
Реферат по темі Розробка системи керування робота пилососа
Зміст
- Вступ
- Актуальність теми
- 1. Огляд мобільних роботів
- 1.1. Загальне визначення та поняття
- 1.2. Класифікація мобільних роботів за функціональним призначенням
- 1.3. Узагальнена структура мобільного робота
- 1.4. Система керування та її особливості
- 1.5. Вимоги до обладнання та вибір елементів робота пилососа
- 1.5.1. Вимога до електроприводів
- 1.5.2. Вимоги до системи керування
- Висновок
- Список джерел
Вступ
Сьогоднi робототехніка активно застосовується в тих сферах життєдіяльності, в яких є необхідність заміни людської праці машинною.
Основою автоматизації автотранспорту, авіатранспорту, військової справи, сучасної промисловості і в інших сферах діяльності людей є робототехнічні системи. Промислові роботи вже давно застосовуються в авіабудуванні, в суднобудуванні і в масі інших різних підприємств. У медичній практиці так само використовують робототехнічні системи, що дає можливість діагностувати різноманітні захворювання, а також проводити хірургічні операції. Не будемо забувати про те що, існують не тільки промислові роботи, а й роботи широкого споживання, які використовуються в побуті, адже зараз активно ведуться розробки і випуск на світовий ринок таких роботів.
На сьогоднішній день автономні мобільні роботизовані системи є найбільш перспективним напрямком в робототехніці. Такі системи відрізняються від інших особливістю керування, вони повністю не залежать від оператора, ґрунтуються на аналізі показників датчиків і прийнятті рішень потрібних дій.
На даний момент існує два особливо популярних роботів широкого застосування – робот газонокосильщик і робот пилосос, який відмінно справляється зі своїм призначенням – проводить прибирання приміщень. Можливо, дуже скоро з'явиться на світовому ринку бюджетний і багатофункціональний обслуговуючий робот, який не буде ні для кого новим відкриттям, а буде таким же звичайним предметом побутової техніки, як пральна машина або ж посудомийна машина.
Актуальність теми
Вже сьогодні в усьому світі, в значній мірі, збагачуються області досліджень і застосувань мобільних роботів – мехатронних систем, в основі яких лежать підсумкові досягнення механіки, мікропроцесорної техніки, контрольно – вимірювальних систем, інформатики та теорії керування.
Для успішної реалізації широкого спектру завдань роботам необхідно бути мобільними, а так само мати здатність інтерпретувати, створювати план і автоматично реалізовувати отримане завдання, користуючись бортовою обчислювальною системою.
Методи керування мобільними роботами розвинені на базі вже побудованих моделей і алгоритмів. Такі роботи мають здатність адаптуватися до змін в своєму оточенні, реагують на непередбачені ситуації та повторюють свої дії, спираючись на попередній досвід. Тому, мобільному роботу необхідна система керування з наявністю елементів штучного інтелекту.
Колісні роботи знаходять своє застосування в перевірці приміщень або ж транспортуванні маси різних предметів з початкової точки до кінцевої в неструктурованому, а тому іноді і небезпечному для людського життя робочому просторі. Як предмет керування такий робот являє собою багатоканальну нелінійну динамічну систему.
Незважаючи на те, що на сьогоднішній день проведений цілий ряд досліджень в галузі керування мобільними колісними роботами, універсальні підходи до синтезу систем автоматичного керування колісними роботами розроблені недостатньо.
Таким чином, актуальність теми визначається необхідністю виробництва більш досконалих систем керування колісних роботів.
1. Огляд мобільних роботів
1.1. Загальне визначення та поняття
Робот, як термін, можна розуміти як багатофункціональний автомат для виконання механічної роботи, схожу на ту, що виконує людина. Думка про створення робота з'явилася після прагнення замінити людину на робота в важких і небезпечних для життя ситуаціях. З плином часу поняття робот стало ширше, під ним стали представляти будь-яку автоматичну машину, яка може замінити людину, і яка буде нагадувати його розумну поведінку [2].
Мобільний робот вміє пересуватися в робочому просторі відповідно до програми керування. Такі роботи необхідно програмувати заздалегідь. Повинна бути присутня здатність самостійно орієнтуватися в навколишньому середовищі і здійснювати виконання завдання, спираючись тільки на власний штучний інтелект. Тому ці роботи і мають назву – мобільні, тому що вони не прив'язані до оператора.
