
Реферат по теме выпускной работы
Содержание
- Введение
- 1 Описание электромеханического инвалидного кресла
- 2 Описание типовых защит в электроприводе и недостатки существующего решения
- 2.1 Моделирование защит
- 2.2 Защита от одновременного включения ключей в стойке
- 3 Реализация защит
- Выводы
- Список источников
Введение
Среди изделий, предназначенных для людей с ограниченными физическими возможностями, в особый класс выделяют технические средства, компенсирующие нарушения опорно-двигательной системы человека, например, трости, костыли, протезы нижних конечностей, кресла-каталки и кресла-коляски. Кресло-коляска, в отличие от кресла-каталки, предназначено для управления инвалидом самостоятельно, а не сопровождающим лицом. Кресла-коляски могут иметь механический привод, при котором колёса приводятся в движение силой рук, а также электрический привод, в состав которого входят: аккумулятор, силовой преобразователь, микроконтроллер, устройство ввода и редуктор. Такие инвалидные кресла предназначены для передвижения не только в помещении, но и на улице, поэтому важно, чтобы в микроконтроллер была заложена удобная и надежная система защиты, которая в случае неисправности сможет решить проблему. Коляска с электроприводом Invacare Storm отличается стильным дизайном и удобным управлением, выполнена по наивысшим требованиям к конфигурируемости, регулировке и функциональности. Благодаря модульной конструкции Invacare Storm легко модернизируется в соответствии с требованиями пользователя и не требует сложного технического обслуживания. Кресло Storm разрабатывалось по принципу “Простота эксплуатации”, а современный дизайн Storm подчеркивает прочность его конструкции и хорошие ходовые качества. Целью дипломной работы является разработка системы защитных функций электрического инвалидного кресла Storm XS компании Invacare. Это одна из первых моделей серии. Это кресло-коляска комбинированного типа (подходит как для передвижения в закрытом помещении, так и для уличного использования) с индивидуальным приводом задних колёс. В качестве двигателей используются коллекторные моторы-редукторы GP8040SB-SRG1 постоянного тока мощностью 350 Вт с номинальным напряжением 24 В, номинальным током 14 А и номинальной скоростью 4000 об/мин. Передаточное число редуктора равно 25,1, а диаметр ведущих колёс составляет 36 см. В комплекте имеется две аккумуляторные батареи номинальным напряжением 12 В каждая и ёмкостью 40 А?ч. Это кресло-коляска удобно тем, что подлокотники и подножка регулируются по высоте, также имеется амортизация задних колёс. К двигателям прикреплены электромагнитные тормоза с номинальным усилием 2,2 Н?м. Вес кресла-коляски составляет около 70 кг без аккумуляторов и 103 кг с аккумуляторами. Номинальная грузоподъемность – 110 кг. Проблема помощи людям с ограниченными физическими способностями остаётся одной из самых сложных, требующих от общества не только её понимания, но и участия в этом процессе многих специализированных учреждений и структур. Реабилитацией инвалидов являются не только лечение и улучшение состояние здоровья, но и процесс достижения человеком максимальной самостоятельности в обществе. Одними из приспособлений, наибольшим образом способствующими этому, являются протезы конечностей и электромеханические инвалидные кресла.
1. Описание электромеханического инвалидного кресла
В наше время, к сожалению, существует много людей не способных самостоятельно передвигаться, поэтому инвалидная коляска с приводом является отличным средством передвижения – она позволяет вести полноценный образ жизни, абсолютно не используя силы посторонних. Инвалидная коляска с электрическим приводом - любая посадочная поверхность с прикрепленными к ней колесами, приводимая в движение электрическим источником энергии, обычно электродвигателями и аккумуляторными батареями. Первые инвалидные коляски с электроприводом появились в начале 1900-х годов, однако спрос на них не существовал до окончания Второй мировой войны. Первые коммерчески производимые электрические инвалидные коляски были просто тяжелыми ручными инвалидными колясками с откидной рамой, которые приводились в движение свинцово-кислотными батареями, электродвигателями, приводными ремнями и шкивами. Эти системы, известные как обычные электрические инвалидные коляски, были очень упрощенными. Им требовалось использовать джойстик для управления движением кресла-коляски, а программируемость не существовала. Система сидения, как правило, состояла из подвесного сиденья и обивки спинки, что значительно ограничивало осанку для человека. Появление силовой базы, которая находилась под сиденьем и содержала двигатель и аккумуляторы, позволила добиться значительных механических достижений в электрических инвалидных колясках. Основа питания разделила электрическую инвалидную коляску на две составляющие: основа, обеспечивающая подвижность, и система сидения, обеспечивающая опору для тела. В то же время, когда происходил переход от обычной инвалидной коляски с электроприводом к более серьезной инвалидной коляске с электроприводом, в