
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження, заплановані результати
- 3. Огляд електромеханічних крісел
- 3.1. Зарубіжні виробники електромеханічних інвалідних крісел
- 3.2. Вітчизняні виробники електромеханічних інвалідних крісел
- 3.3. Електромеханічне інвалідне крісло-коляска Invacare Strom XS
- 4. Розробка апаратної частини
- 5. Розробка програмної частини
- Список джерел
Вступ
Серед виробів, призначених для людей з обмеженими фізичними можливостями, в особливий клас виділяють технічні засоби, що компенсують порушення опорно-рухової системи людини, наприклад, тростини, милиці, протези нижніх кінцівок, крісла-каталки і крісла-коляски. Крісло-коляска, на відміну від крісла-каталки, призначене для управління інвалідом самостійно, а не супроводжуючою особою. Крісла-коляски можуть мати механічний привід, при якому колеса приводяться в рух силою рук, а також електричний привід, до складу якого входять: акумулятор, силовий перетворювач, мікроконтролер, пристрій вводу і редуктор.
Такі інвалідні крісла призначені для пересування не тільки в приміщенні, але і на вулиці, тому важливо, щоб в мікроконтролер була закладена зручна і надійна система управління, що також передбачає відсутність датчика швидкості.
1. Актуальність теми
Проблема допомоги людям з обмеженими фізичними здібностями залишається однією з найскладніших, що вимагають від суспільства не тільки її розуміння, але і участі в цьому процесі багатьох спеціалізованих установ і структур. Реабілітацією інвалідів є не тільки лікування і покращення стану здоров'я, але і процес досягнення людиною максимальної самостійності в суспільстві. Одними з пристосувань, що найбільшим чином сприяють цьому, є протези кінцівок і електромеханічні інвалідні крісла.
2. Мета і задачі дослідження, заплановані результати
Метою магістерської роботи є вивчення існуючих інвалідних крісел-колясок з електроприводом і розробка системи керування електроприводом для електромеханічного інвалідного крісла-коляски Invacare Storm XS.
Для досягнення поставленої мети необхідно вирішити такі завдання:
- Вивчити існуючі системи електроприводів на сучасних інвалідних кріслах-колясках з електроприводом;
- Вибрати апаратні складові системи (контролер, силовий перетворювач, датчики, пристрій вводу);
- Розробити математичну модель системи регулювання швидкості крісла-коляски;
- Розробити виконувану програму для контролера;
- Перевірити працездатність реалізованої системи.
Заплановані результати:
- Математична модель системи регулювання швидкості електромеханічної інвалідного крісла;
- Робоча система електроприводу в інвалідному електромеханічному кріслі-колясці Invacare Storm XS.
3. Огляд електромеханічних крісел
Електромеханічне крісло-коляска (ЕМК) призначене для самостійного пересування в приміщенні і на вулиці інвалідів з порушенням функцій верхніх і нижніх кінцівок. Воно приводиться в рух електроприводом. ЕМК може бути доповнено такими різними функціями, як нахил всього крісла, нахил спинки, підйом сидіння і іншими корисними або необхідними для здоров'я функціями.
Коляски з електроприводом класифікують по ведучим колесам: з задньої, передньої, центральної осями або всіма чотирма ведучими колесами. Кожен тип має свої характеристиками руху. Також ЕМК відрізняються типом сидіння: одні виглядають як звичайні сидіння інвалідних колясок, а інші схожі на автомобільні сидіння.
Конструкція ЕМК має широкий спектр моделей, від маленьких переносних колясок, які можуть бути складені або розібрані, до дуже великих і важких з повним набором функцій (такі зазвичай називають реабілітаційними кріслами).
Користувач зазвичай керує швидкістю і напрямком за допомогою джойстика, підключеного до контролера і розташованого на одному з підлокітників в залежності від того, якою рукою людині краще управляти коляскою. У разі неможливості управління за допомогою рук, можуть використовуватися інші пристрої вводу, наприклад, пристрій для управління коляскою за допомогою підборіддя.
