
Реферат по теме «Разработка системы управления робота пылесоса»
Содержание
- Введение
- Актуальность темы
- 1. Обзор мобильных роботов
- 1.1. Общее определение и понятие
- 1.2. Классификация мобильных роботов по функциональному назначению
- 1.3. Обобщенная структура мобильного робота
- 1.4. Система управления и ее особенности
- 1.5. Требования к оборудованию и выбор элементов робота пылесоса
- 1.5.1. Требование к электроприводам
- 1.5.2. Требования к системе управления
- Вывод
- Список источников
Введение
В наши дни робототехника активно применяется в тех сферах жизнедеятельности, в которых требуется необходимость замены человеческого труда машинным.
Основой автоматизации автотранспорта, авиатранспорта, военного дела, современной промышленности и в других сферах деятельности людей являются робототехнические системы. Промышленные роботы уже давно применяются в авиастроении, в судостроении и в массе других различных предприятий. Промышленные роботы применяются при выполнении различных операций, таких как изготовление и сборка деталей, сварка каких–либо металлических элементов, а так же в обслуживании различных оборудований. В медицинской практике так же используют робототехнические системы, что дает возможность диагностировать всевозможные заболевания, а так же проводить хирургические операции. Не будем забывать о том что, существуют не только промышленные роботы, но и роботы широкого потребления, которые используются в быту, ведь сейчас активно ведутся разработки и выпуск на мировой рынок таких роботов.
На сегодняшний день автономные мобильные роботизированные системы являются наиболее перспективным направлением в робототехнике. Такие системы отличаются от других особенностью управления, они полностью не зависят от оператора, основываются на анализе показаний датчиков и принятии решений требующихся действий.
На данный момент существует два особенно популярных роботов широкого применения – робот газонокосильщик и робот пылесос, который отлично справляется со своим предназначением – производит уборку помещения. Возможно, очень скоро появится на мировом рынке бюджетный и многофункциональный обслуживающий робот, который не будет ни для кого новым открытием, а будет таким же обыденным предметом бытовой техники, как стиральная машина или же посудомоечная машина.
Актуальность темы
Уже сегодня во всем мире, в значительной мере, обогащаются области исследований и применения мобильных роботов – мехатронных систем, в основе которых лежат итоговые достижения механики, микропроцессорной техники, контрольно – измерительных систем, информатики и теории управления.
Для благополучной реализации широкого спектра задач роботам необходимо быть мобильными, а так же иметь способность интерпретировать, создавать план и автоматически реализовывать полученное задание, пользуясь бортовой вычислительной системой. Основная отличительная черта таких роботов заключается в том, что они имеют возможность достигать конечной цели в неопознанной окружающей среде, предотвращая столкновения с любыми препятствиями и перемещающимися объектами.
Методы управления мобильными роботами развиты на базе уже построенных моделей и алгоритмов. Такие роботы имеют способность адаптироваться к изменениям в своем окружении, реагируют на непредвиденные ситуации и повторяют свои действия, опираясь на предыдущий опыт. Поэтому, мобильному роботу необходима система управления с наличием элементов искусственного интеллекта.
Колесные роботы находят свое применение в проверке помещения или же транспортировке массы разных предметов из начальной точки к конечной точке в неструктурированном, а потому, иногда, и опасном для человеческой жизни рабочем пространстве. Как предмет управления такой робот представляет собой многоканальную нелинейную динамическую систему.
Невзирая на то, что сегодняшний день произведен целый ряд исследований в области управления мобильными колесными роботами, универсальные подходы к синтезу систем автоматического управления колесными роботами разработаны недостаточно.
Таким образом, актуальность темы определяется необходимостью производства более совершенных систем управления колесных роботов, подходящих к нынешним требованиям.