электронных системах произошли значительные успехи. Некоторые из этих механических и электрических усовершенствований включали возможность добавления систем наклона, регулировку мощности и программируемые настройки производительности (например, скорость движения вперед, скорость поворота и ускорение). Джойстики, самые основные и распространенные устройства, используемые для управления электрическими инвалидными колясками. Достижения в системах управления позволили людям управлять инвалидной коляской, используя любое произвольное движение. Например, некоторыми электрическими инвалидными колясками можно управлять с помощью движения головы, активации дыхания, движения языка или управления нижней конечностью. На электрических инвалидных колясках используются два типа приводных механизмов: непрямой привод и прямой привод. Системы косвенного привода (шкивы и приводные ремни) используются на обычных электрических инвалидных колясках, тогда как системы прямого привода (обычно через редуктор) используются на инвалидных колясках с силовой опорой. Подавляющее большинство современных электрических инвалидных колясок используют силовую базу с системой прямого привода. Как правило, две батареи на 12 В соединенные последовательно (всего 24 В) необходимы для питания электрической инвалидной коляски. В электрических инвалидных колясках могут использоваться аккумуляторы с влажным электролитом, гелиевые аккумуляторы или аккумуляторы с абсорбирующим стеклом. Электрические аккумуляторы для инвалидных колясок, как правило, являются перезаряжаемыми. Электрические инвалидные коляски также можно классифицировать на расположения ведущих колес. Существует три типа электрических инвалидных колясок: передний, средний или центральный, и задний. Традиционно, электрические инвалидные коляски с задним приводом предпочитались из-за их сходства с ручными инвалидными колясками по конструкции и маневренности. Тем не менее, инвалидные коляски с центральным приводом приобрели популярность, поскольку они обеспечивают повышенную маневренность. Инвалидные коляски с механическим приводом (PAPAW) включают в себя функции как ручных, так и электрических инвалидных колясок. PAPAW обычно состоит из сверхлегкой ручной коляски с внешним источником питания (аккумуляторы и моторы). Это скорее дополняет, чем заменяет способность человека вручную двигать инвалидную коляску. Толкатель содержит датчики, которые определяют направление и величину силы, приложенной к нему человеком. Двигатели затем активируются и помогают в движении коляски.
2 Описание типовых защит в электроприводе и недостатки существующего решения
Аварийными режимами в электрических цепях двигателя могут быть:
- короткие замыкания;
- кратковременные и длительные токовые перегрузки двигателя;
- перебои в электроснабжении, недопустимое снижение напряжения сети;
- перенапряжения в силовой цепи;
- ошибки, связанные с программным обеспечением.
Защита от токов короткого замыкания и максимально-токовая защита выполняется с помощью максимальных токовых реле мгновенного действия, автоматических выключателей (автоматов), а также предохранителей. Предохранители обеспечивают невысокую точность уставки, которая к тому же изменяется с течением времени из-за коррозии. Кроме того, даже правильно выбранные предохранители не защищают АД от работы на двух фазах. В случаях, когда нужно обеспечить большую точность уставок срабатывания, применяются максимальные мгновенные реле тока, воздействующие на контакторы или высоковольтные выключатели. Они отключают двигатели при возникновении коротких замыканий, кратковременных перегрузках по току.
2.1 Моделирование защит
Основными задачами системы управления электроприводом являются: осуществление пуска, синтез контура регулирования тока, создание необходимого режима работы, и обеспечение реверса. Кроме того, система управления может содержать различные защиты и дополнительные функции. Чаще всего стараются выполнить основные задачи с наличием встроенных защит.
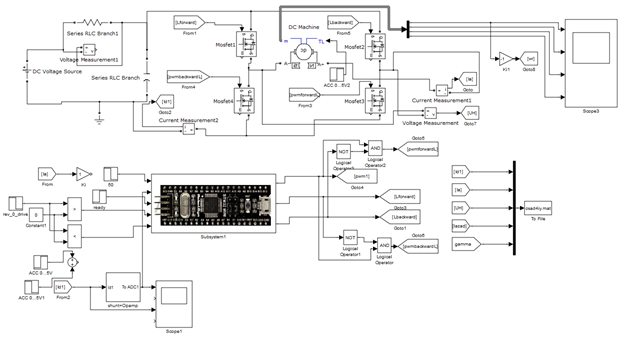
Рисунок 1 – Модель системы управления одним двигателем"
Данную модель можно разделить на две части: первая часть – силовая, в нее входят двигатель постоянного тока, силовые ключи Mosfet, источник питания, вторая часть – система управления двигателем, которая настраивает регулятор тока и генератор ШИМ, получает сигналы задания со смартфона, калибровку и измерение тока. На вход микроконтроллера подаются сигналы со смартфона по средствам Bluetooth. Для имитации сигналов составим подсистему, показанную на рисунке 2. В качестве источника питания выбран аккумулятор с напряжением 24 В. Верхние ключи отвечают за направление вращения, нижние – задают скорость. Подсистема Smartphone имитирует сигналы задания со смартфона, которые приходят на микроконтроллер с модуля Bluetooth. Подсистема shunt + Opamp AD823 имитируют шунт с операционным усилителем. Подсистема STM32F401CC имитирует микроконтроллер, в котором происходит калибровка сигнала с датчика тока, настройка ПИ – регулятора и т.д. Блоки IR2104 является драйверами для силовых ключей.
