
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования
- 3. Мобильный робот. Классификация мобильных роботов
- 4. Выбор аппаратной части
- 4.1 L298 Dual H-Bridge драйвер
- 4.2 Стабилизатор напряжения LM7805
- 4.3 Стабилизатор напряжения LF33cv
- 4.4 Bluetooth-модуль HC-05
- 4.5 Ультразвуковой датчик измерения расстояния HC-SR04
- 4.6 Цифровой датчик линии TCRT5000
- 5. Экспериментальная платформа мобильного робота
- 6. Организация питания мобильного робота
- Выводы
- Список источников
Введение
Каждый год на рынке робототехники прокручивается
5-6 миллиардов долларов, и эта цифра постоянно растет. Видимо, век накопления знаний и теоретической науки сменяется новой эпохой – когда всевозможные роботы и механизмы заполняют мир. По последним данным, сегодня в мире работают 1,8 млн. самых различных роботов – промышленных, домашних, роботов-игрушек. Что же такое робот?
Робот – это электромеханическое, пневматическое, гидравлическое устройство, программа, либо их комбинация, работающая без участия человека и выполняющие действия, обычно осуществляемые человеком. Другими словами робот – это автоматическое устройство, имитирующее движения и действия человека. Робот построен по компьютерной технологии, сознание робота – это вычислительная машина, с которой информация может быть считана и перенесена на отдельный носитель. Робот не лечится, а ремонтируется путем ввода соответствующих диагностических программ.
У робота отсутствует ассоциативное мышление. У него отсутствует любопытство – есть лишь программа по накоплению информации, которая ему необходима. Робот все понимает умом, душевные качества ему не присущи – все-таки он не имеет души.
Однако сегодня у специалистов в области робототехники возникают примерно те же трудности, что и 30 лет назад у разработчиков ЭВМ. Из-за отсутствия общих стандартов и платформ создателям роботов приходится начинать разработку каждого нового творения практически с нуля [1].
1. Актуальность темы
В последнее время все большую актуальность стали приобретать процессы автоматизации всего технического оборудования, применяемого в станках, машинах и механизмах, робототехнических комплексах. Благодаря внедрению в производство новых технологий, существенно повышается производительность труда, причем доля ручного труда по сравнению с автоматизированным значительно уменьшается. Повышается технический уровень выпускаемой продукции, существенно улучшается ее качество. Все это, наверное, невозможно было бы осуществить без микропроцессорных вычислительных средств. Приборы, которые выполнены с применением микропроцессоров, имеют более высокие показатели в работе по сравнению с приборами, выполненными на отдельных логических схемах, причем стоимость первых значительно меньше.
2. Цель и задачи исследования
Целью магистерской работы является создание структуры мобильного робота и исследование системы управления мобильного робота.
Основные задачи исследования:
- Составление схемы управления мобильным роботом;
- Выбор микроконтроллера;
- Выбор аппаратной части робота;
- Анализ полученных результатов.
3. Мобильный робот. Классификация мобильных роботов
Мобильный робот – автономная система, существующая в физическом мире, не имеет фиксированного места расположения, может ощущать свое окружение и может воздействовать на него, чтобы достичь каких-то целей.
В современной робототехнике роботы определяются как класс технических систем, которые в своих действиях воспроизводят двигательные и интеллектуальные функции человека. От обычной автоматической системы робот отличается многоцелевым назначением, большой универсальностью, возможностью перестройки на выполнение разнообразных функций.
Роботы можно классифицировать по:
- областям применения – производственные (промышленные), военные (боевые, обеспечивающие), исследовательские, медицинские;
- среде обитания (эксплуатации) – наземные, подземные, надводные, подводные, воздушные, космические;
- степени подвижности – стационарные, мобильные;
- типу системы управления – программные, адаптивные, интеллектуальные;
- функциональному назначению – манипуляционные, транспортные, информационные, комбинированные;
- уровню универсальности – специальные, специализированные, универсальные.
Также роботы классифицируются по конструктивным признакам:
- типу исполнительных приводов – электрические, гидравлические, пневматические;
- типу движителя – гусеничные, колесные, колесно-гусеничные, полугусеничные, шагающие, колесно-шагающие, роторные, с петлевым, винтовым, водометным и реактивным движителями;
- конструктивным особенностям технологического оборудования – по числу манипуляторов, по грузоподъемности манипуляторов, по системе координат рабочей зоны (линейная, угловая);
- типу источников первичных управляющих сигналов – электрические, биоэлектрические, акустические [2].
4. Выбор аппаратной части
В качестве обьекта управления в данной работе выступает разработанный мобильный робот #WallEPro. Робот состоит из следующих датчиков и модулей: ультразвуковой датчик расстояния HC-SR04, Bluetooth-модуль HC-05, цифровой датчик линии TCRT5000, цифровой гироскоп GY-50 L3G4200D, ультразвуковой сенсор Sonar-EZ1, L298 Dual H-Bridge драйвер, стабилизаторы напряжения LF33cv и 7805.
4.1 L298 Dual H-Bridge драйвер
L298n представляет собой двойной мостовой драйвер для управления двунаправленными нагрузками с токами до 2А и напряжением от 4.5 В до 46 В. Микросхема разработана для управления реле, соленоидами, двигателями постоянного тока и шаговыми двигателями. L298n имеет TTL совместимые входы. В L298n существует разделение электропитания для логической схемы и для нагрузки, что позволяет подключить нагрузку с меньшим или большим напряжением питания, чем у микросхемы, а также уменьшает помехи.

