
Система автоматического управления ветроэнергетической установкой
Содержание
- Введение
- 1. Цель и задачи разработки САУ
- 2. 1. Анализ состояния вопроса автоматизации ветроэнергетической установкой
- 2.1. Описание технологической схемы получения электрической энергии с помощью ветроэнергетических станций
- 2.2. Технологическая схема ВЭУ
- 2.3. Ветроэнергетическая станция как объекта управления
- 3. Разработка функциональной схемы системы автоматического управления
- 4. Выбор технических средств системы управления
- 4.1. Датчик угла поворота и скорости поворота лопастей
- 4.2. Датчик угловой скорости генератора
- 4.3. Датчик скорости и направления ветра
- 4.4. Модули ввода/вывода
- 4.5. Блок питания
- 4.6. Программируемый логический контроллер
- 5. Моделирование работы и синтез регуляторов для СУ ВЕУ
- 5.1. Моделирование работы системы
- 5.2. Синтез регулятора
- 5.2.1. Пропорциональный регулятор
- 5.2.2. Пропорционально-интегрирующий регулятор
- Выводы
- Список использованных источников
Введение
Ветровая энергетика – это получение механической энергии от ветра с последующим превращением ее в электрическую. Ветрогенератор (ветроэлектрическая установка или сокращенно ВЭУ) это устройство для преобразования кинетической энергии ветра в электрическую для дальнейшего использования. Сегодня ветрогенераторы – высокотехнологичное изделие мощностью от 5 кВт до 4500 кВт единичной мощности.
Во всем мире наблюдается бурное развитие ветроэнергетической отрасли, обусловленное, прежде всего, введением различных льгот для девелоперов альтернативной энергетики, а также принятием так называемых зеленых
тарифов на электроэнергию, полученную с использованием ВЭУ, которые являются одними из самых высоких в Европе. В частности, для ветроустановок мощностью свыше 2 МВт величина зеленого
тарифа составляет около 11,3 евроцента за 1 кВт/ч. Установленные зеленые
тарифы будут действовать до 2030 года.
Ветрогенераторы можно разделить на две категории: промышленные ветрогенераторы и домашние ветрогенераторы для частного пользования. Часто, их объединяют в сети, в результате чего получается ветряная электростанция. Единственное важное требование для ВЭС – высокий среднегодовой уровень ветра. При этом повысить эффективность выроботки электрической энергии возможно регулированием угла поворота лопастей вокруг оси маха для обеспечения поддержания постоянства угловой скорости ротора в условиях изменения скорости и направления ветра, а также нагрузки.
Проектирование систем управления основывается на требовании обеспечить надежную и экономичную работу ветроэлектроустановок. Принятие проектных решений, как правило, выполняется на основе типовых, уже имеющихся проектов, но наука и техника постоянно развиваются. Создаются новые, более совершенные алгоритмы управления и аппаратные решения. [1]
1. Цель и задачи разработки САУ
Цель работы – внедрение САУ ветроэнергетической установкой позволит повысить мощность ветрогенератора, за счет совершенствования системы управления углом поворота лопастей ветроэнергетической установки при изменении скорости и направления ветра.
Назначение разработки – основными функциям, выполняемым САУ, должны быть функции:
- автоматическое управление углом поворота лопастей ветроэнергетической установки;
- компенсация влияния изменения скорости и направления ветра на мощность ветроэнергетической установки;
- обеспечение взаимодействия с оперативным и обслуживающим персоналом.
2. Анализ состояния вопроса автоматизации ветроэнергетической установкой
2.1. Описание технологической схемы получения электрической энергии с помощью ветроэнергетических станций
Воздушные потоки у поверхности Земли или моря являются ламинарными – нижележащие слои тормозят расположенные выше. Этот эффект заметен до высоты 1 км, но резко снижается уже на высотах больше 100 м. Высота расположения генератора выше этого пограничного слоя одновременно позволяет увеличить диаметр лопастей и освобождает площади на земле для другой деятельности. Ветрогенератор начинает производить ток при ветре 3 м/с и отключается при ветре более 25 м/с. Максимальная мощность достигается при ветре 15 м/с. [2]
Мощность ветрогенератора зависит от мощности воздушного потока (N), определяемой скоростью ветра и ометаемой площадью:
N=pSV3/2,
где V – скорость ветра;
p – плотность воздуха;
S – ометаемая площадь.