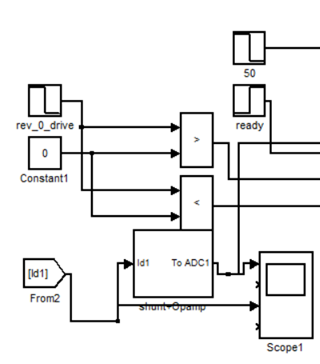
Рисунок 2 – Подсистема, имитирующая сигналы со смартфона
Подсистема shunt + Opamp имитирует шунт с операционным усилителем, предназначена для преобразования и масштабирования тока, протекающего в двигателе, в напряжение, необходимое для работы микроконтроллера. Подсистема показана на рисунке 3.
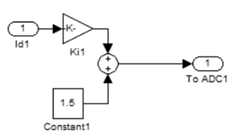
Рисунок 3 – Подсистема shunt + Opamp
Подсистема STM32F401CC получает сигналы со смартфона и путем логических операций обрабатывает входные сигналы и посылает команды в силовую часть на Mosfet транзисторы для управления двигателем. Данная подсистема преобразует и масштабирует ток, протекающий в двигателе, в напряжение, необходимое для работы микроконтроллера. При протекании тока 10 А на выходе получим 1 В. В системе добавлено смещение 1,5 В для наблюдения тока в генераторном режиме. Выход подсистемы поступает на АЦП микроконтроллера в подсистему STM32F401CC.
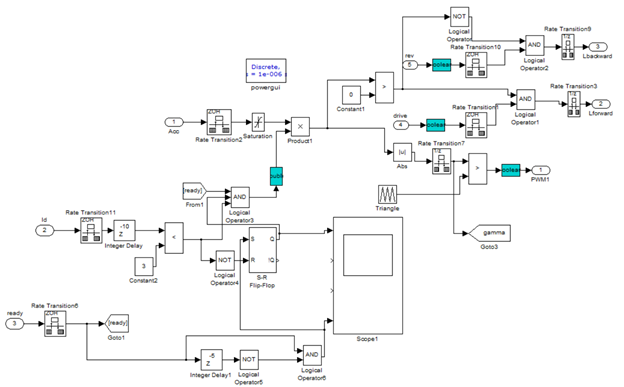
Рисунок 4 – Подсистема STM32F401CC
Когда приходит сигнал с датчика, микроконтроллеру нужно знать какое значение напряжения соответствует нулевому току, ибо выход датчика тока имеет различные шумы и помехи. Для того что бы определить значение нулевого тока, необходимо добавить фильтр, с постоянного времени T=0,01 с, и записать значение получившегося сигнала через 8Т что соответствует 80 мс. При подаче 1 на вход интегратора на выходе идет время, при достижении 80 мс происходит запись сигнала с фильтра через вход in current1. Данный фильтр конвертирует данные с целочисленного формата single в формат с плавающей запятой uint16. Это необходимо для работы фильтра, так как фильтр не может работать с целыми числами. Выход этого фильтра поступает на вход интегратора У0 и через 80 мс запишется отфильтрованное значение нулевого тока в микроконтроллер на выход Out1. С выхода калибратора приходит сигнал со знаком минус и вычитает из полученного значения откалиброванное. Далее производиться обратное преобразование из 4096 бит в 3,3 В для получения напряжения, а для получения значения тока, необходимо умножить эти показания на 10, чтобы 1 В соответствовал 10 А, с дальнейшим заводом этого значения на блок Product. Шунт расположен так, что при движении вперед или назад ток движется в одну сторону, поэтому берется дополнительный сигнал с блока Sign, где происходит изменение знака при движении назад. Сигнал ? на входе блока Sign является положительным при движении вперед и отрицательным при движении назад. Сигнал с блока Product, поступающий на регулятор тока образует, отрицательную обратную связь по току. Входы reset и ready поступают на блоки Rate Transition, переключающие шаг дискретности от очень маленького шага 1 мкс, который близок к непрерывной системе, к шагу дискретности нашего микроконтроллера 100 мкс. Такой шаг дискретности выбран исходя из частоты работы ШИМ равной 10 кГц. Далее сигнал ? поступает на отдельные области управления: верхняя часть с выходами Lbackward и Lforward отвечает за направление движения вперед и назад, а нижняя часть образует генератор ШИМ. В верхней части происходит сравнение сигнала ?: если ? больше нуля, то движемся вперед Lforward, а если ? меньше нуля - назад Lbackward. Сам генератор ШИМ генерируется в блоке. Triangle,а сигнал имеет форму пилы с частотой 10 кГц. Этот выход сравнивается с текущим значением ? и получается сигнал PWM1. Блок Abs необходимо использовать, потому что входной сигнал может быть, как положительным, так и отрицательным. Кроме того, на вход блока Product поступает и сигнал разрешения с входа ready. Значение генератора ШИМ с блока Triangle сравнивается с единицей (нижняя вершина пилообразного сигнала), при этом происходит аналог прерывания в виде импульса, с помощью которого происходит оцифровка измеряемого тока ровно на середине длительности импульса. Далее этот импульс поступает на входной интегратор после 12 битного АЦП, тем самым записывает значение интегратора с входа У0 при достижении переднего фронта этого импульса. Блок powergui необходим для работы всей системы с шагом дискретности 1 мкс.