Спочатку інвалідні крісла розроблялися без урахування можливості їх транспортування, тому було дуже важко їх розбирати. На сьогоднішній день, багато ЕМК транспортабельні, а деякі дуже прості в розбиранні. Зі зростаючими запитами користувачів з'явилися ЕМК однаково пристосовані як для вуличного використання, так і для домашнього.
3.1. Зарубіжні виробники електромеханічних інвалідних крісел
Найбільшими зарубіжними виробниками електромеханічних інвалідних крісел вважаються Invacare Corp., Permobil AB і Pride Mobility Products Corp.
Invacare – найбільша компанія з виробництва медичної техніки та реабілітаційного обладнання у всьому світі. Якість продукції та її відповідність конкретним вимогам людей з обмеженими можливостями дозволили компанії посісти лідируючі позиції на багатьох ринках.
Invacare має широку лінійку інвалідних колясок з ручним і електричним управлінням. Їхня продукція характеризується функціональністю, якістю, надійністю і безпекою. Invacare не раз удостоювалася нагородами за дослідницьку та інноваційну діяльність.

Електричні коляски Invacare працюють за рахунок акумуляторних батарей і здатні долати від 23 до 42 км, в залежності від моделі та додаткових опцій. Акумулятори заряджаються від звичайної розетки. За витратою батарей дозволяє стежити світлодіодний індикатор заряду.
Висота перешкод, подоланих електричними візками Invacare варіюється від 10 до 60 мм (коляска підвищеної прохідності). Швидкість пересування від 6 до 10 км/год, але при цьому важливо пам'ятати, що гальмівний шлях коляски становить 1 м, що особливо актуально при домашньому використанні. Слід ретельно стежити за зарядом батарей, це можна робити за допомогою спеціального світлодіода, розташованого біля кнопки включення. Коли заряд скінчиться, коляску можна використовувати як транзитну. Мінімальний радіус розвороту надає кріслу-колясці маневреність і прохідність.
Більше 45 років компанія Permobil займає одне з лідируючих позицій в індустрії електромеханічних крісел. Ця компанія характеризується великою кількістю інновацій і впливом в розвитку рішень для інвалідів.
Вироблені компанією інвалідні крісла з електроприводом поділяються на дві великі групи: для вуличного користування і для домашнього. Їхня продукція для вуличного використання сильно відрізняється від звичайних електричних крісел. Ці потужні електромеханічні крісла можуть безпечно доставити користувача далеко від рівної дороги. Вони оснащені потужними електродвигунами, енергоємкою підвіскою і об'ємними акумуляторами, що забезпечує користувачеві тривалу і плавну поїздку на швидкості до 15 км/год. Система поліпшеного управління (Enhanced Steering Perfomance) робить вуличні моделі інвалідних крісел Permobil одними з кращих для руху як по дорозі, так і поза нею.

Подібні моделі можуть перевозити людей вагою до 136 кг, можуть проходити від 30 до 45 км від одного заряду при максимальній швидкості до 15 км/год. Також вони можуть долати перешкоди заввишки до 110 мм і мають радіус розвороту 1680 мм. Для комфорту користувача крісло має систему нахилу крісла цілком і окремо сидіння і спинки.
Моделі для домашнього користування більш маневрені. Комбінація зручності користування, сучасного дизайну і комфорту робить ці моделі придатними не тільки для домашнього користування, а й для вуличного використання на рівному дорожньому покритті. Ними легко керувати в замкнутих просторах, а потужні двигуни в поєднанні з просунутою базою дають електрокріслу хорошу продуктивність на вулиці. Такі моделі є універсальним вибіром для більшості випадків.
Pride Mobility Products є одним з провідних в світі розробників і виробників мобільних засобів пересування для малорухомих людей. Продукти цієї компанії ретельно спроектовані і випробувані, містять технологічно інноваційні функції для зручності користувача.
Електроколяски цієї компанії мають невелику вагу і дуже високу маневреність, що робить їх зручними для повсякденного використання як всередині приміщення, так і на вулиці на рівному покритті.