1.2. Класифікація мобільних роботів за функціональним призначенням
Таблиця 1 – Класифікація мобільних роботів.
| Група | Базові вимоги | Базовий варіант використання |
| Спеціального призначення | Компактність, безшумність | Автономне, один канал передачі відеоінформації |
| Для військових і воєнізованих застосувань | Надійність, простота в управлінні, стандартизована корисне навантаження | У складі розвідувальних, ударних і охоронних комплексів, багатоканальні системи передачі різноманітних даних |
| Для екстремальних ситуацій, наукових досліджень, кінематографічних застосувань | Стійкість до несприятливих зовнішніх впливів, універсальність по відношенню до корисного бортового навантаження | Автономне, багатоваріантність реалізації каналів передачі даних |
| Для спортивних, промислових і побутових застосувань | Простота в управлінні, економічність, надійність | Автономне, один канал передачі відеоданих |
В магістерській роботі буде розглядатися мобільний робот групи – cпортивних, промислових і побутових застосувань [6].
1.3. Узагальнена структура мобільного робота.
По конструкції багатофункціональні роботи представляють собою самохідні засоби, обладнані апаратурою розвідки, набором робочого обладнання, який можна замінити і інструментом. Вони мають на увазі наявність дистанційного керування і можливість вести відеоспостереження.
1.4. Система керування та її особливості.
Система керування дає можливість керувати рухом всього обладнання поміщеного в корпус робота. Але не варто забувати і про адаптивне керування ходової частини і про енергетичну установку з урахуванням взаємодії транспортної системи з оточенням.
Система керування включає в себе інформативно – керувальна частину. До неї входить: апаратура керування роботом, різні датчики і мікропроцесори; пост оператора мобільного робота (ПУ – пульт керування, персональний комп'ютер для можливості обробляти інформацію), а також приймально–передавальної апаратури, яка дає можливість передавати інформацію та команди керування.
У загальному випадку системою керування таких роботів виконуються наступні функції:
- За допомогою датчиків сприймає і розпізнає інформацію, яка надходить з навколишнього середовища.
- Обмін інформацією з оператором.
- Планування і перепланування дій.
- Керування приводами.
- Обмін інформацією з іншими роботами.
Отже, розглянемо ці особливості щодо мобільних роботів, які довільно переміщаються в будь–якій місцевості. В даному випадку модель навколишнього середовища буде представлена у вигляді карти місцевості, яка будується і уточнюється в процесі переміщення робота на основі сенсорної інформації. Така модель повинна мати два рівня за масштабом. Перший рівень призначений для меж досяжності сенсорних систем. Другий рівень призначений для визначення місцевості перед самим роботом [7].
Блок керування переміщення реалізує керування тяговими приводами і приводами повороту шасі. Блок моделювання маршруту синтезує траєкторію руху, оптимізуючи її, по мінімуму втрати енергії, що вкрай важливо для роботів з автономним живленням, або по мінімуму часу завдання, коли в постановку задачі входить умова забезпечення максимальної швидкодії.
Блок моделювання плану місцевості показує її в такій формі, щоб було зручно реалізувати завдання вибору маршруту, з урахуванням перешкод і нерозпізнаних ділянок [1].
Якщо реалізація завдання вимагає знання більшої ділянки місцевості, ніж дають сенсорні системи в базовому положенні робота, карта місцевості формується і передається в блок побудови маршруту фрагментами в міру пересування робота. Такими ж ділянками послідовно реалізується і синтез траєкторії переміщення. В такому випадку перше наближення для всієї траєкторії робиться по апріорної інформації про місцевість або, як мінімум, визначається загальний напрямок переміщення.
На нижньому загальносистемному рівні системи керування є канал керування переміщенням в ближній зоні, що включає в себе найбільш детальну модель цієї зони і виконує алгоритм забезпечення безпеки переміщення [9].
1.5. Вимоги до обладнання та вибір елементів робота пилососа
1.5.1. Вимога до електроприводів
Для керування роботом пилососом потрібен великий діапазон регулювання швидкості, висока точність підтримки швидкості обертання приводу. Звідси випливає, що необхідним є застосування двигуна постійного струму (ДПС) з редуктором.
Двигуном постійного струму (ДПС) називається електрична машина постійного струму, що перетворює електричну енергію постійного струму в механічну енергію. Існують різні типи двигунів постійного струму: незалежного збудження, паралельного збудження, послідовного збудження і змішаного збудження [4].
Основними параметрами систем двигуна постійного струму є діапазон регулювання швидкості, точність підтримки швидкості обертання приводу.