1. Обзор мобильных роботов
1.1. Общее определение и понятие
Робот, как термин, можно понимать так – многофункциональный автомат для выполнения механической работы, похожей на ту, что выполняет человек. Когда создавались первоначальные роботы и вплоть до нашего времени примером для них брали возможности человека. Мысль о создании робота появилась в последствии стремления заменить человека на робота в тяжелых и опасных для жизни ситуациях. С течением времени понятие робот стало шире, под ним стали представлять любую автоматическую машину, которая может заменить человека, и которое будет напоминать его разумное поведение.
Мобильный робот умеет передвигаться в рабочем пространстве в соответствии с программой управления. Такие роботы необходимо программировать заранее. Должна присутствовать способность самостоятельно ориентироваться в окружающей среде и осуществлять выполнение задания, опираясь только на собственный искусственный интеллект. Потому эти роботы и имеют название – мобильные, так как они не привязаны к оператору [2].
1.2. Классификация мобильных роботов по функциональному назначению
Таблица 1 – Классификация мобильных роботов.
| Группа | Базовые требования | Базовый вариант использования |
| Специального назначения | Компактность, бесшумность | Автономное, один канал передачи видеоинформации |
| Для военных и военизированных применений | Надежность, простота в управлении, стандартизованная полезная нагрузка | В составе разведывательных, ударных и охранных комплексов, многоканальные системы передачи разнообразных данных |
| Для экстремальных ситуаций, научных исследований, кинематографических применений | Устойчивость к неблагоприятным внешним воздействиям, универсальность по отношению к полезной бортовой нагрузке | Автономное, многовариантность реализации каналов передачи данных |
| Для спортивных, промышленных и бытовых применений | Простота в управлении, экономичность, надежность | Автономное, один канал передачи видеоданных |
В данной магистерской работе будет рассматриваться мобильный робот группы – «Спортивных, промышленных и бытовых применений».
Для задач такого класса характерным является относительная неизменность района и использование штатного состава полезной нагрузки. А также необходимо обеспечить хранение и обработку объема получаемой информации [6].
1.3. Обобщенная структура мобильного робота.
По конструкции многофункциональные роботы представляют собой самоходные средства, оборудованные аппаратурой разведки, набором рабочего оборудования, который можно заменить и инструментом. Они подразумевают наличие дистанционного управления и возможность вести видеонаблюдение.
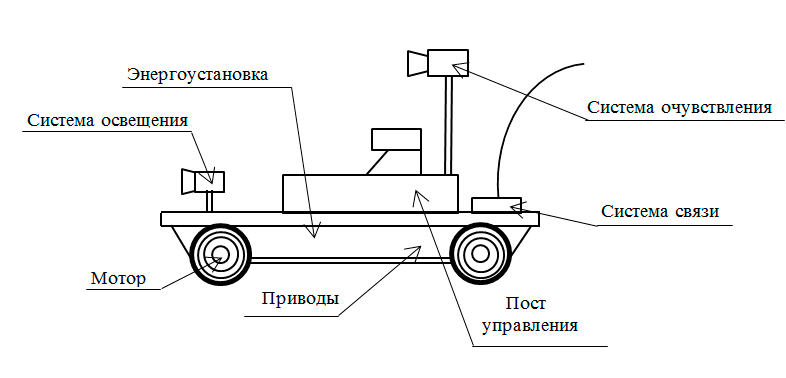
Рисунок 1 – Обобщенная структура мобильного робота.
1.4. Система управления и ее особенности.
Система управления дает возможность управлять движением всего оборудования помещенного в корпус робота. Но не стоит забывать и о адаптивном управлении ходовой части и о энергетической установке с учетом взаимодействия транспортной системы с окружением.
Система управления включает в себя информативно – управляющую часть, сюда входит: аппаратура управления роботом, все различные датчики и микропроцессоры; пост оператора мобильного робота (ПУ – пульт управления, персональный компьютер для возможности обрабатывать информацию и видеопросмотровые устройства), а так же приемно–передающей аппаратуры, которая дает возможность передавать информацию и команды управления.