2.2 Защита от одновременного включения ключей в стойке
В состав Н-моста входят силовые P и N канальные MOSFET, силовые диоды с барьером Шотки и цепи управления ключами. Транзисторы Q5 (Q12) и Q6 (Q11) представляют собой Р-канальные MOSFET с изолированным затвором c встроенным обратным диодом. Данные транзисторы работают в статическом режиме, и отвечают за направление вращения двигателя. Простыми словами, им не нужна высокая частота коммутации. Данные транзисторы управляются с помощью делителя напряжения и шунтирующего транзистора Q1 (Q4) и Q2 (Q3). Если на базу биполярного транзистора подать логическую «1» с микроконтроллера, откроется транзистор, тем самым подключит делитель, собранный на резисторах R2, R3, R5, R7 (R27, R26, R25, R24) и создаст на затворе Р-канального MOSFET напряжение равное половине напряжения питания - 12В. Биполярные транзисторы Q1 (Q4) и Q2 (Q3) можно использовать любые с напряжением питания от 50 В и максимальным током коллектора не более 100 мА. Конденсаторы С2 (C19) и С3 (C18) являются помехоподавляющими, они предотвращают ложное открытие силового транзистора при индуктивных выбросах в силовой цепи. Рекомендуется использовать дополнительный электролитический конденсатор С1 (C26) емкостью 500 мкФ на каждые 10 А тока протекающего в нагрузке. Транзисторы Q7 (Q10) и Q8 (Q9) представляют собой N-канальные MOSFET с изолированным затвором c встроенным обратным диодом. Эти транзисторы работают на частоте 10 кГц, поэтому к ним применяются более серьезные требования. Для работы транзисторов в области больших токов необходимо достаточное напряжение на затворе, для обеспечения нужной вольтамперной характеристики. Управляющее напряжение 12 В будет подаваться на затвор со специального драйвера. Этого напряжения достаточно для работы силовых ключей в зоне больших токов. В данной схеме имеются диоды D1 (D4), D6 (D7) и D8 (D5) с барьером Шоттки. Диоды D6 (D7) и D8 (D5) являются защитными для верхних и нижних транзисторов при работе моста на активно-индуктивную нагрузку. В типовых схемах наличие емкости в MOSFET транзисторах может привести к возникновению сквозных токов, особенно при больших скоростях переключения dV/dt силовых транзисторов. При высокой скорости переключения этот ток будет протекать через емкость, расположенную между стоком и затвором транзистора. Так же наличие данной емкости увеличивает риск пробоя затвора при коммутации. Это связано с тем, что данная емкость может зарядиться напряжением питания, а как известно, напряжение на затворе не должно превышать напряжения 20 В (для N-канальных - 17 В). При открытии транзистора верхнего плеча напряжение сток-исток противоположного транзистора уменьшается со скоростью dV/dt. Фронт этого напряжения создает ток, протекающий через емкость, затворный резистор и выходной каскад драйвера, что создает падение напряжения на активном сопротивлении в цепи затвора. Если образующийся потенциал превысит пороговое напряжение затвора VTH, произойдет ложное открывание транзистора с последующим коротким замыканием или пробоем затвора (рисунок 2.9). Данный эффект вызван так называемой емкостью Миллера. Кроме наличия паразитной емкости, MOSFET транзисторы не должны работать без защит при наличии обратного тока. Встроенные в транзистор диоды решают данную проблему, однако полагаться на них не стоит из-за недостаточной скорости открытия и нарастания сигнала. Если через MOSFET пройдет ток в обратном направлении, так же произойдет ложное открытие, а при больших значениях этого тока - пробой канала. Однако используя данные диоды, мы тем самым заблокировали путь протекания обратного тока, поэтому дополнительно был установлен диод D1 (D4). Все диоды подобраны с запасом по напряжению и току.
