
РОБОТОТЕХНІКИ В ВИРОБНИЦТВІ
Сьогодні нам важко уявити своє життя без роботів і різних автоматичних пристроїв, які замінили людини в самих різних сферах промисловості і повсякденному житті. Незважаючи на відносно недовгу історію робототехніки, вона міцно увійшла в наше життя, замінивши людини в найбільш небезпечних умовах роботи.
В даній статті коротко наведена історія розвитку автоматизації та робототехніки.
Вихідною точкою розвитку промислової робототехніки став 1947 рік. З початком ядерної епохи в США групою вчених Аргонської національної лабораторії, на чолі якої стояв Р.Герцем, був створений перший в своєму роді автоматичний електромеханічний маніпулятор з копіюють управлінням. Даний механізм міг повторювати рухи людини і працювати з небезпечними радіоактивними матеріалами. Але у нього були істотних недоліки, наприклад, він не мав зворотного зв'язку по силі. Однак вже в1948 році компанія «General Electric» розробила копіює маніпулятор «Handy Man», в якому такий зворотний зв'язок була і оператор міг сприймати сили, що впливають на захоплення маніпулятора.
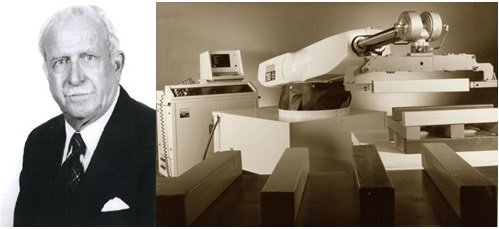
Перші промислові роботи з'явилися в середині 50-х років ХХ століття в США. Все почалося з Дж. Деволь (Рис.1) інженера, який розробив спосіб управління вантажним маніпулятором за допомогою перфокарт і подав патент заявку на сконструйований ним «програмований пристрій для перенесення предметів». Практично відразу вони спільно з Дж. Енгельберга створили компанію, яка вперше в світі почала випускати промислових роботів. Ця компанія отримала назву «Unimation».
У 1959 році фірма «Консолидейтед Корпорейшн» (США) опублікувала опис маніпулятора з числовим програмним управлінням (ЧПУ), а в 1960-1961 рр. в американській пресі з'явилися перші повідомлення про маніпуляторах «Transferrobot» і «Eleximan» з програмним управлінням для автоматизації складальних і інших робіт.
Експериментальний екземпляр робота «Unimation» був створений в 1959 р, а навесні 1961 року цей промисловий робот був введений в експлуатацію на ливарному ділянці одного із заводів автомобільної корпорації «General Motors», в місті Юінг - передмісті Трентона. Робот захоплював розпечені виливки дверних ручок та інших деталей автомобіля, опускав їх в басейн з охолоджувальною рідиною і встановлював на конвеєр, після чого вони надходили до робочих для обрізки і полірування. Працюючи 24 години на добу, робот заміняв три зміни робітників на важкому, брудному і небезпечному виробництві.
Даний робот мав 5 ступенів рухливості, мав гідропривід і двухпальцевое захватное пристрій з пневмопривідною. Переміщення об'єктів масою до 12 кг здійснювалося з точністю 1,25 мм. В якості системи управління використовувався программоносітель у вигляді кулачкового барабана з кроковим двигуном, розрахований на 200 команд управління, і кодові датчики положення. У режимі навчання оператор ставив послідовність точок, через які повинні пройти ланки маніпулятора протягом робочого циклу. Робот запам'ятовував координати точок і міг автоматично переміщатися від однієї точки в іншу в заданій послідовності, багато разів повторюючи робочий цикл. На операції розвантаження машини для лиття під тиском «Unimation» працював з продуктивністю 135 деталей за годину, частка шлюбу становила 2%, тоді як продуктивність ручного розвантаження становила 108 деталей за годину при дефектів до 20%.