Система управления движением дает возможность спланировать движения в недетерминированных условиях на основе картографической базы, и принимать во внимание непрерывно поступающую информацию в систему управления.
В общем случае системой управления таких роботов выполняются следующие функции:
- При помощи датчиков воспринимает и распознает информацию, которая поступает из окружающей среды.
- Обмен информацией с оператором.
- Планирование и перепланирование действий.
- Управление приводами.
- Обмен информацией с другими роботами.
Итак, рассмотрим эти особенности относительно мобильных роботов, которые произвольно перемещаются в какой–либо местности. В данном случае модель окружающей среды будет представлена в виде карты местности, которая строится и уточняется в процессе перемещения робота на основе сенсорной информации. Такой модели необходимо иметь два уровня по масштабу. Первый уровень предназначен для пределов достигаемости сенсорных систем. Второй уровень предназначен для определения местности перед самим роботом [7].
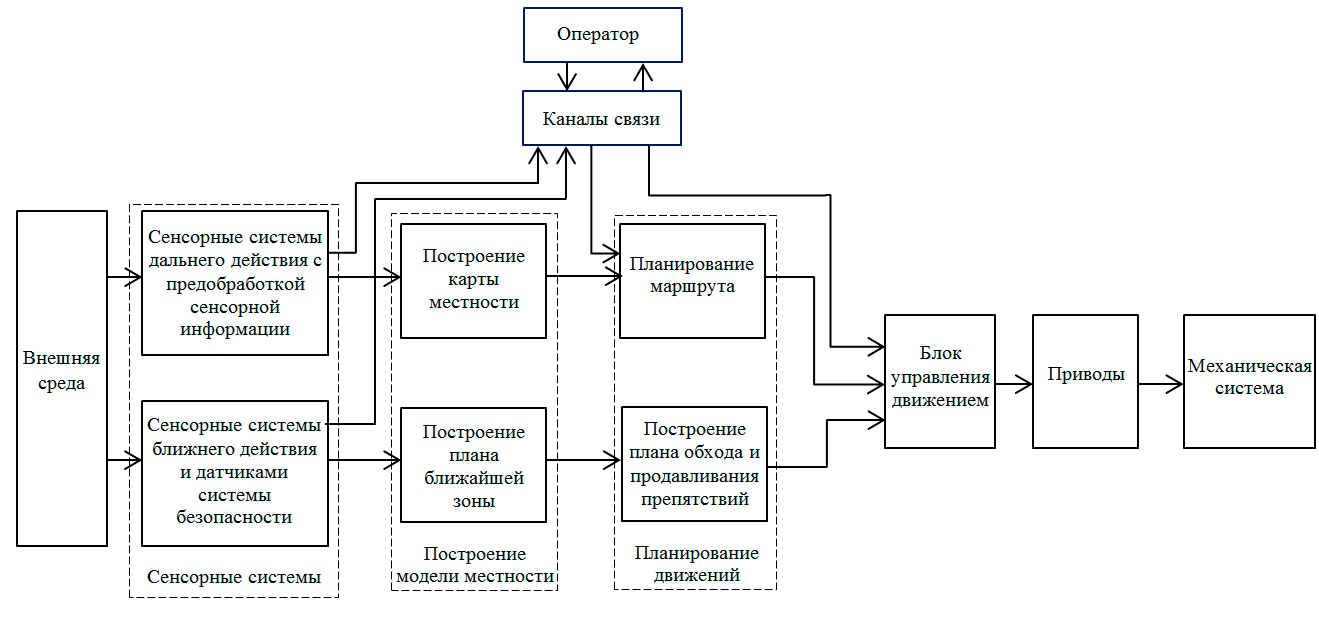
Рисунок 2 – Типовая схема системы управления перемещения мобильного робота.
Блок управления перемещения реализует управление тяговыми приводами и приводами поворота шасси. Блок моделирования маршрута синтезирует траекторию перемещения, оптимизируя ее, по минимуму потери энергии, что крайне важно для роботов с автономным энергопитанием, или по минимуму времени задания, когда в постановку задачи входит условие обеспечения максимального быстродействия.
