
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор исследований и разработок
- 3.1 Обзор международных источников
- 3.2 Обзор национальных источников
- 3.3 Обзор локальных источников
- 4. Автоматная модель
- 5. Теоретические результаты
- Выводы
- Список источников
Введение
Конечные автоматы (КА) представляют интерес для исследования и применения на практике. Простым языком, КА – это некая абстрактная модель, имеющая конечное количество состояний. Данная модель предназначена для описания и анализа поведения разнообразных устройств дискретного действия или протекания процессов дискретной обработки информации, для моделирования и построения устройств и процессов [1]. В свою очередь эти устройства и процессы могут претерпевать изменения, обусловленные внешними факторами. В ряде случаев такое воздействие приводит к изменению поведения автомата. Подобные изменения можно рассматривать как процесс переброски дуг в автомате. Практическую ценность будут представлять переброски, при которых поведение автомата сохранится. В случае с автоматами-распознавателями это будут автоматы, которые принимают тот же язык, что и исходный автомат после проведения ряда преобразований. В данной работе будет рассмотрена возможность переброски дуг в автомате-акцепторе с сохранением его поведения.
1. Актуальность темы
Конечные автоматы являются уникальной моделью представления потока выполнения каких-либо команд. Такая модель успешно используется как в технике (проектирование вычислительных машин, систем управления и связи), так и в других областях деятельности человека – теории и практике административного управления, лингвистике (анализ синтаксиса формального языка, расшифровка древних рукописей) и т. д. Универсальность теории автоматов позволяет рассматривать с единой точки зрения различные объекты, учитывать связи и аналогии между ними, переносить результаты из одной области в другую [1].
Конечные автоматы имеют широкий диапазон использования. Теория автоматов применяется в компьютерных играх при написании искусственного интеллекта для персонажа [2]. Автоматы используют в системах подготовки и редакции текстов [3], в разработке управляющих программных систем [4], при программировании мобильных устройств [5], для тестирования программных решений [6].
Широко используются конечные автоматы в криптографии: в построении криптосистем и в качестве компонент криптоалгоритмов [7]. В частности, применяются КА в поточных и автоматных шифросистемах, в симметричных шифрах и криптосистемах с открытым ключом [8].
Таким образом, исследование автоматов является актуальной задачей и может впоследствии найти широкое применение в различных областях.
2. Цель и задачи исследования, планируемые результаты
Объектом исследования является поведение приведенного автомата-распознавателя при переброске дуг.
Предметом исследования выступает нахождение условий, при которых автомат после переброски k дуг принимает тот же язык, что и исходный – автомат-эталон.
Цель: разработка и исследование метода анализа автоматов-распознавателей, порождаемых локальными преобразованиями эталона.
Основные задачи исследования:
- Провести анализ поведения автомата-распознавателя при переброске k дуг, k ≥ 1.
- Систематизировать полученные в ходе решения практических примеров результаты.
- Найти закономерности, при которых возможна или не возможна переброска k дуг с сохранением поведения автомата.
- Сделать выводы и описать класс автоматов, допускающих переброску дуг с сохранением эквивалентности.
3. Обзор исследований и разработок
3.1 Обзор международных источников
Анализ и исследование структуры автоматов со схожим поведением являются весьма распространенными явлениями, и проводятся давно. Эти задачи относятся к экспериментальной теории с автоматами, которая тщательно изложена в книге А. Гилла Введение в теорию конечных автоматов
[9]. Гилл предложил рассматривать автомат, как чёрный ящик, а задачу распознавания автомата, как задачу определения для черного ящика вход-выходных характеристик при помощи измерений на его внешних выходах.
Основные положения теории экспериментов над автоматами были описаны Эдвардом Муром [10]. Он внес большой вклад в развитие методов исследования КА, впервые предложив алгоритм распознавания эквивалентных автоматов.
В частности, теорию экспериментов освещают работы Р. Брауэра [11], П. Штарке [12], Ф. Хенни [13] и многих других авторов.
3.2 Обзор национальных источников
На национальном уровне исследование автоматов и их поведения с помощью экспериментов было рассмотрено М.П. Василевским [14], Н.В. Евтушенко, А.Ф. Петренко [15-18], В.Б. Кудрявцевым, И.С. Грунским, В.А. Козловским [19-28], В.А. Буевичем, Н.Г. Каландарашвили, А.А. Талем [29, 30].
Вышеперечисленные работы охватывают три основных этапа исследования поведения КА: сложностной, комбинаторный и характеризационный.
Комбинаторный тип основывается на выборе средств анализа и методов проведения экспериментальных исследований автоматов.