Jazzy Select 6 забезпечує максимальну стабільність в поєднанні з перевагами переднього приводу. Підвіска Active-Trac і 6-дюймові передні і задні колеса забезпечують відмінну продуктивність в закритому приміщенні і на вулиці. Широкий вибір стандартних зручних функцій роблять цю інвалідну коляску простою для використання.
3.2. Вітчизняні виробники електромеханічних інвалідних крісел
Серед вітчизняних виробників не такий великий вибір інвалідних крісел з електроприводом. Найбільшими вітчизняними виробниками таких крісел є компанії Мега-Оптим
і Ортоніка
.
Компанія Мега-Оптим
є визнаним російським виробником і постачальником технічних засобів реабілітації інвалідів. Серед пропонованих товарів переважають невеликі інвалідні крісла, що складаються, з електроприводом, розраховані для пересування як в приміщенні, так і на вулиці. Вони оснащені відкидними підлокітниками, амортизаторами і антиперекидувачами. Деякі моделі забезпечені вертикалізаторами, а деякі навпаки можуть приймати горизонтальне положення. Однак мінусом цих електрокресел є їх відносно велика вага (від 40 до 65 кг), що знижує їх вантажопідйомність і дальність ходу від одного заряду.
В основу створення компанії Ортоніка
лягла ідея забезпечення комфортного середовища для людей, що мають особливі потреби. Кожен їх виріб проходить довгий період розробки, тестові випробування і відповідає російським стандартам якості. Їхні вироби відрізняються від електроколясок Мега-Оптим
більш сучасних дизайном і присутністю в деяких моделях приводом передньої осі, а не задньої.

Ortonica
Також вони мають більш високу вантажопідйомність і більший запас ходу від одного заряду, проте розвивають швидкість до 5 км/год, що нижче, ніж у більшості моделей інших виробників. Вони можуть проходити перешкоди висотою до 5 см і забезпечуються ременями безпеки, що робить їх добре пристосованими для вуличного використання.
Цікавою розробкою для інвалідних крісел активного типу є пристрій Una Wheel (рисунок 5), що дозволяє прикріпити до інвалідного крісла приводне колесо.

Пристрій Una Wheel являє собою мотор-колесо потужністю 350 Вт, рама якого кріпиться до інвалідного крісла спереду. Воно підходить для більшості крісел-колясок активного типу (з незнімними підніжками). Монтаж не вимагає допомоги асистента і займає близько 30 секунд. Невелика вага в сукупності з ємкою акумуляторною батареєю дозволяє проїхати до 35 км на одному заряді при масі користувача до 100 кг.
3.3. Електромеханічне інвалідне крісло-коляска Invacare Strom XS
Метою дипломної роботи є розробка системи управління електричним інвалідним кріслом Storm XS компанії Invacare (рисунок 6). Це одна з перших моделей серії. Це крісло-коляска комбінованого типу (підходить як для пересування в закритому приміщенні, так і для вуличного використання) з індивідуальним приводом задніх коліс.

В якості приводних двигунів використовуються колекторні мотори-редуктори GP8040SB-SRG1 постійного струму потужністю 350 Вт з номінальною напругою 24 В, номінальним струмом 14 А і номінальною швидкістю 4000 об/хв. Передавальне число редуктора ставляє 25,1, а діаметр ведучих коліс складає 36 см. В комплекті є дві акумуляторні батареї номінальною напругою 12 В кожна і ємкістю 40 А⋅год. Це крісло-коляска зручно тим, що підлокітники і підніжка регулюються по висоті, також є амортизація задніх коліс. До двигунів прикріплені електромагнітні гальма з номінальним зусиллям 2,2 Н⋅м. Вага крісла-коляски становить близько 70 кг без акумуляторів і 103 кг з акумуляторами. Номінальна вантажопідйомність – 110 кг.