Блок моделирования плана местности выражает ее в такой форме, чтобы было удобно реализовать задачи выбора маршрута, с учетом препятствий и нераспознанных участков [1].
Если реализация задачи требует знания большего участка местности, чем дают сенсорные системы в базовом положении робота, карта местности формируется и передается в блок построения маршрута фрагментами по мере передвижения робота. Такими же участками последовательно реализуется и синтез траектории перемещения. В таком случае первое приближение для всей траектории делается по априорной информации о местности или, как минимум, определяется общее направление перемещения.
На нижнем общесистемном уровне системы управления имеется канал управления перемещением в ближней зоне, включающий в себя наиболее детальную модель этой зоны и выполняющий алгоритм обеспечения безопасности перемещения [9].
Требуемый уровень адаптации и искусственного интеллекта системы выявляются степенью неопределенности и сложности местности и характером подлежащих выполнению задач, т.е. назначение робота. В последнем отношении основное значение имеет минимально необходимая степень автономности управления роботом, определяемая перечнем его действий, которые должны реализовываться без участия человека – оператора. При этом учитывается и возможность временной потери связи с оператором, ограниченная пропускная способность каналов связи, неполнота и ограниченная достоверностью получаемой оператором от робота информации и ее задержка во времени.
1.5. Требования к оборудованию и выбор элементов робота пылесоса
1.5.1. Требование к электроприводам
Для управления роботом пылесосом, требуется большой диапазон регулирования скорости, высокая точность поддержания скорости вращения привода. Отсюда следует, что необходимым является применение двигателя постоянного тока (ДПТ) с редуктором [8].
Двигателем постоянного тока (ДПТ) называется электрическая машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию. Существуют различные типы двигателей постоянного тока: независимого возбуждения, параллельного возбуждения, последовательного возбуждения и смешанного возбуждения [4].
Основными параметрами систем двигателя постоянного тока является диапазон регулирования скорости, точность поддержания скорости вращения привода.
Таблица 2 – Достоинства и недостатки двигателей постоянного тока.
| Достоинства | Недостатки |
1. Широкий и бесступенчатый диапазон регулирования частоты вращения; 2. Простота регулирования частоты вращения; 3. Жесткие механические характеристики, удовлетворяющие требованиям к приводам станков, в частности, у двигателей с независимым, параллельным возбуждением; 4. Большую перегрузочную способность с коэффициентом перегрузки в пределах Кп = Мп ÷ Мн = 2,5…10; где Мп – пусковой момент, Мн – номинальный момент; 5. Сравнительно малая инерционность (достаточное быстродействие)[3] |
1. Сложность конструкции; 2. При их применении требуется преобразователь переменного тока в постоянный. |
Для разрабатываемого робота пылесоса, необходимо применение приводов, соответствующих следующим требованиям:
- Скорость обработки заданного положения;
- Надежность;
- Малая масса и малые габариты привода;
- Наличие стандартного посадочного места для удобства размещения и монтажа;
- Высокая энергоэффективность;
- Доступность.
-
Для выбора мотора произведем следующие расчеты:
- Принимаем скорость движения робота – 45 см / сек.
- Расчет скорости вращения ведущего колеса. Производится по формуле:
Предположим, что вес робота будет – 2 кг.
 , , |
где V – скорость движения робота (см / сек), а D – диаметр ведущего колеса (см).
Диаметр выбранных ведущих колес – 4,5 см, соответственно, их скорость вращения составит.
 , , |
Необходимый двигатель должен иметь встроенный понижающий редуктор. Скорость вращения вала редуктора при номинальной нагрузке – не менее 200 об / мин.