Нельзя оценивать энергию ветра, не проведя тщательного измерения его скорости, характерной для данной местности. Так для Донецкой области средняя скорость ветра составляет 4,5-5 м/с (рис. 2.1).[3]

Рисунок 2.1 – Скорость ветра в Донбассе
Помимо значения средней скорости ветра существует еще ряд параметров, необходимых для определения ветрового потенциала. К этим параметрам относятся: максимальная скорость ветра, количество последовательных дней, когда скорость ветра превышает 5 м/с; продолжительность периодов безветрия или постоянного ветра (рис. 2.2).
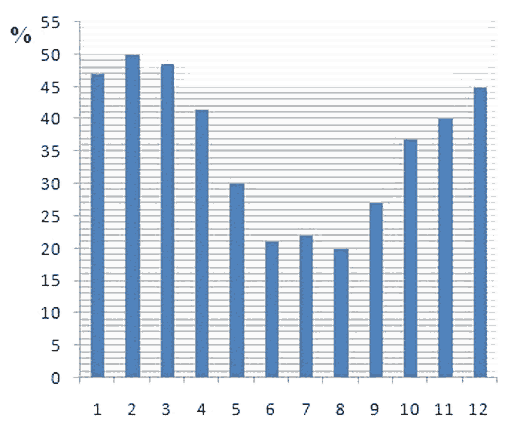
Рисунок 2.2 – Часть ветров, пригодных для потребностей ветроэнергетики по месяцам (Донецкая область)
Из рисунка 2.2 видно, что Донецкая область обладает необходимым ветровым потенциалом для строительства ветроэнергетических установок, что подтверждается данными по количеству установленных ветроэнергетических мощностей в Донецкой области – 88,3 МВт (2013 г.)
Наиболее распространенные ветряные электростанции состоят из генератора, хвостовика, мачты, контроллера, инвертора и аккумуляторной батареи. Сила ветра вращает колесо с лопастями, передавая крутящий момент через редуктор на вал генератора. Кроме непосредственно ветрогенератора, установка включает:
- контроллер: преобразует переменный ток, который вырабатывается генератором в постоянный для заряда аккумуляторных батарей;
- аккумуляторные батареи: служат для накопления электроэнергии и последующего ее использования энергосистемой в безветренные часы. Также они выравнивают и стабилизируют выходящее напряжение из генератора;
- анемоскоп и датчик направления ветра: отвечают за сбор данных о скорости и направлении ветра в установках средней и большой мощности;
- автоматический переключатель источника питания (АВР): производит автоматическое переключение между несколькими источниками электропитания за промежуток в 0,5 с при исчезновении основного источника;
- инвертор: преобразует ток из постоянного, который накапливается в аккумуляторных батареях, в переменный, который потребляет большинство электроприборов.
2.2. Технологическая схема ВЭУ
Существует два основных класса ветроэнергетических установок (ВЭУ):
- горизонтально-пропеллерные;
- вертикально-осевые.
Сегодня многие страны эксплуатируют вертикально-осевые ветроустановки с криволинейными лопастями ротора Дарье (США, Канада, Нидерланды) или Н-ротором (Великобритания, Украина, Румыния). Эффективность работы вертикально-осевых ветроустановок принципиально не зависит от направления ветра. Поэтому для них отпадает необходимость в системах и механизмах ориентации на ветер.
Наибольшая эффективность горизонтально-пропеллерных ВЭУ достигается только при условии обеспечения устойчивости коллинеарности оси ветроколеса и направления ветра. При этом необходимость ориентации на ветер требует наличия в конструкциях ВЭУ специальных механизмов и систем управления для непрерывного наблюдения за ветровой обстановкой.
Считается, что наиболее перспективными являются горизонтально-пропеллерные ВЭУ с регулируемым углом поворота лопастей вокруг оси маха для обеспечения поддержания постоянства угловой скорости ротора в условиях изменения скорости и направления ветра, а также нагрузки.
В качестве объекта исследований выберем горизонтально-пропеллерную ВЭУ с регулируемым углом поворота лопастей ротора.
Схема устройства современной горизонтально-пропеллерной ВЭУ с регулируемым углом поворота лопастей ротора приведены на рис. 2.3.
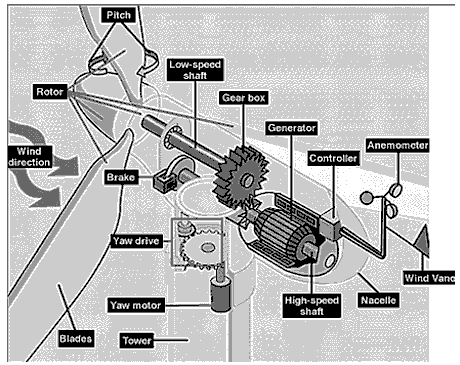
Рисунок 2.3 – Технологическая схема ветряной установки
2.3. Ветроэнергетическая станция как объекта управления
Количество энергии, произведенной за счет ветра, зависит от:
1. Плотности воздуха.