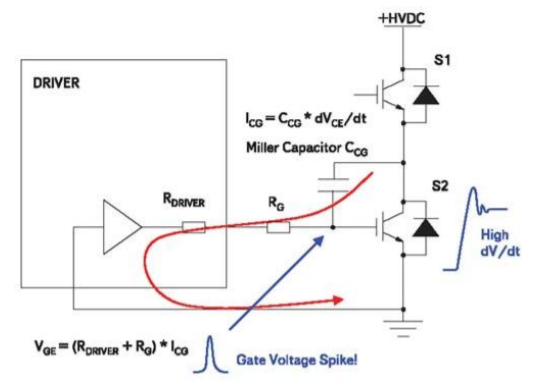
Рисунок 5 – Ложное включение транзистора из-за емкости Миллера
Любые транзисторы MOSFET не безопасно подключать напрямую к микроконтроллеру из-за внутренних емкостей канала. Даже если ограничить максимальный ток, протекающий на затворе, это не дает гарантий того, что при таком подключении микроконтроллер не выйдет из строя. Так же микроконтроллеры выдают от 3,3 до 5 В, что недостаточно для работы транзисторов в области больших токов. Низким напряжением можно управлять только не большой нагрузкой. В противном случае произойдет, перегрев транзистора из-за работы в не стабильном режиме. При таком подключении велика вероятность выхода из строя микроконтроллера, так как он будет работать на активно-емкостную нагрузку, это связанно с особенностью заряда затвора транзистора.
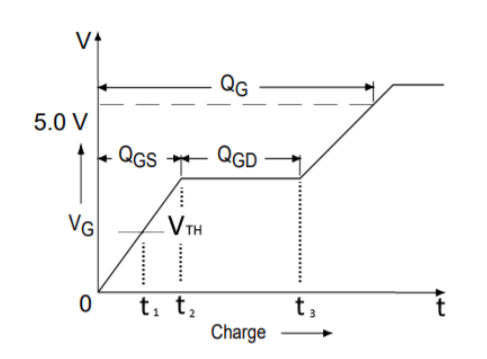
Рисунок 6 – Процесс заряда затвора MOSFET
Время от нуля до t1 называется Turn-on delay, в этот момент транзистор закрыт. Напряжения VTH называется Gate Threshold Voltage - минимальное напряжение открытия транзистора. В промежутке с t1 до t2, ток стока начинает линейно увеличиваться до максимума. За этот время транзистор успевает полностью открыться, при этом напряжение на стоке прекращает возрастать. Дальнейшее увеличение заряда на затворе QGD, в промежуток времени t2 - t3, уменьшает внутренне сопротивление перехода сток-исток до паспортного значения RDS(on). Данное значение имеется в документациях транзисторов. Этот феномен еще называют эффектом Миллера.
В двигателе инвалидного кресла установлен драйвер IR2104 с входными и выходными характеристиками такого вида:
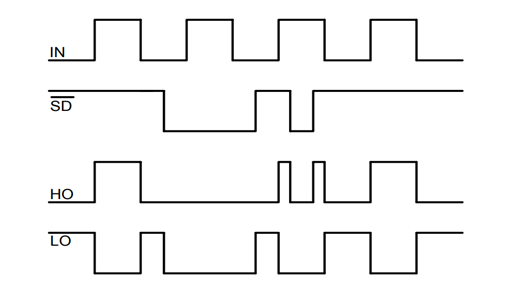
Рисунок 7 – Входные/выходные характеристики драйвера IR2104
Смотря на входные/выходные характеристики драйвера и характеристики на принципиальной схеме можно сказать что когда приходит импульс с DIRL1 на IN то на выходе Low Output мы разрешаем получать сигнал и напряжение на нем проходит. Шим PWM1 сравнивает значения с помощью входной характеристики Shutdown на двух двигателях и в зависимости от схожести сигналов разрешает либо запрещает и не дает пройти напряжению на двух участках, тем самым работая как защита от короткого замыкания на двигателях.
3 Реализация защит
Электромеханическое кресло-коляска Invacare Storm SX является одной из первых моделей данной серии. Это кресло-коляска комбинированного типа (подходит как для передвижения в закрытом помещении, так и для уличного использования) с индивидуальным приводом задних колёс. В качестве двигателей используются коллекторные мотор-редукторы GP8040SB-SRG1 постоянного тока мощностью 350 Вт с номинальным напряжением 24 В, номинальным током 18 А и скоростью холостого хода 4000 об/мин. Передаточное число редуктора равно 25,1, а диаметр ведущих колёс составляет 36 см. В комплекте имеется две аккумуляторные батареи номинальным напряжением 12 В и ёмкостью 40 А•ч каждая. К двигателям прикреплены электромагнитные тормоза с номинальным усилием 2,2 Н•м. Понимание отличий переменного и постоянного тока дает четкое представление о задачах, с которыми сталкиваются автоматические выключатели постоянного тока. Переменный ток промышленной частоты (50 Гц) меняет свое направление в электрической цепи 50 раз в секунду и столько же раз «переходит» через нулевое значение. Этот «переход» значения тока через ноль способствует скорейшему гашению электрической дуги. В цепях постоянного тока значение напряжения постоянно также как и направление тока постоянно во времени. Этот факт существенно затрудняет гашение дуги постоянного тока, и потому требует специальных конструкторских решений. Одно из таких решений — использование постоянного магнита. Движение дуги в магнитном поле является одним из способов гашения в аппаратах до 1 кВ и находит применение в модульных автоматических выключателях. На электрическую дугу, которая по своей сути является проводником, воздействует магнитное поле, и та затягивается в дугогасительную камеру, где окончательно затухает.
