
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження
- 3. Мобільний робот. Класифікація мобільних роботів
- 4. Вибір апаратної частини
- 4.1 L298 Dual H-Bridge драйвер
- 4.2 Стабілізатор напряжения LM7805
- 4.3 Стабілізатор напряжения LF33cv
- 4.4 Bluetooth-модуль HC-05
- 4.5 Ультразвуковий датчик виміру відстані HC-SR04
- 4.6 Цифровий датчик лінії TCRT5000
- 5. Експериментальна платформа мобільного робота
- 6. Організація живлення мобільного робота
- Висновки
- Перелік посилань
Вступ
Щороку на ринку робототехніки прокручується
5-6 мільярдів доларів, і ця цифра постійно зростає. Мабуть, вік накопичення знань і теоретичної науки змінюється новою епохою – коли всілякі роботи і механізми заповнюють світ
За останніми даними, сьогодні в світі працюють 1,8 млн. самих різних роботів – промислових, домашніх, роботів-іграшок. Що ж таке робот?
Робот – це електромеханічний, пневматичний, гідравлічний пристрій, програма, або їх комбінація, яка працює без участі людини і виконує дії, зазвичай здійснювані людиною. Іншими словами робот – автоматичний пристрій, що імітує рухи і дії людини. Робот побудований за комп'ютерною технологією, свідомість робота – це обчислювальна машина, з якої інформація може бути зчитана і перенесена на окремий носій. Робот не лікується, а ремонтується шляхом введення відповідних діагностичних програм.
У робота відсутнє асоціативне мислення. У нього відсутня цікавість – є лише програма по накопиченню інформації, яка йому необхідна. Робот все розуміє розумом, душевні якості йому не властиві – все-таки він не має душі.
Однак сьогодні у фахівців в області робототехніки виникають приблизно ті ж труднощі, що і 30 років тому у розробників ЕОМ. Через відсутність загальних стандартів і платформ творцям роботів доводиться починати розробку кожного нового творіння практично з нуля [1].
1. Актуальність теми
Останнім часом все більшої актуальності стали купувати процеси автоматизації всього технічного устаткування, яке застосовується у верстатах, машинах і механізмах, робототехнічних комплексах. Завдяки впровадженню у виробництво нових технологій, істотно підвищується продуктивність праці, причому частка ручної праці в порівнянні з автоматизованим значно зменшується. Підвищується технічний рівень продукції, що випускається, істотно поліпшується її якість. Все це, напевно, неможливо було б здійснити без мікропроцесорних обчислювальних засобів. Прилади, які виконані із застосуванням мікропроцесорів, мають більш високі показники в роботі в порівнянні з приладами, виконаними на окремих логічних схемах, причому вартість перших значно менше.
2. Мета і задачі дослідження
Метою магістерської роботи є створення структури мобільного робота і дослідження системи управління мобільного робота.
Основні задачі дослідження:
- Складання схеми управління мобільним роботом;
- Вибір мікроконтролера;
- Вибір апаратної частини робота;
- Аналіз отриманих результатів.
3. Мобільний робот. Класифікація мобільних роботів
Мобільний робот – автономна система, яка існує в фізичному світі, не має фіксованого місця розташування, може відчувати своє оточення і може впливати на нього, щоб досягти якихось цілей.
У сучасній робототехніки роботи визначаються як клас технічних систем, які в своїх діях відтворюють рухові і інтелектуальні функції людини. Від звичайної автоматичної системи робот відрізняється багатоцільовим призначенням, великою універсальністю, можливістю перебудови на виконання різноманітних функцій.
Роботи можна класифікувати по:
- областям застосування – виробничі (промислові), військові (бойові, що забезпечують), дослідні, медичні;
- середовищі існування (експлуатації) – наземні, підземні, надводні, підводні, повітряні, космічні;
- ступені рухливості – стаціонарні, мобільні;
- типу системи управління – програмні, адаптивні, інтелектуальні;
- функціональним призначенням – маніпуляційні, транспортні, інформаційні, комбіновані;
- рівню універсальності – спеціальні, спеціалізовані, універсальні.
Також роботи класифікуються за конструктивними ознаками:
- типу виконавчих приводів – електричні, гідравлічні, пневматичні;
- типу рушія – гусеничні, колісні, колісно-гусеничні, напівгусеничні, крокуючі, колісно-крокуючі, роторні, з петльовим, гвинтовим, водометним і реактивним рушіями;
- конструктивними особливостями технологічного обладнання – по числу маніпуляторів, за вантажопідйомністю маніпуляторів, по системі координат робочої зони (лінійна, кутова);
- типу джерел первинних сигналів – електричні, біоелектричні, акустичні [2].
4. Вибір апаратної частини
В якості об'єкта управління в даній роботі виступає розроблений мобільний робот #WallEPro. Робот складається з наступних датчиків і модулів: ультразвуковий датчик відстані HC-SR04, Bluetooth-модуль HC-05, цифровий датчик лінії TCRT5000, цифровий гіроскоп GY-50 L3G4200D, ультразвуковий сенсор Sonar-EZ1, L298 Dual H-Bridge драйвер, стабілізатори напруги LF33cv і 7805.
4.1 L298 Dual H-Bridge драйвер
L298n являє собою подвійний мостовий драйвер для управління двонаправленими навантаженнями з струмами до 2А і напругою від 4.5 В до 46 В. Мікросхема розроблена для управління реле, соленоїдами, двигунами постійного струму і кроковими двигунами. L298n має TTL сумісні входи. У L298n існує поділ електроживлення для логічної схеми і для навантаження, що дозволяє підключити навантаження з меншою або більшою напругою живлення, ніж у мікросхеми, а також зменшує перешкоди.