Рисунок 1 – Двойной мостовой драйвер L298n
Микросхемы L298n имеют встроенную защиту от перегрева. Выходы микросхемы отключаются при нагреве до температуры около +70°С [3].
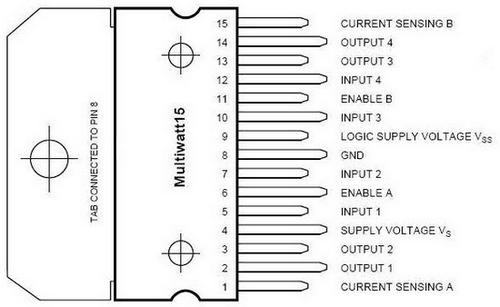
Рисунок 2 – Расположение выводов драйвера L298n
| 1 | SENS-A | Контроль тока 1 и 2 каналов |
|---|---|---|
| 2 | OUT2 | Выход 2 канала |
| 3 | OUT3 | Выход 3 канала |
| 4 | Vs | Питание нагрузки |
| 5 | IN1 | Вход 1 канала |
| 6 | EN-A | Разрешение работы 1 и 2 канала |
| 7 | IN2 | Вход 2 канала |
| 8 | GND | Общий вывод |
| 9 | Vss | Питание логики (+5V) |
| 10 | IN3 | Вход 3 канала |
| 11 | EN-B | Разрешение работы 3 и 4 канала |
| 12 | IN4 | Вход 4 канала |
| 13 | OUT3 | Выход 3 канала |
| 14 | OUT4 | Выход 4 канала |
| 15 | SENS-B | Контроль тока 3 и 4 каналов |
| Максимальное напряжение питания Vs | 50V |
|---|---|
| Максимальное напряжение питания Vss | 7V |
| Входное напряжение (IN, EN) | -0,3...7V |
| Напряжение на входах SENS | -1V...+2,3V |
| Максимальный постоянный выходной ток | ± 2A |
| Максимальный импульсный выходной ток (5ms однократно) | ± 3A |
| Максимальная рассеиваемая мощность | 25W |
| Диапазон температур | -25...+130°C |
На основе datasheet к L298n была спроектирована и сделана плата драйвера. Сделаны датчики тока на одной и на другой стороне моста драйвера. На плате установлена светодиодная индикация, которая показывает направление движения двигателя.

