
Реферат по теме выпускной работы
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: июнь 2023 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Содержание
- Введение
- 1. Актуальность темы
- 2. Особенности робота с меканум - колесами
- 3. Мобильные роботы производителей
- 3.1 Mobile Industrial Robots
- 3.2 Мобильный робот OMRON
- 3.3 Мобильный робот Ronavi Robotics
- 3.4 Мобильный робот KUKA
- 4. Модернизация прототипа робота и разработка системы управления
- Выводы
- Список источников
Введение
Отрасль робототехники и информатики в качестве автономных мобильных роботов плотно заняли нишу внутрипроизводственной логистики. В разных сферах транспортировки деталей, оборудования, для погрузки – выгрузки все чаще применяются роботы. Мобильные роботы способны перемещаться в своей среде, и не привязаны к одному физическому местоположению. Так же могут функционировать без участия человека, и двигаться по заданным маршрутам. Роботы увеличивают производительность рабочего процесса и оптимизируют трудозатраты, что быстро окупает затраты на модернизацию производства.
Активно применяются в изучении космоса, все чаще появляются для бытового использования, как робот-пылесос. Так же в развлекательных целях, например робот Cozmo, Anki, Vector.
Промышленные роботы давно используются на предприятиях автомобилестроения, авиастроения, приборостроения. Они выполняют разнообразные функции, операции, среди которых сварка, автоматический контроль готовой продукции, сборка изделий, забор различных материалов для анализа. Роботы используются работниками специальных служб для поиска пострадавших при чрезвычайных ситуациях, поиска неразорвавшихся снарядов, разминирования, также применяются для сварки внутри труб проложенных под автомобильными дорогами, для поиска неисправностей ЛЭП.
Анализируя тенденции развития робототехники, можно представить будущее, в котором роботы станут незаменимыми помощниками для людей и их повседневной жизни.
С помощью имеющихся систем разработчиков, роботы уже имеют искусственный интеллект, системы GPS-навигации, видеокамеры, эхолокаторы, лидары, что позволяет роботам отслеживать свое местоположение и строить карты местности, а на построенных картах местности оператор может задавать маршруты для выполнения задач.
Целью работы является модернизация прототипа мобильного робота на базе меканум – колес, с возможностью создания карт местности с помощью пакета ROS, разработки системы управления роботом с использованием Matlab, и визуализацией перемещения.
1. Актуальность темы
Промышленные роботы давно стали обычным явлением на предприятиях автомобилестроения, авиастроения, приборостроения. Они выполняют разнообразные функции, операции, среди которых сварка, автоматический контроль готовой продукции, сборка изделий. Роботы используются работниками спец служб для поиска пострадавших при чрезвычайной ситуации, поиска неразорвавшихся снарядов, разминировании.
Активно ведется разработка и выпуск на рынок роботов широкого потребления для использования в быту. Наиболее известные примеры – робот-пылесос, автоматически производящий уборку помещения.
На складах маркетплейсов также начинают активно применять мобильных роботов. Это обусловлено в связи с большим количеством заказов и чтобы улучшить логистику заказов потребителей, применяют роботов которые способны быстро находить нужный товар и транспортировать его к дальнейшей погрузке и доставки заказа потребителю. Применяют мобильных роботов, которые автоматически сканируют штриховой код и находят необходимый товар и доставляют его к пункту отправки и контроля товара.
2. Особенности робота с меканум - колесами
Из-за особой конструкции меканум – колеса, представленной на рисунке 1, мобильный робот может перемещаться в различные стороны, это достигается за счет изменения скорости и направления вращения колес.
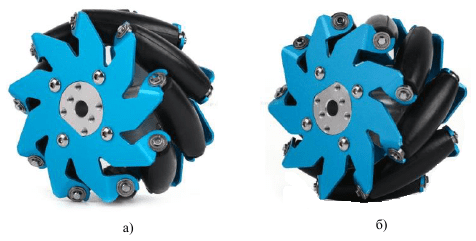
Рисунок 1 – Типовая конструкция меканум - колеса: а) левое колесо, б) правое колесо
Благодаря использованию такой конструкции колес нет необходимости встраивать в мобильные роботы сложных рулевых механизмов и приводов и обеспечивать рулевую функцию робота за счет использования способности меканум – колес двигаться в произвольном направлении.