Рисунок 1 – Подвійний мостовий драйвер L298n
Мікросхеми L298n мають вбудований захист від перегріву. Виходи мікросхеми відключаються при нагріванні до температури близько +70°С [3].
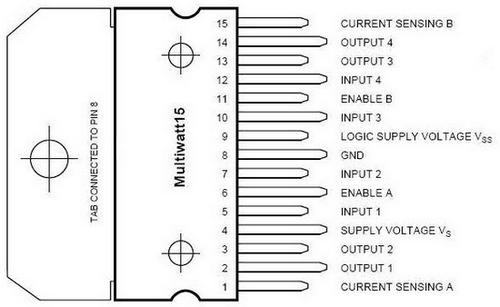
Рисунок 2 – Розташування виводів драйвера L298n
| 1 | SENS-A | Контроль струму 1 и 2 каналів |
|---|---|---|
| 2 | OUT2 | Вихід 2 каналу |
| 3 | OUT3 | Вихід 3 каналу |
| 4 | Vs | Живлення навантаження |
| 5 | IN1 | Вхід 1 каналу |
| 6 | EN-A | Дозвіл роботи 1 и 2 каналів |
| 7 | IN2 | Вхід 2 каналу |
| 8 | GND | Загальний вивод |
| 9 | Vss | Живлення логіки (+5V) |
| 10 | IN3 | Вхід 3 каналу |
| 11 | EN-B | Дозвіл роботы 3 и 4 каналів |
| 12 | IN4 | Вхід 4 каналу |
| 13 | OUT3 | Вихід 3 каналу |
| 14 | OUT4 | Вихід 4 каналу |
| 15 | SENS-B | Контроль струму 3 и 4 каналів |
| Максимальна напруга живлення Vs | 50V |
|---|---|
| Максимальна напруга живлення Vss | 7V |
| Вхідна напруга (IN, EN) | -0,3...7V |
| Напруга на входах SENS | -1V...+2,3V |
| Максимальний постійний вихідний струм | ± 2A |
| Максимальний імпульсний вихідний струм (5ms однократно) | ± 3A |
| Максимальна потужність, що розсіюється | 25W |
| Діапазон температур | -25...+130°C |
На основі datasheet до L298n була спроектована і зроблена плата драйвера. Зроблені датчики струму на одній і на іншій стороні моста драйвера. На платі встановлена індикація, яка показує напрямок руху двигуна.