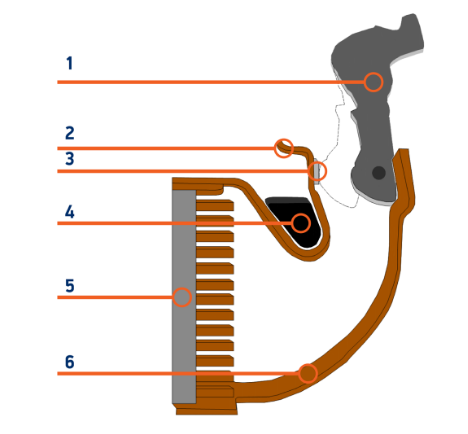
Рисунок 8 – Устройство модульного автоматического выключателя 1 – подвижной контакт, 2 – неподвижный контакт, 3 - серебросодержащая контактная напайка, 4 - магнит, 5 - дугогасительная камера, 6 – скоба.
Еще одним и, пожалуй, ключевым отличием между автоматическими выключателями переменного и постоянного тока, является у последних наличие полярности. При подключении же в сеть постоянного тока автоматических выключателей необходимо соблюдать правильную полярность. При подключении однополюсного выключателя постоянного тока питающее напряжение подается на клемму «1», а при подключении двухполюсного — на клеммы «1» и «4». Так как два двигателя по 18 А, то потребуется автоматический выключатель постоянного тока на 36 А, но надо брать автомат с небольшим запасом, поэтому смотрим приблизительно на 40 А. Подходящий вариант в интернете: Выключатель автоматический модульный OptiDin BM63-1C40-DC-УХЛЗ

Рисунок 9 – Выключатель автоматический модульный OptiDin BM63-1C40-DC-УХЛЗ
Для защиты электрической проводки и дорогостоящей радиоаппаратуры от короткого замыкания, бросков тока в питающей сети и обеспечения безопасной эксплуатации электроприборов широко используются плавкие вставки – предохранители. Они выпускаются разных конструкций, типоразмеров и на любые токи защиты. Рассмотренная технология ремонта предохранителей при соблюдении всех условий обеспечит его защитную функцию. Но не каждый имеет опыт работы с паяльником и измерения диаметра проволоки. Да и в любом случае предохранитель промышленного изготовления будет работать надежнее.
Предохранитель трубчатой конструкции представляет собой стеклянную или керамическую трубочку, закрытую с торцов металлическими колпачками, которые соединены между собой проволокой калиброванной по диаметру, проходящей внутри трубочки. Для задачи был выбран предохранитель в виде: ABB E9F 14 GG 50A 14X51ММ 2CSM256333R1801
Рисунок 10 – предохранитель ABB и его стоимость
Было принято решение защитить транзисторы на выходах MOSFET от перегорания. Для этого было принято решение использовать транзистор в ключевом режиме.
Выводы
В данном проекте была разработана и проанализирована аппаратная и программная защиты для инвалидного кресла Invacare Storm XS. Для выполнения поставленной задачи была разработана и реализована система защит на базе микроконтроллера STM32F401CC. Разработана принципиальная схема драйвера MOSFET. Для обеспечения защиты инвалидного кресла применяются предохранители транзисторы в ключевом режиме, настроена модель инвалидного кресла в MATLAB. Были получены и проанализированы осциллограммы токов при различных критических условиях и в нормальном состоянии. Полученные навыки при выполнении работы дают возможность реализовать свои навыки в дальнейшей работе с защитами и микроконтроллерами, в частности, с платами STM, и создавать более сложные проекты.
На момент написания данного реферата магистерская работа еще не завершена. Ориентировочная дата завершения магистерской работы: июнь 2023 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Gilbert Ndayisenga, Omar Gatera, Charles Kabiri, Janvier Niyitegeka, Delphine Bampire, Sophonie Harerimana, "IoT Based Household Water Consumption Management System", 2022 IEEE PES/IAS PowerAfrica, pp.1-4, 2022.
