система управления электроустановкой / Н. Н. Куликовский // ПиКАД. – 2003. – №1-2. – С. 20-21.
- Кривцов В. С. Неисчерпаемая энергия. Кн.1. Ветроэнергогенераторы: учебник / B. C. Кривцов, A. M. Олейников, А. И. Яковлев. – X.: Нац. аэрокосм, ун-т
Харьк. авиац. ин-т
, Севастополь: Севаст. нац. полит. ун-т, 2003. – C. 400. - Сабинин Г. Х. Характеристики ветродвигателя в зависимости от направления ветра. Труды ЦАГИ, вып. 28 /Г .Х. Сабинин. – М.: ЦАГИ, 1926. – C. 112.
- Солод М. Ветроэнергетика. Попытка реанимации? / М. Солод //Наука и техника. – 2008. – С. 21-26.