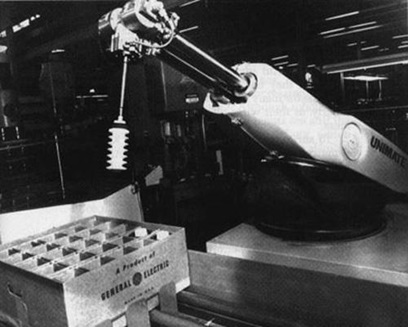
Промисловий робот «Версатран», який мав три ступені рухливості, як программоносителя використовував магнітну стрічку. Він використовувався обпалювальної печі і міг завантажувати та розвантажувати до 1200 розпечених цегли в годину. У той час співвідношення витрат на електроніку і механіку в вартості робота становило 75% і 25%, тому багато завдань управління вирішувалися за рахунок механіки. Зараз це співвідношення становить 25% і 75% відповідно. Масове використання промислових роботів в Європі почалося в 1967 році. Перший робот «Юнімейт» (Рис.2) був встановлений на металургійному заводі Швеції в місті Уппландс-Весбю. В цьому ж році в еру робототехніки вступила Японія, яка придбала робота «Версатран».
Незабаром в Японії та Швеції, а також у Великобританії, ФРН, Італії і Норвегії почався випуск промислових роботів власного виробництва. У 1968 році компанія «Кавасакі Хеві Індастріз» придбала ліцензію у фірми «Юнімейшн» для виробництва промислових роботів і вже в 1970 році Японія вийшла на перше місце в світі, як за річним випуску роботів, так і за кількістю промислових роботів, встановлених на підприємствах країни .
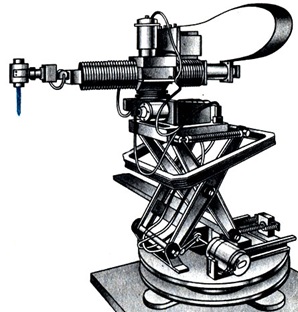
В Радянському Союзі промислові роботи з'явилися в 1971 році, завдяки Миколі Петровичу Белянин і Борису Миколайовичу Сурнін, які створили роботів УМ-1 і «Універсал-50». З 1972 по 1975 рр. в СРСР з'явилася цілий спектр промислових роботів, таких як серія «Універсалів» (Рис.3), ПР-5, «Бриг-10», ІЕЗ-690, МП-9С, ТУР-10 і ін.
З 60 років у США розроблялися роботи з системами управління, заснованими зворотного зв'язку. Спочатку визначають устрою в цих системах формувалися на комутаторної платі; в 1974 р фірма «Цинциннаті Мілакрон» вперше застосувала в системі управління роботом комп'ютер, створивши промисловий робот T3 (The Tomorrow Tool).
На сьогоднішній день машинобудування є найбільш роботизованою галуззю промисловості. Застосування роботів зумовило істотне підвищення продуктивності, отримання продукції високої якості за нижчою ціною. Роботу на відміну від людини не потрібно гарне освітлення, підтримання оптимальної температури на місцях роботи. Також зменшується виробнича площа, адже промислові роботи можна встановлювати як на стіні, так і на стелі. Підвищується безпека праці, маніпулятори можуть без проблем працювати з радіоактивними або хімічними небезпечними матеріалами, в приміщеннях з високою температурою або підвищеною запиленістю. Збільшується якість продукції, що випускається і зменшується кількість бракованих виробів. Роботу не потрібно вихідних або перерв, він спокійно може працювати 24 години на стуки 7 днів на тиждень. При правильній експлуатації витрати на придбання та обслуговування робота окупаються протягом одного року.
В конструкції робота може бути присутнім один або кілька маніпуляторів, при цьому сам маніпулятор може володіти різною вантажопідйомністю, точністю позиціонування, кількістю ступенів свободи. Варто відзначити, що існують прості механізми з 2-3 ступенями свободи, і складні - більше 6 ступенів свободи. Виробничі процеси в машинобудуванні дуже різноманітні. Їх можна розділити на заготівельні процеси (кування, лиття, штампування), процеси обробки заготовок (механічна обробка литих, кованих, штампованих деталей), збірку (монтаж, зварювання) і завершальну обробку (фарбування, упаковка).
Застосування роботів дозволяє істотно підвищити продуктивність штампувального виробництва. Це пов'язано з тим, що час штампування деталі становить 1-6 секунд, в той час як допоміжні операції (подача заготовки та її та видалення) займають набагато більше часу. Використання роботів значно скорочує час на допоміжні операції. У даній області застосовуються пристрої як з одним або двома робочими органами, причому двузхахватние роботи набагато більше ефективні.