- Manoj Saini, Shagufta Khan, Vipul Dutt Mishra, Manav Mehra, Deeksha Singh, Gopal Sengar, "IoT Based Hybrid EV Charging System with Data Processing", 2022 International Conference on Intelligent Controller and Computing for Smart Power (ICICCSP), pp.1-5, 2022.
- A. V. Zinkevich, "ESP8266 Microcontroller Application in Wireless Synchronization Tasks," 2021 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), 2021, pp. 670-674.
- P. Macheso, T. D. Manda, S. Chisale, N. Dzupire, J. Mlatho and D. Mukanyiligira, "Design of ESP8266 Smart Home Using MQTT and Node-RED," 2021 International Conference on Artificial Intelligence and Smart Systems (ICAIS), 2021, pp. 502-505.
- Jevgenijs Telicko, Andris Jakovics, "Power efficient wireless monitoring system based on ESP8266", 2022 IEEE 63th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), pp.1-6, 2022.
- Falia Innocentia Ananda Sunarko, Epyk Sunarno, Diah Septi Yanarati, Eny Kusumawati, "Smart DC Home for Energy Saving with Android-Based Real-Time Energy Monitoring", 2022 International Electronics Symposium (IES), pp.156-161, 2022.
- S. S. Pakalapati, G. G. Chary, A. K. Yadaw, S. Kumar, H. K. Phulawariya and R. Kumar, "A prosthetic hand control interface using ESP8266 Wi-Fi module and Android application," 2017 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), 2017, pp. 1-3
- Ivan Vaccari, Maurizio Aiello, Federico Pastorino, Enrico Cambiaso, "Protecting the ESP8266 Module from Replay Attacks", 2020 International Conference on Communications, Computing, Cybersecurity, and Informatics (CCCI), pp.1-6, 2020.
- Ziyu Wan, Yunkai Song, Zhuli Cao, "Environment Dynamic Monitoring and Remote Control of Greenhouse with ESP8266 NodeMCU", 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), pp.377-382, 2019.
- Thongchai Pornchaiyasutthi, Tanapat Anusas-amornkul, "A Model for Victim-Rescuer Communications under Collapsed Structures using Node MCU ESP8266", Proceedings of the 2019 2nd International Conference on Electronics, Communications and Control Engineering - ICECC 2019, pp.34, 2019.
- P. S. B. Macheso, T. D. Manda, A. G. Meela, J. S. Mlatho, G. T. Taulo and B. M'mame, "Environmental Parameter Monitoring System Based on NodeMCU ESP8266, MQTT and Node-RED," 2022 International Conference on Computer Communication and Informatics (ICCCI), 2022, pp. 1-4.
- P. Srivastava, M. Bajaj and A. S. Rana, "IOT based controlling of hybrid energy system using ESP8266," 2018 IEEMA Engineer Infinite Conference (eTechNxT), 2018, pp. 1-5
- Farah Khaliq Baloch, Ghulam E Mustafa Abro, Waheed Ali Laghari, Zubair Adil Soomro, Asif.A. Rahimoon, Rahul Kumar, "Controlling and Monitoring of Hybrid Power System Using an Android Application", 2022 IEEE 5th International Symposium in Robotics and Manufacturing Automation (ROMA), pp.1-5, 2022.
- M. D. Bhujbal, M. G. Unde, "Real Time Monitoring and Security of Solar Power Plant Using IoT", 2022 IEEE India Council International Subsections Conference (INDISCON), pp.1-5, 2022.
- Ashim Mondal, Md Jishan Ali, Pallav Dutta, "IoT Enabled Smart Solar Panel Monitoring System Based on Boltuino Platform", 2022 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), pp.1-7, 2022.
- Ivan Vaccari, Maurizio Aiello, Federico Pastorino, Enrico Cambiaso, "Protecting the ESP8266 Module from Replay Attacks", 2020 International Conference on Communications, Computing, Cybersecurity, and Informatics (CCCI), pp.1-6, 2020.
- Fatih Ertam, Ilhan Firat Kilincer, Orhan Yaman, Abdulkadir Sengur, "A New IoT Application for Dynamic WiFi based Wireless Sensor Network", 2020 International Conference on Electrical Engineering (ICEE), pp.1-4, 2020.
- Jihen Souifi, Yassine Bouslimani, Mohsen Ghribi, Azeddine Kaddouri, Tobie Boutot, Hsan Hadj Abdallah, "Smart Home Architecture based on LoRa Wireless Connectivity and LoRaWAN® Networking Protocol", 2020 1st International Conference on Communications, Control Systems and Signal Processing (CCSSP), pp.95-99, 2020.