4. Розробка апаратної частини
Для реалізації системи управління наявним електромеханічним інвалідним кріслом-коляскою, необхідно доповнити систему відсутніми елементами: мікроконтролером, пристроєм вводу і силовою частиною (драйвером для H-моста). Також для забезпечення хорошої якості управління, необхідно доповнити систему датчиками струму і швидкості для їх регулювання. Регулювання струму забезпечить якісні перехідні процеси і обмеження струму, що призведе до більш повільного розряду акумуляторів. Регулювання швидкості забезпечить синхронізацію швидкостей коліс при нерівномірному навантаженні на них і плавні пуск і гальмування крісла-коляски.
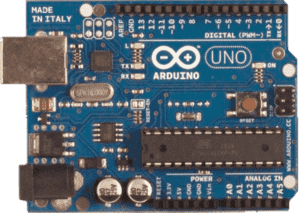
У якості мікроконтролера було обрано мікроконтролер Arduino Uno R3, показаний на рисунку 7. У його склад входять: 14 цифрових входів/виходів (з них 6 можуть використовуватися в якості ШІМ-виходів), 6 аналогових входів, кварцовий резонатор на 16 МГц, роз'єм USB , роз'єм живлення і кнопка скидання. Для початку роботи з пристроєм досить просто подати живлення від AC/DC-адаптера або батарейки, або підключити його до комп'ютера за допомогою USB-кабелю. Тактової частоти 16 МГц цілком вистачить для обчислювальних операцій робочого алгоритму, а кількості входів/виходів досить для підключення всіх необхідних периферійних пристроїв, що в сукупності з невисокою вартістю плати, робить цей мікроконтролер хорошим вибором для дипломної роботи.
В якості пристрою вводу було встановлено двовісний джойстик KY-023, що має два 5 В аналогових виходу (по одному на вісь) і один цифровий вихід для тактової кнопки. Даний джойстик простий в підключенні і зручний у використанні.
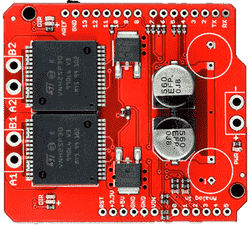
В якості силового перетворювача була обрана плата Monster Moto Sheild VNH2SP30 (рисунок 8), де VNH2SP30 – це назва мостового драйвера для потужних колекторних двигунів постійного струму. Цей драйвер розрахований на двигуни з номінальною напругою до 41 В та струмом до 30 А. Як ключі в ньому використовуються транзистори типу MOSFET виробництва STMicroelectronics, шо підтримують управління за допомогою ШІМ частотою до 20 кГц. Особливістю таких драйверів є наявність вбудованого датчика струму, виходом якого є струмовий сигнал, пропорційний струму двигуна. Сама плата спеціально розроблена для Arduino Uno, що значно спрощує її використання в даному випадку.
В якості датчика струму планувалося використовувати вбудований в драйвер датчик, проте через виробничий брак лише один драйвер має робочий датчик струму, тому було прийнято рішення використовувати зовнішні датчики струму ACS758. Обрана модель LCB-050B є біполярним датчиком, може вимірювати до 50 А і має на виході сигнал напруги 40 мВ/А. Оскільки датчик біполярний, необхідно зауважити, що вихідний сигнал при нульовому струмі дорівнює половині напруги живлення і від цього значення буде відбуватися відлік. Був обраний саме цей датчик, тому що він простий у використанні, є біполярним і покриває весь необхідний діапазон струмів.
Для створення двухконтурної системи регулювання швидкості не обійтися без вимірювання швидкості двигуна, однак можливості підключення датчика швидкості немає, тому було прийнято рішення використовувати непряме вимірювання швидкості через ЕРС двигуна. Цей метод не вимагає великої кількості підключень, має нескладний алгоритм, однак накладає деякі обмеження на систему. Оскільки вимірювання ЕРС можливо тільки при закритих транзисторах верхнього плеча, кут відкриття ШІМ не може становити 100%, щоб забезпечити можливість отримання величини ЕРС. Це дещо знизить максимальну швидкість (близько 2%), однак метод дасть необхідну точність обчислення швидкості двигуна при достатній частоті ШІМ.