Плотность зависит от количества молекул в единице объема. При нормальном атмосферном давлении и при температуре 15°С плотность воздуха составляет 1,225 кг/м3. Однако с увеличением влажности плотность воздуха слегка уменьшается. Из-за того, что зимой воздух более плотный, ветрогенератор будет вырабатывать зимой больше энергии, чем летом, при одинаковой скорости ветра. На территории, расположенной высоко над уровнем моря, например, в горах, атмосферное давление меньше и, соответственно, меньше плотность воздуха.
2. Площади, охваченной лопастями ветротурбины при вращении.
Чем больше площадь ротора, тем больше электроэнергии он может выработать. Однако, процесс увеличения площади ротора нельзя свести к простому удлинению лопастей ВЭУ. Увеличивая размер площади, охватываемой лопастями при вращении, увеличивается нагрузка на систему при той же скорости ветра. Для того, чтобы система выдержала все нагрузки, необходимо усилить все ее механические компоненты. Становится понятно, что подобное решение проблемы требует дополнительных финансовых затрат.
3. Скорости ветра.
Скорость ветра является наиболее важным фактором, влияющим на количество энергии, которое ВЭУ может преобразовать в электроэнергию. Большая скорость ветра увеличивает объем проходящих воздушных масс. Поэтому с увеличением скорости ветра возрастает и количество электроэнергии, выработанной ВЭУ.
Таким образом, с точки зрения вход-выход, исследуемый объект регулирования горизонтально-пропеллерная ВЭУ с поворотными лопастями можно представить в виде последовательного соединения соответствующих блоков: регулирующей ступени – блока поворотных лопастей, блока выработки суммарного крутящего момента – ротора ВЭУ и блока электрического генератора (схема приведена на рис. 3.1).

Рисунок 2.4 – Схема материальных потоков объекта регулирования
На рис. 2.4 приняты следующие обозначения:
- V(t) – скорость ветра;
- θ(t) – угол поворота лопасти относительно оси маха;
- Мкр(t) – крутящий момент, создаваемый лопастью;
- Mcкр(t) – суммарный крутящий момент, создаваемый ротором ВЭУ;
- ωг(t) – угловая скорость вращения ротора электрогенератора;
- Iн(t) – ток нагрузки электрогенератора;
- U(t) – напряжение на выходе генератора.
3. Разработка функциональной схемы системы автоматического управления
Функциональная схема являются основным техническим документом, определяющим функционально-блочную структуру отдельных узлов автоматического контроля, управления и регулирования технологического процесса получения электроэнергии при помощи ветрогнератора и оснащение объекта управления приборами и средствами автоматизации.
Функциональная схема разрабатывается с учетом состава и структуры функциональных узлов системы управления выделенных на этапе постановки задачи на проектирование (рис. 3.1).

Рисунок 3.1 – Функциональная схема системы автоматического управления ВЭУ
4. Выбор технических средств системы управления
Критерием выбора технических средств системы служит качество, надежность, стоимость оборудования, полнота и достаточность программного обеспечения, а также возможность получения технических консультаций и обучение у высококвалифицированных специалистов фирмы поставщика, и конечно, гарантийное и послегарантийное обслуживание.
4.1. Датчик угла поворота и скорости поворота лопастей
Применим датчик T20WN, предназначенный для измерений статических и динамических крутящих моментов силы и скоростей вращения или угла поворота (рис. 4.1).
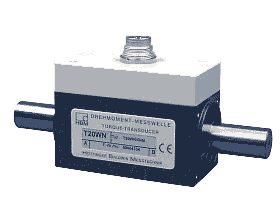
Рисунок 4.1 – Внешний вид датчика T20WN
4.2. Датчик угловой скорости генератора
Используем датчик крутящего момента T40FM, предназначенный для измерений статических и динамических крутящих моментов силы и скоростей вращения или угла поворота, в широком диапазоне нагрузок.
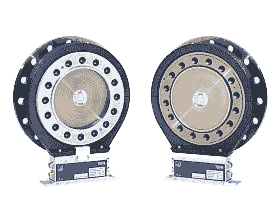
Рисунок 4.2 – Внешний вид датчика T40FM
4.3. Датчик скорости и направления ветра
Датчик скорости и направления ветра ДВ-160 предназначен для измерения скорости и направления ветра. Датчик обладает малой инерционностью и высокой чувствительностью.