Рисунок 3 – Плата драйвера L298n
4.2 Стабілізатор напруги LM7805
Класичний параметричний стабілізатор напруги 5В LM7805 в корпусі ТО-220. Перевірений часом і мільйонами аматорських і професійних конструкцій, стабілізатор незамінний в конструкціях, для яких важлива не тільки стабільність напруги, але і мінімальний рівень шумів напруги живлення. Просте підключення і мінімальна кількість додаткових зовнішніх компонентів.

Рисунок 4 – Стабілізатор напруги LM7805
Для стабільної роботи стабілізатора необхідно встановити на вході і виході по керамічному і електролітичному конденсатору ємністю 0,1мкФ і 100 мкФ на напругу не нижче напруги відповідного кола.
Характеристики стабілізатора:
- Вхідна напруга: від 7В до 25В;
- Вихідна напруга: 5В;
- Максимальный вихідний струм: 1,5А;
- Корпус: ТО-220.
Після певних тестів даного стабілізатора виникла необхідність підвищити струм. Підключивши два таких стабілізатора в паралель, ми отримали в два рази більше вихідного струму [4].
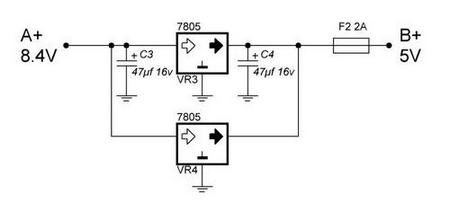
Рисунок 5 – Схема підключення стабілізаторів LM7805
4.3 Стабілізатор напруги LF33cv
Стабілізатор напруги з фіксованим виходом 3.3В. Відрізняється високою стабільністю і високим вихідним струмом в 800 мА.

Рисунок 6 – Стабілізатор напруги LF33cv
Характеристики:
- Вихідна напруга: 3.3В;
- Вихідний струм: 500 мА;
- Максимальна вхідна напруга: 16В;
- Падіння напруги: 1В (вхідна не може бути нижче ніж 3.3 + 1 = 4.3В)
- Вбудований струмовий і температурний захист;
- Корпус: TO-220;
- Виробник: STMicroelectronics
Після певних тестів даного стабілізатора виникла необхідність підвищити струм. Підключивши два таких стабілізатора в паралель, ми отримали в два рази більше вихідного струму [8].
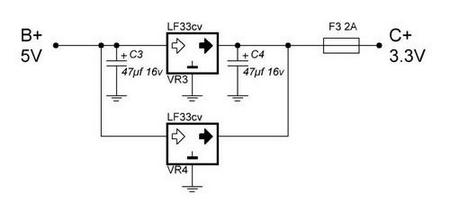
Рисунок 7 – Схема підключення стабілізаторів напруги LF33cv
4.4 Bluetooth-модуль HC-05
Bluetooth вже давно і міцно увійшов в наше життя в якості зручного протоколу зв'язку різних пристроїв: мобільних телефонів, ноутбуків, КПК, гарнітур, мишей, клавіатур... Список можна ще довго продовжувати. Зазвичай цю технологію інтегрують в свої продукти великі виробники електроніки у вигляді маленької мікросхеми в корпусі BGA або QFN. А як бути нам, простому електронному люду, які не володіютьтемними силами створення 4-шарових плат і кунг-фу мікромонтажа? Для цього є Bluetooth-модуль HC-05 від наших китайських побратимів [5].

Рисунок 8 – Bluetooth-модуль HC-05
4.5 Ультразвуковий датчик виміру відстані HC-SR04
Використовуючи ультразвукові хвилі, він вимірює відстань до об'єкта або просто виявляє перешкоду на шляху руху рухомої конструкції. На платі модуля розміщені пьєзо-випромінювач ультразвуку і мікрофон, що сприймає відбиту хвилю.На відміну від інфрачервоних далекомірів, на ультразвуковий датчик HC-SR04 не впливають джерела світла або колір перешкоди. Можуть виникнути труднощі при визначенні відстані до пухнастих або тонких об'єктів. Звертаємо увагу, що швидкість звуку в повітрі залежить від температури. Це впливає на точність датчика. Типовими областями застосування є паркувальні датчики, контролери рівня, пристрої моніторингу місцевості і інші [6].
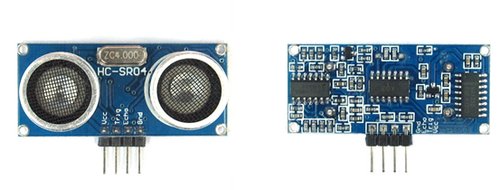
Рисунок 9 – Ультразвуковий датчик виміру відстані HC-SR04
4.6 Цифровий датчик лінії TCRT5000
Цифровий датчик лінії дозволяє визначати колір поверхні біля нього. Виходом є простий бінарний цифровий сигнал: логічний 0 або 1 в залежності від кольору, який він бачить перед собою. Одиниця – чорний або порожнеча, нуль – не чорний [7].

