
Abstract
Content
- Introduction
- 1. Theme urgency
- 2. Features working with mekanum wheels
- 3. Modernization of the robot prototype and development of a control system
- Conclusion
- References
Introduction
The robotics and computer science industry as autonomous mobile robots have tightly occupied a niche intra-production logistics. In various fields of transportation of parts, equipment, for loading and unloading robots are increasingly used. Mobile robots are able to move in their environment, and are not tied to a single physical location. They can also function without participation a person, and move along the specified routes. Robots increase workflow productivity and optimize labor costs, which quickly recoups the costs of modernization of production.
They are actively used in space exploration, and are increasingly appearing for household use as a robot vacuum cleaner. Also for entertainment purposes, for example, the robot Cosmo, Anki, Vector.
Industrial robots have been used for a long time in the automotive, aircraft, and instrument manufacturing enterprises. They perform a variety of functions, operations, including welding, automatic control of finished products, assembly of products, sampling of various materials for analysis. The works are used by employees of special services to search for victims in emergency situations, search for unexploded shells, mine clearance, are also used for welding inside pipes laid under highways, for troubleshooting power lines.
Analyzing the trends in the development of robotics, one can imagine a future in which robots will become indispensable assistants for people and their daily lives.
With the help of existing developer systems, robots already have artificial intelligence, GPS navigation systems, video cameras, echo sounders, lidars, which allows robots to track their location and build terrain maps, and on the built terrain maps, the operator can set routes to perform tasks.
The aim of the work is to modernize the prototype of a mobile robot based on mekanum wheels, with the possibility of creating terrain maps using the ROS package, developing a robot control system using Matlab, and visualizing movement.
1. Theme urgency
Industrial robots have long been commonplace in the automotive, aircraft, and instrument manufacturing industries. They perform a variety of functions, operations, including welding, automatic control of finished products, assembly of products. Robots are used by special services employees to search for victims in an emergency, search for unexploded shells, mine clearance.
The development and launch of consumer robots for use in everyday life is actively underway. The most famous examples are a robot vacuum cleaner that automatically cleans the room.
Mobile robots are also beginning to be actively used in the warehouses of online stores. This is due to the large number of orders and in order to improve the logistics of consumer orders, robots are used that are able to quickly find the right product and transport it to further loading and delivery of the order to the consumer. They use mobile robots that automatically scan the barcode and find the necessary goods and deliver it to the point of dispatch and control of the goods.
2. Features working with mekanum wheels
Due to the special design of the mekanum wheel shown in Figure 1, the mobile robot can move in different directions, this is achieved by changing the speed and direction of rotation of the wheels.
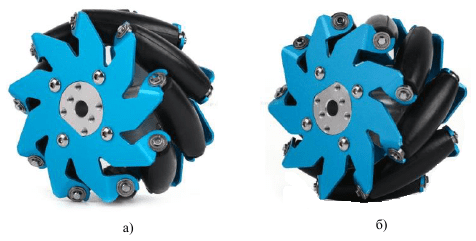
Figure 1 – Typical design of a mecanum wheel: a) left wheel, b) right wheel
Thanks to the use of such a wheel design, there is no need to integrate complex steering mechanisms and drives into mobile work and provide the steering function of the robot by using the ability of the mekanum wheels to move in an arbitrary direction.
For example, to move forward, the wheels must move strictly in one direction. To turn 180 degrees, the wheels must rotate to the right in different directions. And when the front and rear wheels rotate in opposite directions, the robot will move to the side.
Figure 2 – Different ways of movement
(animation: 25 frames, infinite cycles, 125 kilobytes)
Thus, a vehicle that is provided with a drive using mecanum wheels has 3 degrees of freedom, which consist of wheel rotation, roller rotation and rotational sliding around a vertical axis.