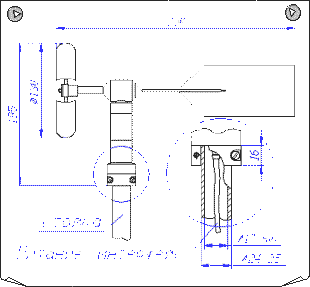
Рисунок 4.3 – Габаритные размеры датчика скорости ветра ДВ-160
4.4. Модули ввода/вывода
Для подключения датчика T40FM к системе управления применим модуль удаленного счетчика импульсов I-7080 (измерение скорости вращения электрогенератора генератора) и модуль удаленного аналогового ввода I-7017 (измерение крутящего момента) от компании ICP DAS.
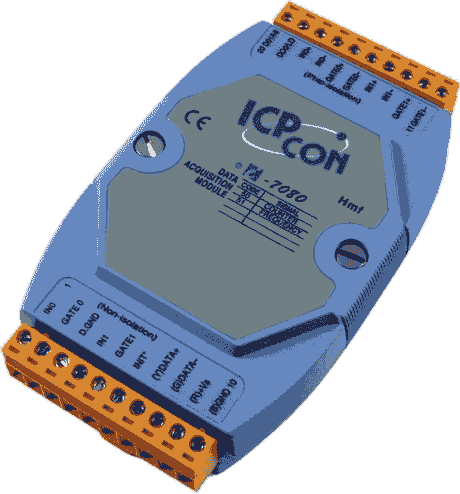
Рисунок 4.4 – Внешний вид модуля I-7080
4.5. Блок питания
Для питания выбранных технических средств стабильным напряжением применим блок питания ОВЕН БП14.
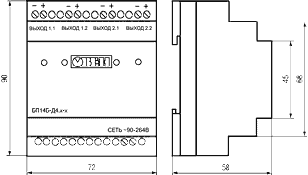
Рисунок 4.5 – Габаритные размеры блока питания ОВЕН БП14
Многоканальный блок питания ОВЕН БП14Б-Д4.4-24 – блок питания с выходной мощностью 14 Вт, с диапазоном входного напряжения 90…264 В переменного тока частотой 47-63 Гц, в корпусе предназначенном для крепления на DIN рейку, питание стабилизированным напряжением 24 В постоянного тока по 4 каналам. Максимальный ток нагрузки на канал 145 мА.
4.6. Программируемый логический контроллер
В качестве промышленного контроллера используем iPAC-8000 – это семейство программируемых контроллеров автоматизации от компании ICP DAS. Данный контроллер совмещает в себе открытость и функциональность компьютера (PC) и надежность программируемого логического контроллера PLC. Контроллер iPAC-8000 универсален и может использоваться в автоматизации производства, автоматизации зданий, нефтехимической индустрии, в задачах мониторинга и телемеханики, решениях M2M и др.
iPAC-8000 работает под управлением операционной системой Mini OS7 имеет порты Ethernet, RS-232/RS-485 и слоты расширения.
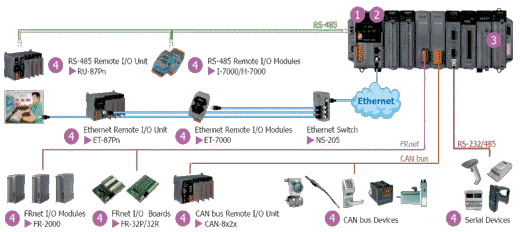
Рисунок 4.6 – Основные компоненты системы PAC-8000
Из семейства контроллеров PAC-8000 выберем IP 8817 PC (рис. 4.6) – совместимый промышленный контроллер 80МГц, 512кб Flash, 512кб SRAM, 2xRS232, 1xRS485, 1xRS232 / 485, 7-сегментный индикатор, Mini OS7, 8 слотов расширения, IsaGRAF.
5. Моделирование работы и синтез регуляторов
5.1. Моделирование работы системы
Будем моделировать работу системы, подавая на вход порывисто переменный ветер. График скорости ветра приведены на анимации.
В качестве регулятора установим пропорциональное звено с коэффициентом усиления KR = 1. Таким образом, увидим влияние обратной связи и дополнительных каналов. Система установления угла лопастей в зависимости от скорости ветра отработала следующим образом (кадр 2).