К примеру, чтобы двигаться вперед, колеса должны двигаться строго в одном направлении. Для разворота на 180 градусов колеса должны вращаться вправо в разных направлениях. А когда передние и задние колеса вращаются в противоположных направлениях, робот переместится в сторону.
Рисунок 2 – Различные способы движения
(анимация: 25 кадров, циклов бесконечно, 125 килобайт)
Таким образом, транспортное средство которое обеспечено приводом с использованием меканум – колес, имеет 3 степени свободы, которые состоят из вращения колеса, вращения ролика и вращательного скольжения вокруг вертикальной оси.
3. Мобильные роботы производителей
3.1 Mobile Industrial Robots
Компания расположенная в Дании выпускает мобильных роботов различной грузоподъемностью и обеспечивает безопасное взаимодействие с людьми, избегает статические и динамические препятствия, соответствует стандартам безопасности. Каждый робот может комплектоваться дополнительными модулями и роботизированным манипулятором. Способен работать круглосуточно с периодической подзарядкой аккумуляторной батареи [1].
Адаптируется к сложной геометрии помещений. Дверные проемы, узкие проходы и лифты не мешают его передвижению. Постановка задач и управление осуществляются загрузкой CAD-файлов или вводом прямого программного кода через веб-интерфейс.
Различные модели отличаются способностью строить эффективный безопасный маршрут между точками отправления и доставки. Оснащаются 3D-камерами, работают по технологии лазерного сканирования, различает объекты, недоступные к дифференциации другими роботами.

Рисунок 3 – Мобильный робот MiR600 [2]
3.2 Мобильный робот OMRON
Японская компания OMRON выпускает мобильные роботы различной грузоподъемностью. В большинстве моделей способны, рассчитав оптимальный путь, перемещаться в сложных условиях загруженных оборудованием цехов, включая тесные проходы, в местах с оживленным движением персонала. [3].
Для такого полностью автономного транспорта не нужна предварительная подготовка маршрутов, такая как установка магнитов и маяков для ориентации в пространстве. Мобильные роботы OMRON предназначены для работы в автомобильной и пищевой промышленности, микроэлектронике и логистике, медицине и сфере потребительских товаров.

Рисунок 4 – Мобильный робот OMRON LD-60/90 [4]
3.3 Мобильный робот Ronavi Robotic
Компания Ronavi Robotics — единственный российский разработчик и производитель серийных логистических роботов, предназначенных для автономной работы на складах. Ronavi была создана, когда мирового рынка логистических роботов ещё не существовало, а сегодня занимает на этом рынке одну из десяти лидирующих позиций [5].
Роботизация складов снижает затраты в масштабной онлайн-торговле: нет необходимости платить за освещение, тепло, кондиционирование. В то же время люди, ранее работавшие на складах, с распространением логистических роботов могут заняться творческим трудом, а доступный объём хранения на складах увеличивается в три — пять раз.
Сегодня российский робот-логистик способен перевозить груз весом до 1500 кг, передвигаясь по складу со скоростью до 5 км в час и используя для движения QR-метки. Машины Ronavi Robotics могут самостоятельно заряжаться, и любое их количество можно объединить в «группу».
Компания предлагает роботизировать склады по модели «робот как сервис». Подписная модель позволяет владельцам складов роботизировать склад без капитальных затрат: в рамках подписки осуществляется интеграция группы роботов в ERP клиентов и круглосуточный сервис AMR. Такая бизнес-модель доступна для Ronavi H1500 (рисунок 5) грузоподъёмностью до 1500 кг. Эти роботы совместимы с паллетным и стеллажным хранением [6].