3. Modernization of the robot prototype and development of a control system
To modernize the developed prototype, it is necessary to develop an obstacle avoidance algorithm so that it meets the requirements: the prototype of the platform must build a terrain map itself and store it in memory for further use; calculate its position in space – to calculate the coordinates of the position of the platform itself and the destination; perform and search for the shortest path to move in space; avoid as static, and dynamic obstacles.
Methods and implementations of control of wheeled mobile robots:
Method 1. The movement of the platform along the line. A line is drawn on the floor along which the platform moves. Optical sensors are used that monitor the line, and commands are given to move. When turning, the platform can move sideways, either diagonally, or turn around on the spot at an angle of 90° and keep following the line. This solution can be applied at any enterprise, for example, for the delivery of parts to the workplaces of workers who work on the conveyor. The advantage of this method is that when following the line, the platform can move along a given trajectory (the trajectory is visible to the naked eye for other users and there will be no embarrassing situations if the walking person does not notice the platform), as well as the movement of the platform does not depend on the presence of a light source. Among the disadvantages, it can be noted that if any section of the applied line is damaged, the platform will lose its trajectory and may stop, there is no possibility of detouring obstacles.
Method 2. Hardware and software module of an autonomous mobile robot for orientation in a room-type room [9]. For orientation, distance and odometry sensors are used with the ability to recognize rooms by their characteristic metric features embedded in the internal model of the robot's world. This implementation involves the creation of virtual rooms (unfurnished) with their dimensions both real and taking into account the error of measurement sensors.
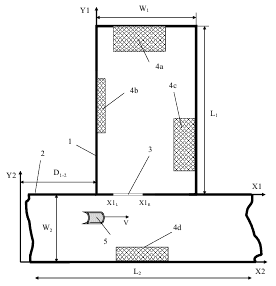
Figure 3 – The principle of forming an object-oriented map of the room. Main elements: 1 – room, 2 – corridor, 3 – passage, 4 – furniture, 5 – trolley autonomous mobile robot
For orientation, the platform calculates its position based on the size of the room and determines which room it is in. After determining the coordinates of the position in the room and determining the room number, the platform will start moving to the doorway. When the readings from the side sensors fulfill the condition (the width of the room that the robot follows will change in a big way), the platform will check the coordinates with the map and determine that this is a doorway to another room. The platform will turn around and start moving to another room, when the platform crosses the doorway, the value of the Y coordinate is applied to zero, and the platform will continue moving for a certain distance and stop, then the process of determining the coordinates of the platform and comparing the measurement results with the specified ones will begin. Dignities: there is no need to apply a trajectory line. Disadvantages: the complexity of building a room map.
Method 3. Localization of the robot using lidar. The article describes a method of localization of a mobile robot in a non-deterministic 2D space, based on the use of the method of simultaneous localization and map construction (SLAM) [10].
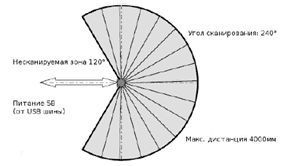
Figure 4 – Parameters of the Hokuyo URG-04LX-UG01 lidar
A one-dimensional array consisting of the values of distances and corresponding angles is obtained from lidar (i.e. data is transmitted in a polar coordinate system). With the help of a mathematical block, the data obtained is transferred from the polar system to the Cartesian coordinate system. If there is an obstacle in the path of the robot, the robot checks if there is an obstacle on the other side, for example, if the robot is moving straight and an obstacle appears in its path, it checks if there is an obstacle on the right or left, if not, it will go around the obstacle on the left or right. But if there is a wall on the left, then the robot will choose a path to bypass the obstacle on the right. Dignities: there is no need to create a terrain map and place it in a microcontroller, coordinates in space are determined accurately enough, there is no need to use odometry, successfully overcomes static obstacles. Disadvantages: Not suitable for environments with dynamic obstacles.
Method 4. Computer vision [11]. This method is suitable, for example, in a warehouse or distribution center, in which many such roboplatforms work instead of people. Thanks to computer (technical) vision and the use of a neural network, it is possible to train a robot to recognize its own kind to prevent collisions, as well as to identify the right objects to move them, for example, onto a conveyor belt. Advantages: the ability to bypass obstacles, accurate positioning. Disadvantages: complexity of implementation, high cost.