- Киричек, Р. В. Революция в мире Интернета вещей: возможности применения Wi-fi модуля ESP8266 в облаке / Р. В. Киричек, А. И. Хлызов // Актуальные проблемы инфотелекоммуникаций в науке и образовании : IV Международная научно-техническая и научно-методическая конференция: сборник научных статей в 2 томах, Санкт-Петербург, 03–04 марта 2015 года. – Санкт-Петербург: Санкт-Петербургский государственный университет телекоммуникаций им. проф. М.А. Бонч-Бруевича, 2015. – С. 325-330. – EDN UNVOTH.
- Кучерявый А.Е. Интернет Вещей. Электросвязь. 2013. № 1. С. 21-24. EDN: PVTCFH
- Росляков А.В., Ваняшин С.В., Гребешков А.Ю., Самсонов М.Ю. Интернет вещей. -Самара: ПГУТИ, ООО «Издательство Ас Гард», 2014. -340 с. - 978-3-8443-5087-6. ISBN: 978-3-8443-5087-6 EDN: UEPYVZ
- Яранцев, Р. О. Методы беспроводного обмена информацией между компонентами системы "умный дом" с применением микроконтроллеров ESP8266 / Р. О. Яранцев // Новые информационные технологии в научных исследованиях : материалы XХI Всероссийской научно-технической конференции студентов, молодых ученых и специалистов, Рязань, 16–18 ноября 2016 года / Рязанский государственный радиотехнический университет. – Рязань: Рязанский государственный радиотехнический университет, 2016. – С. 313. – EDN WZSDFB.
- Худяков, С. В. Использование микроконтроллера ESP8266 01. Программирование с помощью Arduino IDE / С. В. Худяков, С. Г. Самохвалова // Постулат. – 2016. – № 12(14). – С. 9. – EDN XSBKRZ.
- Соммер У. Программирование микроконтроллерных плат Arduino /Freeduino. СПб.: БХВ-Петербург, 2012. С. 13 - 29. EDN: QMWOMN
- Белов А.В. Конструирование устройств на микроконтроллерах. М.: ЭКОМ, 2010. С. 7 - 60.
- Абдрахманов, В. Х. Разработка средств автоматизации с использованием Wi-fi модулей ESP8266 и LPWAN технологий / В. Х. Абдрахманов, К. В. Важдаев, Р. Б. Салихов // Электротехнические и информационные комплексы и системы. – 2017. – Т. 13. – № 4. – С. 98-108. – EDN YSIQRX.
- Моисеев, Д. Н. Беспроводной контроль научного оборудования и мониторинг датчиков по Wi-Fi с помощью модуля ESP8266 / Д. Н. Моисеев // Автоматика и программная инженерия. – 2018. – № 1(23). – С. 9-19. – EDN UOPSWK.
- Поправкин, А. П. Разработка системы дистанционного управления роботом на базе Wi-Fi модуля ESP8266 ESP-12E / А. П. Поправкин, Н. В. Шевченко // Современные проблемы радиоэлектроники и телекоммуникаций. – 2018. – № 1. – С. 37. – EDN LSKFCK.
- Группа стандартов WiFi IEEE 802.11 [Электронный ресурс]. - Режим доступа: http://wi-life.ru/texnologii....
- NODEMCU_DEVKIT_V1.0.PDF [Электронный ресурс]. -Режим доступа:https://github.com/nodemcu/nodemcu-devkit....
- Маркевич, А. А. Сеть из микроконтроллеров ESP8266 для системы управления / А. А. Маркевич, Р. Н. Белокопытов // Modern Science. – 2020. – № 4-1. – С. 363-365. – EDN DUPFUU.
- Шварц М. Интернет вещей с ESP8266. [Текст] / М. Шварц. - Санкт-Петербург: БХВ-Петербург, 2018. -192 с.
- Беспроводные сети Wi-Fi. - М.: Интернет-университет информационных технологий, Бином. Лаборатория знаний, 2013. - 216 c.
- Росс, Д. Беспроводная компьютерная сеть Wi-Fi своими руками (+ CD-ROM) / Д. Росс. - М.: Наука и техника, 2015. - 384 c.
- Жиганов, А. И. Разработка автоматизированной беспроводной системы управления IOT устройствами с использованием микроконтроллера ESP8266 и модели информационного обмена "издатель - подписчик" / А. И. Жиганов, П. В. Кожевников, В. Н. Князев // Информационные технологии в науке и образовании. Проблемы и перспективы : сборник научных статей IV ежегодной межвузовской научно?практической конференции, Пенза, 15 марта 2017 года. – Пенза: Пензенский государственный университет, 2017. – С. 146-148. – EDN ZCZEEJ.
- Hersent, O. The Internet of Things: Key Applications and Protocols / Olivier Hersent, David Boswarthick, Omar Elloumi. - Chichester, UK: Wiley, 2012. - 370 c.
- Boyd, B. Building Real-time Mobile Solutions with MQTT and IBM MessageSight / Bryan Boyd, Joel Gauci, Michael P. Robertson et all. - USA: IBM Redbooks, 2014. - 264 с.