Рисунок 3 – Плата драйвера L298n
4.2 Стабилизатор напряжения LM7805
Классический параметрический стабилизатор напряжения 5В LM7805 в корпусе ТО-220. Проверенный временем и миллионами любительских и профессиональных конструкций, стабилизатор незаменим в конструкциях, для которых важна не только стабильность напряжения, но и минимальный уровень шумов напряжения питания. Простое подключение и минимальное количество дополнительных внешних компонентов.

Рисунок 4 – Стабилизатор напряжения LM7805
Для стабильной работы стабилизатора необходимо установить на входе и выходе по керамическому и электролитическому конденсатору емкостью 0,1 мкФ и 100 мкФ на напряжение не ниже напряжения соответствующей цепи.
Характеристики стабилизатора:
- Входное напряжение: от 7В до 25В;
- Выходное напряжение: 5В;
- Максимальный выходной ток: 1,5А;
- Корпус: ТО-220.
После определенных тестов данного стабилизатора возникла необходимость повысить ток. Подключив два таких стабилизатора в параллель, мы получили в два раза больше выходного тока [4].
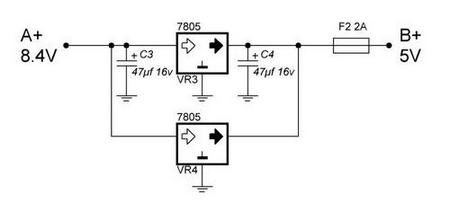
Рисунок 5 – Схема подключения стабилизаторов LM7805
4.3 Стабилизатор напряжения LF33cv
Стабилизатор напряжения с фиксированным выходом 3.3В. Отличается высокой стабильностью и высоким выходным током в 800 мА.

Рисунок 6 – Стабилизатор напряжения LF33cv
Характеристики:
- Выходное напряжение: 3.3В;
- Выходной ток: 500 мА;
- Максимальное входное напряжение: 16В;
- Падение напряжения: 1В (входное не может быть ниже чем 3.3 + 1 = 4.3В)
- Встроенная токовая и температурная защита;
- Корпус: TO-220;
- Производитель: STMicroelectronics
После определенных тестов данного стабилизатора возникла необходимость повысить ток. Подключив два таких стабилизатора в параллель, мы получили в два раза больше выходного тока [8].
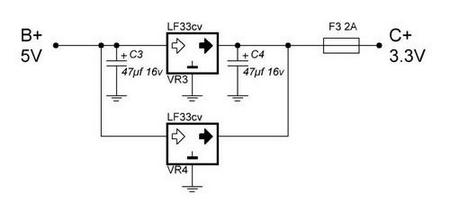
Рисунок 7 – Схема подключения стабилизаторов напряжения LF33cv
4.4 Bluetooth-модуль HC-05
Bluetooth уже давно и прочно вошёл в нашу жизнь в качестве удобного протокола связи различных устройств: мобильных телефонов, ноутбуков, КПК, гарнитур, мышей, клавиатур… Список можно ещё долго продолжать. Обычно эту технологию интегрируют в свои продукты крупные производители электроники в виде малюсенькой микросхемы в корпусе BGA или QFN. А как быть нам, простому электронному люду, не владеющими тёмными силами создания 4-слойных плат и кунг-фу микромонтажа? Для этого есть Bluetooth-модуль HC-05 от наших китайских собратьев [5].

Рисунок 8 – Bluetooth-модуль HC-05
4.5 Ультразвуковой датчик измерения расстояния HC-SR04
Используя ультразвуковые волны, он измеряет расстояние до объекта или просто обнаруживает препятствие на пути движения подвижной конструкции. На плате модуля размещены пьезо-излучатель ультразвука и воспринимающий отраженную волну микрофон. В отличие от инфракрасных дальномеров, на ультразвуковой датчик HC-SR04 не влияют источники света или цвет препятствия. Могут возникнуть затруднения при определении расстояния до пушистых или тонких объектов. Обращаем внимание, что скорость звука в воздухе зависит от температуры. Это влияет на точность датчика. Типичными областями применения являются парковочные датчики, контроллеры уровня, устройства мониторинга местности и другие [6].
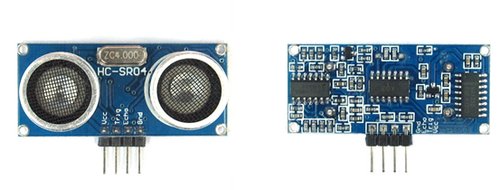
Рисунок 9 – Ультразвуковой датчик измерения расстояния HC-SR04
4.6 Цифровой датчик линии TCRT5000
Цифровой датчик линии позволяет определять цвет поверхности около него. Выходом является простой бинарный цифровой сигнал: логический 0 или 1 в зависимости от цвета, который он видит перед собой. Единица – чёрный или пустота, ноль – не чёрный [7].