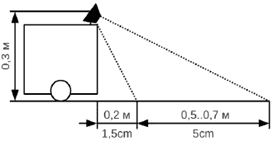
Figure 5 – Camera placement diagram
Method 5. Controlling the movement of a wheeled mobile robot along a curved trajectory in the presence of obstacles [12]. The article proposes to apply "dynamic planning", which allows you to divide into three narrowly focused tasks: 1) robot movement in the absence of obstacles; 2) robot movement in the presence of static obstacles; 3) robot movement in the presence of dynamic obstacles. Dignities: ability to bypass dynamic obstacles. Disadvantages: determining the coordinates of obstacles.
Conclusion
Having studied the material, it can be noted that mobile robots can be used in various branches of human activity. In order for the robot to move and perform its tasks, it is necessary to understand what mechanisms can help it in this. To do this, robots are equipped with various sensors, equipment, the necessary knowledge and skills are entered in the form of programs, and the robot must also be highly reliable and safe for humans.
Thanks to the design of the mekanum wheels, the robot has the ability to move in all directions without using complex steering mechanisms. This gives an advantage in moving in a confined space, compared to wheeled counterparts.
For the modernization of the listed methods, the most suitable for our task is localization using lidar. This will allow you to avoid obstacles in real time, as well as to build a map of the room and save it for further use for setting the endpoint by the operator.
This master's work is not completed yet. Final completion: June 2023. The full text of the work and materials on the topic can be obtained from the author or his head after this date.
References
- Мобильные промышленные роботы / Автоматизация внутренних перевозок/ MiR [Электронный ресурс]. – Режим доступа: https://www.mobile-industrial-robots.com/....
- Мобильные промышленные роботы / Автоматизация внутренних перевозок/ MiR600 [Электронный ресурс]. – Режим доступа: https://www.mobile-industrial-robots.com/mir600/....
- Автономные мобильные роботы/ OMRON [Электронный ресурс]. – Режим доступа: https://industrial.omron.ru/....
- Мобильные промышленные роботы / OMRON LD-60/90 [Электронный ресурс]. – Режим доступа: https://industrial.omron.ru/ld-60-90....
- Логистические роботы Ronavi [Электронный ресурс]. – Режим доступа: https://ronavi-robotics.ru/....
- Логистические роботы Ronavi Н1500 [Электронный ресурс]. – Режим доступа: https://ronavi-robotics.ru/h1500....
- Промышленные роботы KUKA [Электронный ресурс]. – Режим доступа: https://www.kuka.com/en-de....
- Промышленные роботы KUKA KMR QUANTEC [Электронный ресурс]. – Режим доступа: https://www.kuka.com/kmr-quantec....
- Рогаткин д.а., лапитан д.г. Ориентация автономного мобильного робота в помещении при помощи объектно-ориентированной карты местности с элементами модели мира // ползуновский вестник. 2015. №4-2. . – Режим доступа: URL:https://cyberleninka.ru/article/....
- Лаврентьев Е.Б., Кирпа В.Э. Локализация робота с помощью лидара // Молодой исследователь Дона. 2020. №1 (22). – Режим доступа: URL: https://cyberleninka.ru/article/....
- Миронов С. В., Юдин А. В. Система технического зрения в задачах навигации мобильных объектов // Программные продукты и системы. 2011. №1. – Режим доступа: URL: https://cyberleninka.ru/article/....
- Изюмов, А. А. Управление движением колесного мобильного робота с матипулятором по криволинейной траектории в условиях наличия препятствий / А. А. Изюмов, Н. Ю. Хабибулина, Ю. А. Шурыгин // Электронные средства и системы управления. Материалы докладов Международной научно-практической конференции. – 2020. – № 1-2. – С. 197-200. – EDN HQSHAQ.