Розробка програмної частини
В якості системи управління електроприводом було обрано двоконтурну систему управління швидкістю зі зворотним зв'язком через ЕРС двигуна. Використання контура струму дозволить обмежити величину струму, що убезпечить елементи плати, а також зменшить швидкість розряду акумуляторів. Контур швидкості дозволить користувачеві легко управляти рухом крісла-коляски, забезпечить плавність режимів пуску і гальмування, а також прибирає необхідність в реалізації синхронізації швидкостей коліс, що було б одним з найважливіших пунктів при розімкнутій системі. Функціональна схема системи представлена на рисунку 9. На ній представлені наступні блоки: ЗІ – задатчик інтенсивності; РЕ – пропорційно-інтегрально-диференціальний регулятор ЕРС; РС – пропорційно-інтегральний регулятор струму; АКБ – акумуляторна батарея; ДС – датчик струму; ДН – датчик напруги; ОШ – обчислювач швидкості.
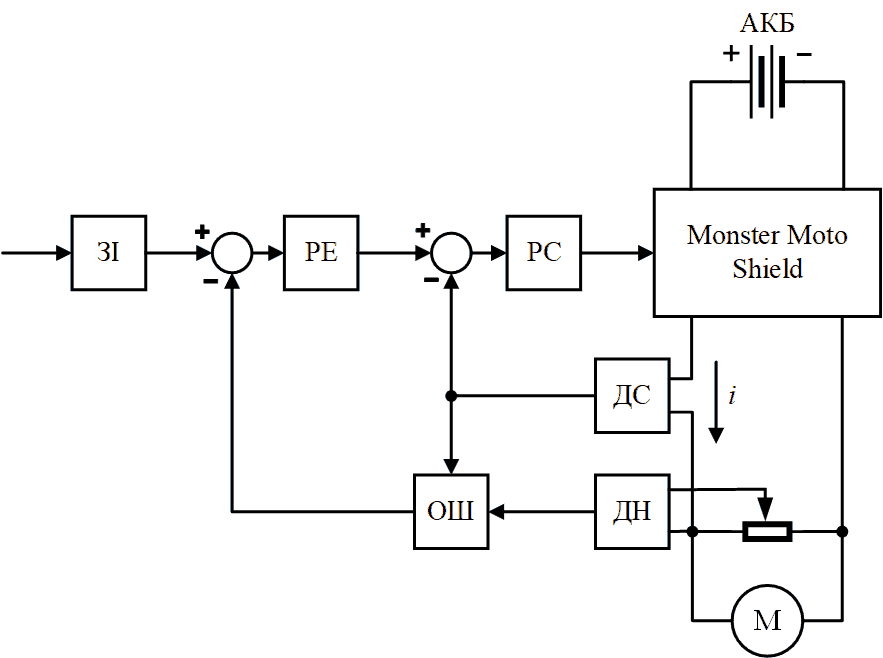
На задатчик інтенсивності приходить сигнал завдання швидкості з пристрою завдання, в даному випадку це двовісний джойстик. Задатчик інтенсивності необхідний для забезпечення плавних режимів пуску і гальмування двигуна. Від сигналу задатчика інтенсивності віднімається обчислений сигнал швидкості. Процес обчислення швидкості через ЕРС описаний нижче. Сигнал неузгодженості подається на ПІД-регулятор ЕРС, виходом якого є сигнал завдання струму. Від нього віднімається сигнал струму, отриманий з датчика струму, і отримане значення подається на ПІ-регулятор струму. Виходом регулятора струму буде сигнал управління ШІМ, який подається на силовий перетворювач Monster Moto Shield.
Процес обчислення швидкості через ЕРС двигуна виходить з рівнянь (1) і (2).
 |
(1) | |
 |
(2) |
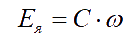
де U – напруга живлення, В; Eя – ЕРС двигуна, В; Iя – струм якоря двигуна, А; RΣ – сумарний опір якоря, Ом; C – конструктивна стала двигуна; ω – кутова швидкість обертання двигуна, рад/с.