В механообработке роботи виконує допоміжну роль. Їх призначення полягає в подачі та встановлення заготовки на верстат, а також видалення обробленої деталі з верстата. Ефективність застосування роботів в даній області очевидна - він повністю заміняє людини при роботі з металорізальними верстатами, тим самим знижуючи ймовірність травматизму. Велику роль в машинобудуванні грають складальні роботи (Мал.4). Вони застосовуються для складання різних агрегатів і вузлів з окремих елементів і деталей. Їх призначення - монтаж і фіксація деталей.

При складанні дуже велике значення має точність позиціонування окремих деталей. Сучасні роботи забезпечують точність до 0,05 мм, що у багато разів перевершує можливості людського ока. На типовому складальному механізмі встановлені кілька роботів, кожен з яких виконує свою операцію - подача, утримування, зчеплення деталей. Управління процесом здійснюється бортовим комп'ютером за заданим алгоритмом. Робот оснащений датчиками зворотного зв'язку, основним з яких є датчик зусилля. Сучасні механізми можуть виконувати різні види збірки.
В даний час ринок промислової робототехніки активно розвивається. Попит на автоматизацію постійно зростає навіть серед невеликих підприємств. Використання робототехніки має великий потенціал. Вона дозволяють мінімізувати час виробництва і збільшити продуктивність. Також відзначається зниження виробничих витрат. Впровадження роботів дозволяє скоротити штат робітників. Крім цього, роботу можна довірити виконання особливо відповідальних завдань, що дозволить уникнути помилок і виключити так званий «людський фактор».
Безумовно, автоматизація виробництва вигідна виробникам. Але процес масового впровадження передових технологій йде недостатньо швидко. Виникає питання: Що гальмує масове впровадження автоматизації? Дійсно, розвиток робототехнической промисловості вимагає великих інвестицій. Головні світові компанії на сьогоднішній день все-таки більше привертає дешева робоча сила, ніж інноваційні рішення автоматизації. Промислово розвинені країни, такі як Франція, Японія і Німеччина, розміщують своє виробництво в країнах з економікою, що розвивається, наприклад, в Індії або Бразилії. Проте, прогнози щодо подальшого розвитку галузі досить сприятливі. Разом з тим на ринку промислових роботів активно розвивається тенденція виробництва індивідуальних технологій і систем автоматизації.
У висновку так само потрібно відзначити, що великим ринком збуту робототехніки може бути не тільки промисловість. Було б несерйозно розглядати сучасну робототехніку як модний напрямок промислової автоматизації, яке після піку своєї популярності стане лише ще одним інструментом в руках інженера. Потенційно існує багато непромислових напрямів роботизації.
У військовій промисловості роботи виконують функції, як діючої сили, так і помічників для військовослужбовців. Наприклад, роботи для перенесення і навантаження важких вантажів. А уявіть, скільки життів можуть, і врятували, роботи сапери. Адже їм не страшні вибухи, і навіть якщо бомба зашкодить робота, то його можна відновити, чого не можна сказати про людське життя. Уже нетривалий час у військовій промисловості застосовуються дрони як розвідники і ефективної бойової сили (Мал.5). Вельми тривалий час ведеться розробка екзоскілетов військового типу, повністю автоматичних або напівавтоматичного техніки.

Такі роботи вже досить щільно увійшли в життя людей. Вони постійно розвиваються, на ринки виходять нові види автоматизованих автономних пристроїв, наприклад, роботи пилососи (Рис.6), які здійснюють прибирання будинку без втручання людини. Варто відзначити, що спочатку планувалося, що саме побутові роботи стануть найбільш поширеними, проте це не так. Хоча можна відзначити тенденції на збільшення попиту таких пристроїв.

Роботизація так само не обійшла і медицину. Тепер за допомогою новітніх технологій стала доступна можливість здійснювати операції які коли то вважалися не здійсненими. Широкому загалу стали доступні новітні розробки в сфері протезування кінцівок.
Підвівши підсумки можна сказати, що роботизації промисловості це важливий крок у розвитку людства. А також застосування роботів в інших сферах дає людині більше можливостей для розвитку і широкий спектр можливостей в робототехніки.
Список джерел
- Корызев Ю.Г. «Применение промышленный роботов» / Издательство «Москва» 2015 год.
- Тechno guide www.techno-guide.ru.
- Вікіпедія ru.wikiversity.org .