Сложностной включает построение алгоритмов необходимой сложности для анализа поведения автоматов, а также расчёт сложности экспериментов над автоматами. Отсюда возникла потребность исследования этапов экспериментов. М.П. Василевский [14] реализовал данную задачу путем внедрения некоторых последовательностей во входные слова с целью выявления внутренних состояний автомата, исследуя реакции исходного автомата на данные последовательности. И.С. Грунский назвал эти последовательности и реакции на них идентификаторами состояний, занялся их систематическим изучением и обнаружил существование идентификаторов других ненаблюдаемых компонент поведения (например, входных последовательностей [22].
На характеризационном этапе рассматриваются частные случаи контрольных и распознающих экспериментов при условии, что такие эксперименты заведомо существуют. Этот этап ознаменовался выведением В.А. Козловским первых характеризационных теорем [26].
3.3 Обзор локальных источников
Исследование поведения автоматов при переброске на локальном уровне было проведено О.М. Копытовой [31-33], а также О.С. Швец [34] и Е.И. Бурлаевой [35] в рамках выполнения магистерских работ.
Для приведенных автоматов Мили были получены следующие результаты:
- при переброске только одной дуги в приведенном автомате его поведение всегда изменяется – автомат становится неизоморфным (неэквивалентным) исходному КА;
- существуют автоматы, для которых переброска двух дуг приводит к автомату, эквивалентному эталону;
- для любого натурального k > 1 существует приведенный автомат, допускающий переброску k дуг с сохранением поведения автомата;
- найдены достаточные условия изоморфизма автоматов при переброске двух дуг;
- показана возможность переброски любого числа дуг ≥ 2 в не сильно связных автоматах;
- существуют примеры сильно связных автоматов, в которых возможно перебросить ≥ 4–х дуг и при этом получить КА, изоморфный исходному.
4. Автоматная модель
В данной работе рассматривается автомат-распознаватель. Это такой автомат, который позволяет определить принадлежность цепочки символов некоторому языку. Задача распознавателя заключается в том, чтобы на основании исходной цепочки дать ответ, принадлежит ли она заданному языку или нет.
По видам устройства управления автоматы делятся на:
- детерминированные – для каждой допустимой конфигурации распознавателя, которая возникла на некотором шаге его работы, существует единственно возможная конфигурация, в которую распознаватель перейдет на следующем шаге работы;
- недетерминированные – чтобы распознаватель был назван недетерминированным, достаточно иметь хотя бы одну конфигурацию, допускающую существование некоторого множества конфигураций, возможных на следующем шаге работы.
Нами будут рассматриваться детерминированные автоматы. Дадим определение такого КА.
Детерминированным конечным автоматом-распознавателем называется устройство или алгоритм A = ( S, X, δ, s0, F ) где S – непустое конечное множество состояний, X – конечный входной алфавит, s0 ∈ S – начальное состояние, δ – функция переходов, F ⊆ S – множество заключительных состояний.
В дальнейшем под автоматом будем понимать приведенный детерминированный акцептор.
Два состояния a и b одного и того же автомата A или двух разных автоматов, соответственно A и B, называются эквивалентными, если для всякого входного слова р ∈ X* одновременно выполняется либо
либо
С каждым состоянием а ассоциируется язык L(а), состоящий из множества слов в алфавите X, которые переводят состояние а в одно из заключительных состояний:

Из определения эквивалентности состояний a и b следует: L(a) = L(b). Автомат называется приведенным, если все его состояния попарно неэквивалентны, то есть для ∀ a, b: L(a) ≠ L(b) [3].
Проводить анализ переброски дуг в автомате будем поэтапно:
- рассмотрим переброску одной дуги эталона;
- изучим поведение автомата при переброске двух дуг;
- перебросим k дуг, k > 2.
5. Теоретические результаты
В ходе выполнения практических примеров было обнаружено, что переброска одной дуги в автомате-распознавателе с сохранением эквивалентности невозможна.
Рассмотрим некоторое преобразование. Выберем в исходном автомате А дугу (а, х, b). Заменим на дугу (а, х, g) так, чтобы g ≠ b и g ∈ SA. То есть получили новый автомат из автомата-эталона путем переброски дуги (а, х, b) в состояние g.
Теорема 1. Переброска одной дуги в приведенном автомате-распознавателе приводит к неизоморфному автомату.
Доказательство. Пусть автомат В получили вследствие переброски дуги (а, х, b) в состояние g. Покажем, что А не эквивалентен В. Чтобы различать состояния автомата-эталона и состояния автомата, полученного переброской дуги, будем возле состояний последнего ставить штрих: s ∈ SA и s' ∈ SB соответственно. Будем называть эти состояния двойственными.