Время установки нового угла не превышает 3 с, что является вполне приемлемым для этого канала регулирования. Дополнительных мер по форсированию управления по этому каналу не требуется. Но основной выходной сигнал – угловая скорость генератора ветроустановки ω(t) очень сильно меняется в зависимости от скорости ветра. График изменения скорости приведен на кадре 3.
Это вполне неприемлемо, поэтому нужен синтез регулятора, который обеспечит постоянную скорость при изменениях ветра.
Анимация – Графики зависимостей (анимация состоит из 5 кадров с задержкой в 5 секунд между ними, количество циклов повторения – 7)
5.2. Синтез регулятора
5.2.1. Пропорциональный регулятор
Во-первых, проведем синтез пропорционального регулятора и выполняем оценку качества регулирования, вместо блока Gain установим блок PID Controller
, переключаем его на режим P
и с помощью утилиты PID Tune
проведем настройки вызова системы. Установим время отклика системы на уровне Tотклик = 0.5 с. При этом коэффициент усиления составил:
KP = 6732
Результаты моделирования приведены на анимации (кадр 4).
Результаты моделирования показывают, что при изменении скорости ветра изменяется ошибка системы. Относительно заданной величины выхода ошибка не превышает 5%, время переходного процесса при различных изменениях скорости ветра достаточно мало (до 2 с) и удовлетворяет техническим требованиям, предъявляемым к системам такого типа.
Таким образом, можно считать, что пропорциональный регулятор вполне пригоден к реализации в системе управления ВЭУ. Избавиться установленной ошибки можно за счет повышения порядка системы и введение пропорционально-интегрирующего регулятора.
5.2.2. Пропорционально-интегрирующий регулятор
В блоке PID Controller
переключим с режима P
на режим PI
в форме Parallel
и с помощью утилиты PID Tune
проведём настройку отклика системы. Установим время отклика системы на уровне Tотклика = 5 с. При этом коэффициенты регулятора:
KP PI = 4828
KI PI = 2200
Результаты моделирования приведены на кадре 5.
Результаты моделирования показывают, что установлена ошибка системы равна 0 рад/с, время переходного процесса при различных изменениях скорости ветра достаточно мало (до 4 с), ошибка регулирования при изменении ветра почти на 50% (tмод = 10 с) достигает 20%, но это допустимо при таких резких изменениях скорости ветра.
Можно сделать вывод, что спроектированный регулятор удовлетворяет техническим требованиям, предъявляемым к системам такого типа.
Выводы
Целью является – повышение мощности ветрогенератора, за счет совершенствования системы управления углом поворота лопастей ветроэнергетической установки при изменении скорости и направления ветра.
Для достижения поставленной цели решены следующие задачи:
- провести анализ ветроэнергетической установки как объекта управления, входные, возмущающих и выходные каналы;
- разработать функциональную и структурную схемы системы управления ветроэнергетической установки, которая включает каналы возмущающих воздействий;
- произвести выбор технических средств и разработать принципиальную схему системы автоматического управления;
- разработать алгоритм работы системы автоматического управления.
Таким образом, все поставленные задачи исследования выполнены и можно считать, что цель проекта достигнута.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: май 2016 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список использованных источников
- Ветроэнергетика / под редакцией Д. де Рензо: Пер. с англ. Я. И. Шефтера. – М.: Энергоатомиздат, 1982. – C. 272.
- Дорф Р., Бишоп Р. Современные системы управления: Пер. с англ. Б. И. Копылова. – М.: Лаборатория Базовых Знаний, 2004. – C. 832.
- Клюев А. С. Проектирование систем автоматизации технологических процессов / А. С. Клюев, Б. В. Глазов, А. Х. Дубровский. – М.: Энергия, 1980. – C. 345.
- Куликовский Н. Н. Система управления электроустановкой / Н. Н. Куликовский // ПиКАД. – 2003. – №1-2. – С. 20-21.
- Кривцов В. С. Неисчерпаемая энергия. Кн.1. Ветроэнергогенераторы: учебник / B. C. Кривцов, A. M. Олейников, А. И. Яковлев. – X.: Нац. аэрокосм, ун-т
Харьк. авиац. ин-т
, Севастополь: Севаст. нац. полит. ун-т, 2003. – C. 400. - Сабинин Г. Х. Характеристики ветродвигателя в зависимости от направления ветра. Труды ЦАГИ, вып. 28 /Г .Х. Сабинин. – М.: ЦАГИ, 1926. – C. 112.
- Солод М. Ветроэнергетика. Попытка реанимации? / М. Солод //Наука и техника. – 2008. – С. 21-26.