Для обчислення конструктивної постійної двигуна, необхідно спочатку обчислити номінальну ЕРС двигуна. Коли ротор двигуна обертається, ЕРС, що наводиться в обмотці, працює проти напруги живлення, також потрібно враховувати падіння напруги на обмотці. Таким чином, номінальну ЕРС можна обчислити за формулою (3).
 |
(3) |
Після цього, використовуючи формулу (2), можна обчислити конструктивну постійну двигуна, C. Далі, знаючи конструктивну постійну, можна обчислити швидкість двигуна, вимірявши ЕРС, знявши значення напруги з клем двигуна, коли ключі верхнього плеча драйвера закриті і віднявши від цього значення падіння напруги на обмотці і помноживши отримане значення на конструктивну постійну.
Особливістю такого методу є те, що знімати напругу з обмоток для визначення ЕРС двигуна потрібно тільки в ті моменти, коли на нього не подається напруга, тобто, коли ключі напівпровідників верхніх плечей H-моста знаходяться в закритому стані. Це дещо ускладнює алгоритм управління тим, що необхідно синхронізувати роботу АЦП мікроконтролера з ШІМ-сигналом, що подається на ключі. Також, такий підхід до управління швидкістю накладає деякі обмеження на ШІМ-сигнал:
- Кут відкриття ШІМ не може становити 100%, щоб дати можливість заміряти величину ЕРС двигуна;
- Частота ШІМ повинна бути не менше 2 кГц, щоб забезпечити достатню точність обчислення швидкості.
Також необхідно врахувати, що вимірювана ЕРС двигуна є сигналом напруги і після проходження подільника напруги стане значним вплив шумів на цей сигнал. Щоб позбутися від шумів, тим самим покращивши якість регулювання, необхідно встановити RC-ланцюг паралельно напрузі, що знімається. Вона буде служити фільтром низьких частот. Частоту зрізу рекомендується налаштовувати в такому випадку на 700-1000 Гц, вибравши відповідним чином значення опору резистора і ємкості конденсатора.
Для підвищення точності обчислення швидкості можна використовувати середнє значення обчисленої швидкості за декілька періодів ШІМ. Це важливо при використанні ПІД-регуляторів швидкості.
Список джерел
- Electric Wheelchairs: Types & Reviews of Powerchairs. Режим доступа:
Disabled World
- Инвалидная коляска. Материал из Википедии – свободной энциклопедии. Режим доступа:
ru.wikipedia.org
- Инвалидные коляски и пути их совершенствования. Режим доступа:
www.metodolog.ru
- Оффициальный дистрибьютор Invacare в Украине. Режим доступа:
invacare.kiev.ua
- Permobil General Product Info. Режим доступа:
www.permobil.com
- Официальный дилер завода по разработке и сборке американских мобильных скутеров Pride Mobility для малоподвижных людей в России. Режим доступа:
mobilityscooter.ru
- Компания
Мега-Оптим
– технические средства реабилитации. Режим доступа:www.mega-optim.ru
- Компания
Ортоника
– технические средства реабилитации. Режим доступа:store.ortonica.ru
- Микроконтроллер Arduino Uno, общие сведения. Режим доступа:
arduino.ua
- Ипанов Дмитрий Александрович –
Компенсация и облегчение воздействия сопровождающего лица при управлении инвалидным креслом с электроприводом
– Реферат по теме магистерской работы. Режим доступа:masters.donntu.ru
- VNH2SP30-E Driver Data Sheet. Режим доступа:
www.pololu.com
- ACS758xCB Current Sensor Data Sheet. Режим доступа:
www.allegromicro.com
- AB-021: Measuring RPM From Back EMF. Режим доступа:
www.precisionmicrodrives.com
- Сайт компании UNA Wheel. Режим доступа:
unawheel.ru
- Усольцев А.А. Общая электротехника: Учебное пособие. – СПб: СПбГУ ИТМО, 2009. – 301 с.
- Анучин А.С. Системы управления электроприводов: учебник для вузов. – М.: Издательский дом МЭИ, 2015. – 373 с.