Построим автомат C = ( SC, X, δC, s0s0', F ∪ F' ), который равен сумме автоматов А и В. Если А эквивалентен В, то в автомате С есть п пар эквивалентных состояний. Каждая пара таких состояний включает одно состояние из A и одно состояние из В. Покажем, что эти автоматы не эквиваленты с помощью Рk-таблиц, составленных для автомата С. При построении проверяем каждый класс эквивалентности: совпадает ли количество состояний автомата В и эталона.
Так как таблица переходов A идентична таблице переходов В, то в таблице P1 число состояний эталона в каждом классе равно числу состояний автомата В соответственно. Это связано с тем, что каждый класс содержит двойственные состояния s и s'. Любая пара (s, s'), где s ≠ a, по любому х переходит в другую пару двойственных состояний. Для пары (а, а') в автомате С данный переход не выполняется, потому что δC (а, х') = b и δC (а', х') = g'. То есть, пока состояние а k-эквивалентно состоянию а', то любая пара s, s', при условии, что s ≠ a, (k + 1)-эквивалентна.
В то же время пара a, a' k-эквивалентна, пока b (k – 1)-эквивалентно g'. Если b, g' (k – 1)-эквивалентны, то пары (а, а'), (b, b'), (g, g') k-эквивалентны. Это значит, что состояния b, b', g, g' принадлежат одному классу эквивалентности Рk–1-таблицы.
Исходя из того, что автомат А является приведенным и имеет п состояний, то состояния b и g для некоторого i ≤ п – 1 будут (i – 1)-эквивалентны, но вместе с тем i-различимы. То есть, b и g будут i-различимы, а состояния а и а' будут в некотором классе К таблицы Рi. В таблице Рi+1 класс К распадется таким образом, что состояния а и а' в результате войдут в разные классы. Оставшиеся состояния класса К со своими двойственными состояниями войдут в другие классы Рi+1-таблицы. Следовательно, в классе таблицы Рi+1, содержащем а, будет на одно состояние автомата А больше, чем состояний В. В таком случае итоговая Рn–1-таблица будет включать класс с этими же свойствами. Таким образом, автоматы А и В не являются эквивалентными.
Также было обнаружено, что ∃ переброска k-дуг эталона при условии, что k ≥ 3, которая приводит к сохранению поведения автомата, т.е. в результате получается автомат, эквивалентный исходному
Теорема 2. Для любого k ≥ 3 существует автомат-распознаватель, допускающий переброску k-дуг.
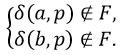
Доказательство. Построим приведенный акцептор, содержащий n > 3 состояний, с одним входным и одним заключительным состоянием. По единице каждое состояние переходит само в себя. По нулю – переходит в состояние i + 1. Первое состояние – входное, n-ое состояние – заключительное (по нулю тоже переходит само в себя).
На рисунке 1 представлен автомат-распознаватель.
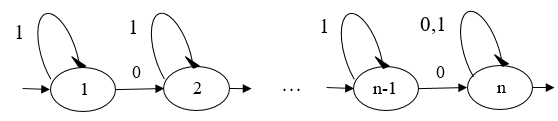
Рисунок 1 – Общий вид акцептора
Покажем, что автомат приведенный. Возьмем два состояния i и j, где n – 1 > i ≥ 1, n ≥ j ≥ 1, j > i. Из построения видно, что δ (j, 0n-j) ∈ F, а δ (i, 0n-i) ∉ F. А состояния n и n – 1 различимы единицей: δ (n, 1) ∈ F, а δ (n – 1, 1) ∉ F.
Переброска k-дуг осуществляется следующим образом:
- дугу, идущую от первого состояния, перебрасываем в состояние k;
- начиная с состояния k последовательно перебрасываем дуги из одного состояния в предыдущее: из состояния i в состояние i – 1, при условии, что k ≥ i > 2;
- дугу из состояния 2 перебрасываем в состояние k + 1;
- дуги, которые не подверглись переброске, если таковые имеются, оставляем без изменений.
Для наглядности приведем результат переброски k-дуг в акцепторе (рисунок 2).
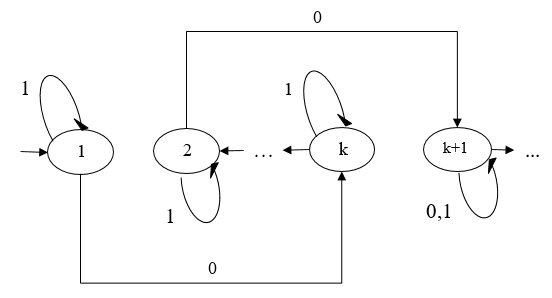
Рисунок 2 – Автомат-распознаватель после переброски
Из рисунка 2 видно, что в результате получили автомат, эквивалентный исходному.