Рисунок 10 – Цифровой датчик линии TCRT5000
5. Экспериментальная платформа мобильного робота
Основой разрабатываемого робота является отладочная платаSTM32F4. На первом уровне робота, показанного на рисунке 12, расположены двигатели постоянного тока, два драйвера для управления двигателями, Bluetooth-модуль HC-05, цифровые датчики линии TCRT5000, платы преобразования сигнала, ультразвуковые датчики приближения HC-SR04, стабилизаторы напряжения LF33cv и LM7805, гироскоп. На втором уровне, показанном на рисунке 13, находиться сама отладочная плата STM32F4, а также питание робота. Драйвера были сделаны собственноручно на основе микросхемы подобии драйверов L298N. Автономное питание осуществляется с помощью литий-ионных батарей взятых с ноутбука. Для безопасной работы литий-ионных аккумуляторов в виду их взрывоопасности предусмотрены предохранители. В дальнейшем планируется замена корпуса робота и создание нового на 3Dпринтере.
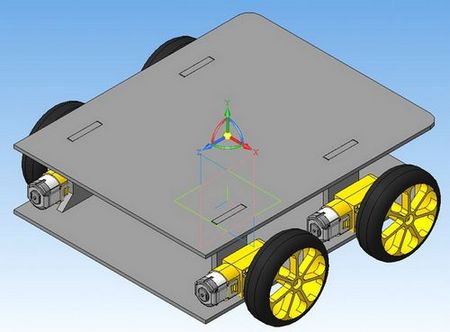
Рисунок 11 – Примерный вид модели робота

Рисунок 12 – Первый уровень робота

Рисунок 13 – Второй уровень робота
6. Организация питания мобильного робота
Питание мобильного робота осуществляют аккумуляторные батареи, которые были взяты из уже использованных аккумуляторов ноутбуков, а так же сделана резервная батарея из использованных аккумуляторов IPhone.
В последнее время li-ion набирает популярность, так как обеспечивает необходимое напряжение и емкость. По форме она напоминает пальчиковые
AA и мизинчиковые
AAA батарейки. Напряжение на выходе – 3,7V. Типовая емкость: 2200-3000 мАч. У батарей AA и AAA напряжение 1,5V (у аккумуляторов AA и AAA – 1,2V) [9].