Таблиця 2 – Переваги і недоліки двигунів постійного струму.
| Переваги | Недоліки |
1. Широкий і безступінчатий діапазон регулювання частоти обертання; 2. Простота регулювання частоти обертання; 3. Жорсткі механічні характеристики, що задовольняють вимогам до приводів верстатів, зокрема, у двигунів з незалежним, паралельним збудженням; 4. Велику перевантажну здатність з коефіцієнтом перевантаження в межах Кп = Мп / Мн = 2,5 ... 10; де Мп – пусковий момент, Мн – номінальний момент. 5. Порівняно мала інерційність (достатню швидкодію) [3]. |
1.Складність конструкції; 2. При їх застосуванні потрібен перетворювач змінного струму в постійний. |
Для розроблювального робота пилососа, необхідно застосування приводів, які відповідають таким вимогам:
- Швидкість обробки заданого положення;
- Надійність;
- Мала маса і малі габарити приводу;
- Наявність стандартного посадкового місця для зручності розміщення і монтажу;
- Висока енергоефективність;
- Доступність;
-
Для вибору мотора проведемо наступні розрахунки:
- Приймаємо швидкість руху робота – 45 см / сек.
- Розрахунок швидкості обертання ведучого колеса. Здійснюється за формулою:
Припустимо, що вага робота буде – 2 кг.
 , , |
де V – швидкість руху робота (см / сек), а D – діаметр ведучого колеса (см).
Діаметр обраних ведучих коліс – 4,5 см, відповідно, їх швидкість обертання складе
 , , |
Необхідний двигун повинен мати вбудований понижаючий редуктор. Швидкість обертання валу редуктора при номінальному навантаженні – не менш 200 об / хв.
Таблиця 3 – Вибір двигунів з доступних у продажу.
| Модель двигуна | Характеристики | ||
| JGY–370B |
|
Напруга 12 В; Максимальна швидкість 115 об./хв; Швидкість при номінальному навантаженні 95 об/хв; Струм при номінальному навантаженні 110 мА; Передаточне число редуктора 1:37; Вага 0,22 кг; Розмір 77мм; Ціна 1 366,97 руб. |
|
| GM37–520 |
|
Напруга 12 В; Максимальна швидкість 320 об./хв; Швидкість при номінальному навантаженні 200 об/хв; Струм при номінальному навантаженні 150 мА; Передаточне число редуктора 1:30; Вага 0,152 кг; Розмір 60мм; Ціна 1 512,75 руб. |
|
| GM25–370 |
|
Напруга 9 В; Максимальна швидкість 150 об./хв; Швидкість при номінальному навантаженні 100 об/хв; Струм при номінальному навантаженні 1200 мА; Передаточне число редуктора 1:10; Вага 0,1 кг; Розмір 25мм; Ціна 460 руб. |
|
| GA12–N20 |
|
Напруга 6 В; Максимальна швидкість 450 об./хв; Швидкість при номінальному навантаженні 300 об / хв; Струм при номінальному навантаженні 170 мА; Передаточне число редуктора 1:30; Вага 0,012 кг; Розмір 24мм; Ціна 550 руб. |




З вище перерахованих моторів для робота пилососа були обрані двигуни постійного струму типу GA12–N20
Рисунок 1 – двигун постійного струму типу GA12–N20
(анімація: 5 кадрів, 5 циклів повторення, 126 кілобайт)
Даний тип електродвигунів був обраний, тому що на відміну від вище перерахованих двигунів вони досить компактних розмірів (довжина – 25 мм, ширина – 12 мм), мають гранично малу вагу (0, 012 кг). Є в наявності енкодер. Передавальне число таких моторів 1:30, 450 об / хв, 210 імпульсів на оборот. При виборі значну роль зіграла економічна частина, тому що ціна таких моторів значно нижче своїх аналогів. А також, характеристики даного двигуна близькі до значень розрахунків. В роботі пилососі будуть використані двигуни в кількості двох штук.
1.5.2. Вимога до системи керування
В даний час, для реалізації систем керування електроустаткуванням, в т.ч. і електроприводами, застосовують обчислювальні пристрої, зокрема мікроконтролери.
Мікроконтролер (англ. Micro Controller Unit, MCU) – мікросхема, призначена для керування електронними пристроями. Типовий мікроконтролер поєднує на одному кристалі функції процесора і периферійних пристроїв, містить ОЗУ і (або) ПЗУ. По суті, це однокристальний комп'ютер, здатний виконувати досить прості завдання. Відрізняється від мікропроцесора інтегрованими в мікросхему пристроями введення – виведення, таймерами і іншими периферійними пристроями.
Використання в сучасному мікроконтролері достатнього потужного обчислювального пристрою з широкими можливостями, побудованого на одній мікросхемі замість цілого набору, значно знижує розміри, енергоспоживання і вартість побудованих на його базі пристроїв [5].
Програмування мікроконтролерів зазвичай здійснюється на мові асемблера або Сі, хоча існують компілятори для інших мов, наприклад, Форту і Бейсика.
У промисловості набули поширення різні мікроконтролери, це AVR і SAM3 фірми Atmel, STM8 і STM32 фірми STMicroelectronics, PIC фірми Microchip.