Рисунок 10 – Цифровий датчик лінії TCRT5000
5. Експериментальна платформа мобільного робота
Основою робота, що розроблюється, є відладочна плата STM32F4. На першому рівні робота, показаному на рисунку 12, розташовані двигуни постійного струму, два драйвера для управління двигунами, Bluetooth-модуль HC-05, цифрові датчики лінії TCRT5000, плати перетворення сигналу, ультразвукові датчики наближення HCSR04, стабілізатори напруги LF33cv і LM7805, гіроскоп. На другому рівні показаному на рисунку 13, перебуває сама відладочна плата STM32F4, а також живлення робота. Драйвера були зроблені власноруч на основі мікросхеми подобі драйверів L298N. Автономне живлення здійснюється за допомогою літій-іонних батарей взятих з ноутбука. Для безпечної роботи літій-іонних акумуляторів, оскільки вони мають вибухонебезпечності передбачені запобіжники. Надалі планується заміна корпусу робота і створення нового на 3Dпринтері.
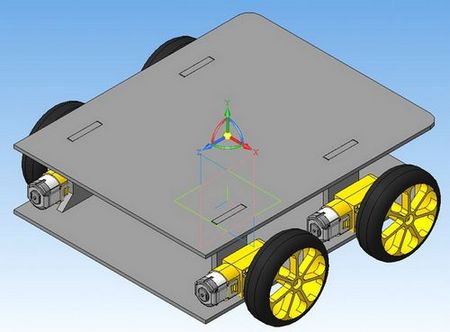
Рисунок 11 – Зразковий вид моделі робота

Рисунок 12 – Перший рівень робота

Рисунок 13 – Другий рівень робота
6. Організація живлення мобільного робота
Живлення мобільного робота здійснюють акумуляторні батареї, які були взяті з уже використаних акумуляторів ноутбуків, так само зроблена резервна батарея з використаних акумуляторів IPhone.
Останнім часом li-ion набирає популярність, так як забезпечує необхідну напругу і ємність.За формою вона нагадує пальчикові
AA і мізинчикові
AAA батарейки. Напруга на виході – 3,7V. Типова ємність: 2200-3000 мАг. У батарей AA і AAA напруга 1,5V (у акумуляторів AA і AAA –1,2V) [9].