Рисунок 14 – LI-ION аккумулятор типа 18650
Чаще всего 18650 является li-ion аккумулятором. К преимуществам можно отнести:
- Высокая энергетическая плотность;
- Низкий саморазряд;
- Отсутствие эффекта памяти;
- Простота обслуживания;
- Низкий удельный вес.
К недостаткам можно отнести:
- Аккумуляторы Li-ion подвержены выходу из строя при перезаряде и/или перегреве. Чтобы решить эту проблему, все бытовые аккумуляторы снабжаются встроенной электронной схемой, которая не дает перезарядиться и/или перегреться вследствие заряда;
- При небережном обращении аккумуляторы могут выходить из строя чаще, чем другие типы аккумуляторов. Полный разряд
убивает
литий-ионный аккумулятор. После чего аккумулятор восстановить будет невозможно; - Оптимальные условия хранения Li-ion аккумуляторов достигаются при 40%-ом заряде от ёмкости аккумулятора при температуре около 5 градусов Цельсия. При этом низкая температура является более важным фактором для малых потерь ёмкости при долговременном хранении. Средний срок хранения (службы) литиевого АКБ составляет в среднем 36 месяцев;
- Еще одной особенностью данных аккумуляторв является старение. Литиевые аккумуляторы стареют, даже если не используются.
Применяется 18650 там, где необходима большая емкость. В нашем примере это светодиодные фонари. В левом фонаре установлена батарея AAA, в среднем батарея AA, в правом фонаре установлен светодиод CREE SST-50. Для его работы необходима большая мощность. Аккумулятор 18650 идеально подходит, именно поэтому фонарь сделан под него. Некотоые фонари устроены так, что вместо батареи 18650 можно установить переходник на 3 батареи AAA. При этом напряжение практически совпадает: 3,7В и 4,5В (=1,5В*3). При этом, конечно же, происходит потеря емкости аккумуляторной батареи. Так же необходимо отметить, что именно из этих элементов набирают аккумуляторные батареи ноутбуков.
В данном случае, мы используем аккумуляторы фирмы SANYO, таковых мы используем в размере 2-х штук. Соединены последовательно в цепь питания электропривода, в результате чего мы получаем при полном заряде ≈ 8.4В.
Для силового питания для мостовых драйверов на платформе L298n мы используем аккумуляторы фирмы SANYO, таковых мы используем в размере 4-х штук. Соединены последовательно в цепь питания электропривода, в результате чего мы получаем при полном заряде ≈16.8В.
Рассмотрим данный тип батареи:
- Модель: UR18650A (Тип питания);
- Стандартная емкость: 2250 мАч;
- Минимальная емкость: 2150 мАч;
- Стандартное напряжение: 3.7В (Зарядки – 4.25В);
- Разряд отсечки напряжения: 2.5 В;
- Максимальный зарядный ток: 2.15A;
- Максимальный ток разряда: 5А;
- Размер: 18.6*64.9;
- Вес: 44 г.

Рисунок 15 – Внешний вид источника питания данным мобильным роботом
Тематика разработки мобильных роботов была начата еще в бакалавриате. Видео-обзор на бакалаврскую работу представлен ниже:
Рисунок 16 – Работа мобильного робота (анимация: 6 кадров, 150 килобайт, 10 циклов повторения)
Выводы
На основе проведенной работы планируется:
- Распечатка платформы на 3D-принтере.
- Установка дополнительных ультразвуковых датчиков расстояния HC-SR04 для автоматической парковки.
- Полная отладка всех датчиков.
- Установка дополнительных транзисторов для отключения датчиков в целях энергосбережения.
На момент написания данного реферата магистерская работа еще не завершена. Ориентировочная дата завершения магистерской работы: июнь 2018 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Что такое мобильный робот? // GENERATION [Электронный ресурс]. – Режим доступа: http://ed.generation.kz/256..., свободный.
- Классификация мобильных роботов // helpiks.org [Электронный ресурс]. – Режим доступа: http://helpiks.org/6-11883.html, свободный.
- Dual full-bridge drive L298N // tech.dmu.ac.uk [Электронный ресурс]. – Режим доступа: http://www.tech.dmu.ac.uk/..., свободный.
- Voltage Regulator LM7806 // fairchildsemi.com [Электронный ресурс]. – Режим доступа: https://www.fairchildsemi.com/..., свободный.
- HC-05 Bluetooth to Serial Port Module // robotshop.com [Электронный ресурс]. – Режим доступа: http://www.robotshop.com/..., свободный.
- HC-SR04 Datasheet // electroschematics.com [Электронный ресурс]. – Режим доступа: http://www.electroschematics.com/..., свободный.
- TCRT5000 Datasheet // alldatasheet.com [Электронный ресурс]. – Режим доступа: http://www.alldatasheet.com/..., свободный.
- Voltage Regulators LF33CV // elcodis.com [Электронный ресурс]. – Режим доступа: http://elcodis.com/..., свободный.
- LI-ION аккумулятор типа 18650 // aliexpress.com [Электронный ресурс]. – Режим доступа: https://ru.aliexpress.com/....