Таблица 3 – Выбор двигателей из доступных в продаже.
| Модель двигателя | Характеристики | ||
| JGY–370B |
|
Напряжение 12 В; Максимальная скорость 115 об / мин; Скорость при номинальной нагрузке 95 об / мин; Ток при номинальной нагрузке 110 мА; Передаточное число редуктора 1:37; Вес 0,22 кг; Размер 77 мм; Цена 1 366,97 руб; |
|
| GM37–520 |
|
Напряжение 12 В; Максимальная скорость 320 об / мин; Скорость при номинальной нагрузке 200 об / мин; Ток при номинальной нагрузке 150 мА; Передаточное число редуктора 1:30; Вес 0,152 кг; Размер 60 мм; Цена 1 512,75 руб. |
|
| GM25–370 |
|
Напряжение 9 В; Максимальная скорость 150 об / мин; Скорость при номинальной нагрузке 100 об / мин; Ток при номинальной нагрузке 1200 мА; Передаточное число редуктора 1:10; Вес 0,1 кг; Размер 25 мм; Цена 460 руб. |
|
| GA12–N20 |
|
Напряжение 6 В; Максимальная скорость 450 об / мин; Скорость при номинальной нагрузке 300 об / мин; Ток при номинальной нагрузке 170 мА; Передаточное число редуктора 1:30; Вес 0,012 кг; Размер 24 мм; Цена 550 руб. |




Из выше перечисленных моторов для робота пылесоса были выбраны двигатели постоянного тока типа GA12–N20
Рисунок 3 – двигатель постоянного тока типа GA12–N20
(анимация: 5 – кадров, 5 – циклов повторения, 126 – килобайт)
Данный тип электродвигателей был выбран, потому как в отличии от выше перечисленных двигателей они весьма компактных размеров (длины – 25 мм, ширина – 12 мм), имеют предельно малый вес (0,012 кг). Имеется в наличии энкодер. Передаточное число таких моторов 1:30. 450 об / мин, 210 импульсов на оборот. При выборе значительную роль сыграла экономическая часть, так как цена таких моторов значительно ниже своих аналогов. А так же, характеристики данного двигателя близки со значениями расчетов. В роботе пылесосе будут использованы двигатели в количестве двух штук.
1.5.2. Требование к системе управления
В настоящее время, для реализации систем управления электрооборудованием, в т.ч. и электроприводами, применяют вычислительные устройства, в частности микроконтроллеры.
Микроконтроллер (англ. Micro Controller Unit, MCU) – микросхема, предназначенная для управления электронными устройствами. Типичный микроконтроллер сочетает на одном кристалле функции процессора и периферийных устройств, содержит ОЗУ и (или) ПЗУ. По сути, это однокристальный компьютер, способный выполнять относительно простые задачи. Отличается от микропроцессора интегрированными в микросхему устройствами ввода – вывода, таймерами и другими периферийными устройствами.
Использование в современном микроконтроллере достаточного мощного вычислительного устройства с широкими возможностями, построенного на одной микросхеме вместо целого набора, значительно снижает размеры, энергопотребление и стоимость построенных на его базе устройств [5].
Программирование микроконтроллеров обычно осуществляется на языке ассемблера или Си, хотя существуют компиляторы для других языков, например, Форта и Бейсика.
В промышленности получили распространение различные микроконтроллеры, это AVR и SAM3 фирмы Atmel, STM8 и STM32 фирмы STMicroelectronics, PIC и фирмы Microchip.
Для исполнения системы управления разрабатываемого робота пылесоса, необходим микроконтроллер, отвечающие следующим требованиям:
- наличие не менее 8 КБ памяти программ;
- наличие энергонезависимой памяти EEPROM для записи и хранения рабочих данных;
- наличие не менее 5 аппаратных таймеров с возможностью формирования ШИМ сигнала;
- наличие аппаратного интерфейса для связи с ПК;
- наличие не менее 15 GPIO;
- низкое энергопотребление;
- возможность внутрисхемного программирования;
- обеспечение выходного тока через порт не менее 20 мА, для управления силовыми ключами и устройствами индикации без применения согласующих каскадов;
- поддержка бесплатными IDE;
- возможность программирования, как на языках низкого уровня, так и на языках высокого уровня;
- возможность быстрого выполнения математических операций, таких как умножение, деление, а также тригонометрических функций.