Рисунок 14 – LI-ION акумулятор типу 18650
Найчастіше 18650 є li-ion акумулятором. До переваг можна віднести:
- Висока енергетична щільність;
- Низький саморозряд;
- Відсутність ефекту пам'яті;
- Простота обслуговування;
- Низька питома вага.
До недоліків можна віднести:
- Акумулятори Li-ion схильні до виходу з ладу приперезаряді і/або перегріві. Щоб вирішити цю проблему, всі побутові акумулятори забезпечуються вбудованою електронною схемою, яка не дає перезарядитися і/або перегрітися внаслідок заряду;
- При недбалому зверненні акумулятори можуть виходити з ладу частіше, ніж інші типи акумуляторів. Повний розряд
вбиває
літій-іонний акумулятор. Після чого акумулятор відновити буде неможливо; - Оптимальні умови зберігання Li-ion акумуляторів досягаються при 40% -му заряді від ємності акумулятора при температурі близько 5 градусів Цельсія. При цьому низька температура є більш важливим фактором для малих втрат ємності при довготривалому зберіганні. Середній термін зберігання (служби) літієвого АКБ становить в середньому 36 місяців;
- Ще однією особливістю даних аккумуляторв є старіння. Літієві акумулятори старіють, навіть якщо не використовуються.
Застосовується 18650 там, де необхідна велика ємність. У нашому прикладі це світодіодні ліхтарі. У лівому ліхтарі встановлена батарея AAA, в середньому батарея AA, в правому ліхтарі встановлений світодіод CREE SST-50. Для його роботи необхідна велика потужність. Акумулятор 18650 ідеально підходить, саме тому ліхтар зроблений під нього. Некотоие ліхтарі влаштовані так, що замість батареї 18650 можна встановити перехідник на 3 батареї AAA. При цьому напруга практично збігається: 3,7V і 4,5V (= 1,5V * 3). При цьому, звичайно ж, відбувається втрата ємності акумуляторної батареї. Так само необхідно відзначити, що саме з цих елементів набирають акумуляторні батареї ноутбуків.
В даному випадку, ми використовуємо акумулятори фірми SANYO, таких ми використовуємо в розмірі 2-х штук. З'єднані послідовно в ланцюг живлення електроприводу, в результаті чого ми отримуємо при повному заряді ≈ 8.4В.
Для силового живлення для мостових драйверів на платформі L298n ми використовуємо акумулятори фірми SANYO, таких ми використовуємо в розмірі 4-х штук. З'єднані послідовно в ланцюг живлення електроприводу, в результаті чого ми отримуємо при повному заряді ≈16.8В.
Розглянемо цей тип батареї:
- Модель: UR18650A (Тип живлення);
- Стандартна ємність: 2250 мАг;
- Мінімальна ємність: 2150 мАг;
- Стандартна напруга: 3.7В (Зарядки – 4.25В);
- Розряд відсічення напруги: 2.5 В;
- Максимальний зарядний струм: 2.15A;
- Максимальний струм розряду: 5А;
- Розмір: 18.6*64.9;
- Вага: 44 г.

Рисунок 15 – Зовнішній вигляд джерела живлення даним мобільним роботом
Тематика розробки мобільних роботів була розпочата ще в бакалавраті. Відео-огляд на бакалаврську роботу представлений нижче:
Рисунок 16 – Робота мобільного робота (анімація: 6 кадрів, 150 кілобайт, 10 циклів повтору)
Висновки
На основі проведеної роботи планується:
- Роздрукування платформи на 3D-принтері.
- Встановлення додаткових ультразвукових датчиків відстані HC-SR04 для автоматичного паркування.
- Повна відладка всіх датчиків.
- Встановлення додаткових транзисторів для відключення датчиків з метою енергозбереження.
На момент написання даного реферату магістерська робота ще не завершена. Орієнтовна дата завершення магістерської роботи: червень 2018 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Что такое мобильный робот? // GENERATION [Электронный ресурс]. – Режим доступа: http://ed.generation.kz/256..., свободный.
- Классификация мобильных роботов // helpiks.org [Электронный ресурс]. – Режим доступа: http://helpiks.org/6-11883.html, свободный.
- Dual full-bridge drive L298N // tech.dmu.ac.uk [Электронный ресурс]. – Режим доступа: http://www.tech.dmu.ac.uk/..., свободный.
- Voltage Regulator LM7806 // fairchildsemi.com [Электронный ресурс]. – Режим доступа: https://www.fairchildsemi.com/..., свободный.
- HC-05 Bluetooth to Serial Port Module // robotshop.com [Электронный ресурс]. – Режим доступа: http://www.robotshop.com/..., свободный.
- HC-SR04 Datasheet // electroschematics.com [Электронный ресурс]. – Режим доступа: http://www.electroschematics.com/..., свободный.
- TCRT5000 Datasheet // alldatasheet.com [Электронный ресурс]. – Режим доступа: http://www.alldatasheet.com/..., свободный.
- Voltage Regulators LF33CV // elcodis.com [Электронный ресурс]. – Режим доступа: http://elcodis.com/..., свободный.
- LI-ION аккумулятор типа 18650 // aliexpress.com [Электронный ресурс]. – Режим доступа: https://ru.aliexpress.com/....