Для виконання системи керування розробляємого робота пилососа, необхідний мікроконтролер, якій відповідають наступни вимоги:
- наявність не менше 8 КБ пам'яті програм.
- наявність незалежної пам'яті EEPROM для запису і зберігання робочих даних.
- наявність не менше 5 апаратних таймерів з можливістю формування ШІМ сигналу.
- наявність апаратного інтерфейсу для зв'язку з ПК.
- наявність не менше 15 GPIO.
- низьке енергоспоживання.
- забезпечення вихідного струму через порт не менше 20 мА, для керування силовими ключами і пристроями індикації без застосування узгоджувальних каскадів.
- підтримка безкоштовними IDE.
- можливість програмування, як на мовах низького рівня, так і на мовах високого рівня.
- можливість швидкого виконання математичних операцій, таких як множення, ділення, а також тригонометричних функцій.
-
Вибір плати Arduino Pro Mini
- Arduino Pro Mini побудована на мікроконтролері ATmega168;
- Arduino Pro Mini побудована на мікроконтролері ATmega328.
Плата на ATmega168 буде коштувати дешевше, ніж на ATmega328. А головна відмінність цих контролерів в тому, що ATmega328 містить на борту в два рази більше пам'яті, ніж ATmega168 [10].
Таблиця 4 – Відмінності мікроконтролерів.
| Флеш пам `ять | Оперативна пам'ять | EEPROM | |
| ATmega168 | 16 Кбайт | 1 Кбайт | 512 байт |
| ATmega328 | 32 Кбайт | 2 Кбайт | 1024 байт |
Одже, для проекту 16 Кбайт цілком достатньо. Була обрана плата Arduino Pro Mini, яка побудована на мікроконтролері ATmega168.
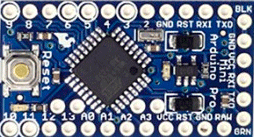
Рисунок 2 – Arduino Pro Mini побудована на мікроконтролері ATmega168
Таблиця 5 – Характеристики плати.
| Робоча напруга | 5 В |
| Вхідна напруга | 5 – 12 В |
| Цифрові Входи/Виходи | 14 (6 з яких можуть використовуватися як виходи ШІМ) |
| Аналогові входи | 6 |
| Постійний струм через вхід/вихід | 40 мА |
| Тактова частота | 16 МГц |
| Габарити | 1,8х3,3 см. |
Висновки
В процесі написання огляду мобільного робота була вивчена структура і система керування мобільного робота, були обрані двигуни постійного струму з енкодером типу GA12 – N20 і мікросхема Arduino Pro Mini побудована на мікроконтролері ATmega168.
На момент написання даного реферату магістерська робота ще не завершена. Орієнтовна дата завершення магістерської роботи: травень 2018 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік джерел
- Астапкович А.М., Анисимов А.Л., Елисеенко А.Г., Суханов И.О. Современные тенденции построения систем управления дистанционно-пилотируемыми летательными аппаратами. // В кн.: Информационно-управляющие системы для подвижных объектов. СПб: Политехника, 2002. С. 7 32.
- Основы роботехники [Электронный ресурс]. – Режим доступа: http://www.gruppa-prolif.ru/content/view/76/98/.
- Практическая робототехника [Электронный ресурс]. – Режим доступа: http://www.roboclub.ru/index/.
- Бобровский С.Навигация мобильных роботов/Сергей Бобровский/ PC Week/RE («Компьютерная неделя») / [Электронный ресурс]. – Режим доступа: http://www.pcweek.ru/themes/detail.php?ID=66917.
- Курейчик В.М. Генетические алгоритмы и их применение/В.М.Курейчик .– Таганрог: ТРТУ, 2002.
- Плотников В.А. Анализ эффективности существующих методов уклонения от столкновения для мобильного робота / Плотников В.А. – Донецк: Штучний інтелект – 2010.
- Емельянов В.В. Теория и практика эволюционного моделирования/ В. В.Емельянов, В. В. Курейчик В. В., В. М. Курейчик. – М: Физматлит, 2003. – 432 c.
- Мельник А.А. Мобильные роботы компании «K-Team» для решения специфических технических задач / Мельник А.А., Борисенко В.Ф., Хоменко В.Н., Плис П.С. – Кременчук, 2010 – С. 36 – 39. – (Вісник КДПУ ім. М. Остроградського, випуск 4/2010 (63). Частина 3).
- Commande d’un robot mobile rapide aroues non directionnelles sur sol naturel. These de doctorat presentee a l’universite Рaris 6: 10.04.2008 - 198с.
- Стёпкин А.В. Распознавание графов с помощью коллектива агентов // Диссертация на соискание ученой степени кандидата физико-математических наук. – 2015. – С.1-185.