На рисунке 3 проиллюстрирован пример переброски 3-х дуг с сохранением эквивалентности автомата.
Рисунок 3 – Пример переброски 3-х дуг в акцепторе
(анимация: 18 кадров, 3 цикла повторения, 134 килобайт)
(на вход подается слово 00100, красным цветом отмечен процесс распознавания слова автоматом, синим – процесс переброски дуг)
Выводы
В работе было рассмотрено поведение автомата-распознавателя при переброске одной дуги, а также при переброске k-дуг, где k > 2. Результаты переброски двух дуг на данный момент неизвестны и будут получены в результате выполнения магистерской работы.
На основании полученных данных были сделаны следующие выводы:
- переброска одной дуги эталона приводит к неэквивалентному автомату;
- ∃ автомат-распознаватель, допускающий переброску трех и более дуг с сохранением эквивалентности;
- приведен пример переброски трех дуг в акцепторе, в результате которой получен эквивалентный автомат.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: май 2018 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Паулин О.Н. Основы теории алгоритмов: учебное пособие / О.Н. Паулин. – Одесса: Автограф, 2005. – 188 с.
- Алимов А.А., Шабалина О.А. Искусственный интеллект в компьютерных играх. Многоуровневое планирование и реактивное поведение агентовагентов / А.А. Алимов, О.А. Шабалина // Известия ВолгГТУ. – 2011. – № 10. – С. 90-94.
- Капитонова Ю.В. Основы дискретной математики / Ю.В. Капитонова, С.Л. Кривий, А.А. Летичевский, Г.М. Луцкий, Н.К. Печурин. – К.: Наукова думка, 2002. – 568 с.
- Смирнова Н.В., Смирнов В.В. Применение теории конечных автоматов в разработке программных систем / Н.В. Смирнова, В.В., Смирнов // Збірник наукових праць Кіровоградського національного технічного університету. Техніка в сільськогосподарському виробництві, галузеве машинобудування, автоматизація. – 2014. – Вип. 27. – С. 316-320.
- Салмре И. Программирование мобильных устройств на платформе .Net Compact Framework / И. Салмре. – М.: Вильямс, 2006. – 702 с.
- Бурдонов И.Б., Косачев А.С., Кулямин В.В. Использование конечных автоматов для тестирования программ / И.Б. Бурдонов, А.С. Косачев, В.В Кулямин // Программирование. – 2000. – № 2. – С. 12-28.
- Фомичев В.М. Дискретная математика и криптология / В.М. Фомичев. – М.: ДИАЛОГ-МИФИ, 2003. – 400 с.
- Агибалов Г.П. Конечные автоматы в криптографии / Г.П. Агибалов // Прикладная дискретная математика. Приложение. – 2009. – № 2. – С. 43-73.
- Гилл А. Введение в теорию конечных автоматов / А. Гилл. – М.: Наука, 1966. – 272 с.
- Мур Э.Ф. Умозрительные эксперименты с последовательностными машинами / Э.Ф. Мур // Автоматы. – М.: Иностр. лит. – 1956. – С. 179-210.
- Брауэр Р. Введение в теорию конечных автоматов/ Р. Брауэр. – М.: Радио и связь, 1987. – 392 с.
- Starke P. Abstract automata / P. Stapke // American Elsevier, 1972. – 419 с.
- Hennie F.C. Fault detecting experiments for sequential circuits / F.C. Hennie // Proc. 5 Annual Symp. «Switch. Circuits Th. and Logic. Design». – 1964. – P. 95-110.
- Василевский М.П. О распознавании неисправностей автомата / М.П. Василевский // Кибернетика. – 1973. – № 4. – С. 93-108.
- Евтушенко Н.В., Лебедев А.В., Петренко А. Ф. О проверяющих экспериментах с недетерминированными автоматами / Н.В. Евтушенко, А.В. Лебедев, А.Ф. Петренко // Автоматика и вычислительная техника. – 1991. – № 6. – С. 81-85.
- Евтушенко Н.В., Петренко А.Ф. Метод построения проверяющих экспериментов для произвольного недетерминированного автомата / Н.В. Евтушенко, А.Ф. Петренко // Автоматика и вычислительная техника. – 1990. – № 5. – С. 73-76.
- Евтушенко Н.В., Петренко А.Ф. О проверяющих возможностях кратных экспериментов / Н.В. Евтушенко, А.Ф. Петренко // Автоматика и вычислительная техника. – 1989. – №3. – С. 9-14.