-
Выбор платы Arduino Pro Mini
- Arduino Pro Mini построенная на микроконтроллере ATmega168;
- Arduino Pro Mini построенная на микроконтроллере ATmega328:
Плата на ATmega168 будет стоить дешевле, чем на ATmega328. Главное же отличие этих контроллеров в том, что ATmega328 содержит на борту в два раза больше памяти, чем ATmega168[10].
Таблица 4 – Отличия микроконтроллеров.
| Флеш память | Оперативная память | Электрически стираемое перепрограммируемое ПЗУ | |
| ATmega168 | 16 Кбайт | 1 Кбайт | 512 байт |
| ATmega328 | 32 Кбайт | 2 Кбайт | 1024 байт |
Так как для проекта 16 Кбайт вполне достаточно была выбрана плата Arduino Pro Mini построеная на микроконтроллере ATmega168.
Рисунок 4 – Arduino Pro Mini построенная на микроконтроллере ATmega168.
Таблица 5 – Характеристики платы.
| Рабочее напряжение | 5 В |
| Входное напряжение | 5 – 12 В |
| Цифровые Входы/Выходы | 14 (6 из которых могут использоваться как выходы ШИМ) |
| Аналоговые входы | 6 |
| Постоянный ток через вход / выход | 40 мА |
| Тактовая частота | 16 МГц |
| Габариты | 1,8 × 3,3 см. |
Выводы
В процессе написания обзора мобильного робота была изучена структура и система управления мобильного робота, были выбраны двигатели постоянного тока с энкодером типа GA12–N20 и микросхема Arduino Pro Mini построеная на микроконтроллере ATmega168.
На момент написания данного реферата магистерская работа еще не завершена. Ориентировочная дата завершения магистерской работы: май 2018 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Астапкович А.М., Анисимов А.Л., Елисеенко А.Г., Суханов И.О. Современные тенденции построения систем управления дистанционно-пилотируемыми летательными аппаратами. // В кн.: Информационно-управляющие системы для подвижных объектов. СПб: Политехника, 2002. С. 7 32.
- Основы роботехники [Электронный ресурс]. – Режим доступа: http://www.gruppa-prolif.ru/content/view/76/98/.
- Практическая робототехника [Электронный ресурс]. – Режим доступа: http://www.roboclub.ru/index/.
- Бобровский С.Навигация мобильных роботов/Сергей Бобровский/ PC Week/RE («Компьютерная неделя») / [Электронный ресурс]. – Режим доступа: http://www.pcweek.ru/themes/detail.php?ID=66917.
- Курейчик В.М. Генетические алгоритмы и их применение/В.М.Курейчик .– Таганрог: ТРТУ, 2002.
- Плотников В.А. Анализ эффективности существующих методов уклонения от столкновения для мобильного робота / Плотников В.А. – Донецк: Штучний інтелект – 2010.
- Емельянов В.В. Теория и практика эволюционного моделирования/ В. В.Емельянов, В. В. Курейчик В. В., В. М. Курейчик. – М: Физматлит, 2003. – 432 c.
- Мельник А.А. Мобильные роботы компании «K-Team» для решения специфических технических задач / Мельник А.А., Борисенко В.Ф., Хоменко В.Н., Плис П.С. – Кременчук, 2010 – С. 36 – 39. – (Вісник КДПУ ім. М. Остроградського, випуск 4/2010 (63). Частина 3).
- Commande d’un robot mobile rapide aroues non directionnelles sur sol naturel. These de doctorat presentee a l’universite Рaris 6: 10.04.2008 - 198с.
- Стёпкин А.В. Распознавание графов с помощью коллектива агентов // Диссертация на соискание ученой степени кандидата физико-математических наук. – 2015. – С.1-185.