- Петренко А.Ф. Эксперименты над протокольными объектами / А.Ф. Петренко // Автоматика и вычислительная техника. – 1987. – № 1. – С. 16-21.
- Кудрявцев В.Б., Алешин С.В., Подколзин А.С. Введение в теорию автоматов/ В.Б. Кудрявцев, С.В. Алешин, А.С. Подколзин. – М.: Наука, 1985. – 320 с.
- Кудрявцев В.Б., Грунский И.С., Козловский В.А. Анализ поведения автоматов / В.Б. Кудрявцев, И.С. Грунский, В.А. Козловский // Дискретная математика. – 2009. – №1. – С. 3-35.
- Кудявцев В.Б., Грунский И.С., Козловский В.А. Анализ и синтез абстрактных автоматов / В.Б. Кудрявцев, И.С. Грунский, В.А. Козловский //Фундаментальная и прикладная математика. – Т. 15, № 4. – 2009. – С. 101-175.
- Грунский И.С., Козловский В.А., Пономаренко Г.Г. Представления конечных автоматов фрагментами поведения/ И.С. Грунский, В.А. Козловский, Г.Г. Пономаренко. – Киев: Наукова думка, 1990. – 232 с.
- Грунский И.С. Анализ поведения конечных автоматов/ И.С. Грунский. – Луганск: изд-во Луганск. гос. пед. ун-та, 2003. – 318 с.
- Грунский И.С., Козловский В.А. Синтез и идентификация автоматов/ И.С. Грунский, В.А. Козловский. – Киев: Наукова думка, 2004. – 246 с.
- Грунский И.С., Максименко И.И. Об экспериментах с автоматами при отсутствии верхней оценки числа состояний / И.С. Грунский, И.И. Максименко // Кибернетика и системный анализ. – 1999. – № 4. – С. 59-71.
- Козловский В.А. О структуре контрольных экспериментов с автоматом / В.А. Козловский // Кибернетика. – 1978. – № 3. – С. 19-33.
- Козловский В.А. О распознавании автомата относительно локально порожденного класса / В.А. Козловский // ДАН СССР. – 1981. – № 5. – С. 1047-1049.
- Козловский В.А., Копытова О.М. Представления автоматов относительно m-плотных классов / В.А. Козловский, О.М. Копытова // Матер. VIII Межд. семинара «Дискретная математика и ее приложения» (Москва, 2-6 февраля 2004 г.) – М.: Изд. МГУ. – С. 277-280.
- Буевич В.А., Каландарашвили Н.Г., Таль А.А. Об описании конечного автомата с помощью конечного множества вход-выходных слов / В.А. Буевич, Н.Г. Каландарашвили, А.А. Таль // Автоматика и телемеханика. 1970. – № 1. – С. 112-122.
- Буевич В.А., Каландарашвили Н.Г., Таль А.А. Конечные автоматы – эквивалентность и поведение/ В.А. Буевич, Н.Г. Каландарашвили, А.А. Таль. – М.: Наука, 1984. – 192 с.
- Копытова О.М. О структуре автоматов, сохраняющих поведение при перебросках дуг / О.М. Копытова // Труды VIII Международной конференции «Дискретные модели в теории управляющих систем». – М.: Макс-Пресс, 2009. – C. 155-159.
- Копытова О.М. О возможности сохранения поведения автомата при перебросках дуг / О.М. Копытова // Материалы VI Международной научно–практической конференции Новости научной мысли – 2010 (27.10-05.11.2010), Чехия. Прага. Издательский дом Образование и наука, 2010 – C. 41-46.
- Копытова О.М. Устойчивость автоматов к неисправностям их функции переходов / О.М. Копытова // Труды ИПММ АН Украины. – 2010. – № 21. – С. 57-66.
- Швец О.С., Копытова О.М. О сравнении поведения ОДk-эталона и автоматов, порождаемых его локальными преобразованиями / О.С. Швец, О.М. Копытова // Материалы V всеукраинской научно-технической конференции студентов, аспирантов и молодых ученых «Информационные управляющие системы и компьютерный мониторинг (ИУС КМ 2014)» (22.04-23.04.2014). Донецк: ДонНТУ, 2014. – С. 365-369.
- Бурлаева Е.И., Копытова О.М. Об одном типе локальных преобразований автомата / Е.И. Бурлаева, О.М. Копытова // Материалы IV всеукраинской научно-технической конфиренции студентов, аспирантов и молодых ученых «Информационные управляющие системы и компьютерный мониторинг (ИУС КМ 2013)» (24.04-25.04.2013). Донецк: ДонНТУ, 2013. – C. 479-484.