Рисунок 5 – Логистический робот Ronavi H1500
3.4 Мобильный робот KUKA
Немецкий производитель промышленных роботов и систем автоматизации производства. Надежное передвижение обеспечивается за счет встроенного программного обеспечения и системы управления. Перемещение с точностью до миллиметра осуществляется с помощью встроенных лазерных сканеров, что позволяет мобильному роботу KUKA самостоятельно контролировать свое окружение и безопасно объезжает людей или препятствия [7].
Мощные аккумуляторные батареи обеспечивают автономное питание на платформе. Благодаря беспроводной технологии для промышленного применения система свободно перемещается в своей рабочей зоне.
Мобильная платформа KUKA omniMove имеет стандартную грузоподъемность 7000 кг. Это позволяет использовать для манипулирования особенно крупных и тяжелых деталей. Несмотря на большую грузоподъемность он достигает точности позиционирования +/- 5 мм – независимо от уже пройденного расстояния. Благодаря многонаправленной технологии колеса KUKA он уверенно передвигается к намеченной цели даже в условиях ограниченного пространства.
KMR QUANTEC (рисунок 6) может перемещаться во всех направлениях благодаря специальной технологии привода KUKA omniMove: каждое колесо состоит из отдельных роликов бочкообразной формы. Они заключены в два неподвижных обода, которые не касаются земли. Каждое колесо может двигаться независимо от других. Это означает, что KMR QUANTEC может также перемещаться вбок, по диагонали и даже по кругу. В результате им можно безопасно и точно управлять даже в самых стесненных условиях [8].

Рисунок 6 – Промышленный робот KUKA KMR QUANTEC
4. Модернизация прототипа робота и разработка системы управления
Для модернизации разработанного прототипа необходимо разработать алгоритм избегания препятствий чтобы он отвечал требованиям: прототип платформы должен строить сам карту местности и сохранять в памяти для дальнейшего ее применения; производить вычисление своего положения в пространстве – для вычисления координат положения самой платформы и пункта назначения; выполнять и искать кратчайший путь для перемещения в пространстве; избегать как статические, так и динамические препятствия.
Способы и реализации управления колесными мобильными роботами:
Способ 1. Движение платформы по линии. На полу наносится линия, по которой платформа движется. Используются оптические датчики, которые следят за линией, и подаются команды на движение. При поворотах платформа может двигаться боком, либо по диагонали, либо разворачиваться на месте на угол 90° и продолжать следовать по линии. Данное решение можно применить на любом предприятии, например для подвоза деталей к рабочим местам работников, которые работают на конвейере. Достоинством этого способа является то, что при следовании по линии платформа может перемещаться по заданной траектории (траектория является видимой вооруженным глазом для остальных пользователей и не будет возникать конфузных ситуациях, если идущий человек не заметит платформу), так же движение платформы не зависит от наличия источника света. Из недостатков можно отметить то, что если повредится какой либо участок нанесенной линии, то платформа потеряет траекторию и может остановиться, нет возможности объезда препятствий.
Способ 2. Аппаратно-программный модуль автономного мобильного робота для ориентации в помещении комнатного типа [9]. Для ориентации применяются датчики расстояния и одометрии с возможностью распознавания помещений по их характерным метрическим признакам, заложенных во внутреннюю модель мира робота. Данная реализация предполагает создание виртуальных помещений (без мебели) с их размерами как реальными, так и с учетом погрешности датчиков измерений.
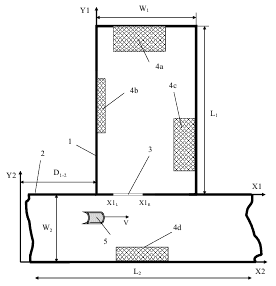
Рисунок 7 – Принцип формирования объектно-ориентированной карты помещения. Основные элементы: 1 – комната, 2 – коридор, 3 – проход, 4 – мебель, 5 – тележка автономного мобильного робота
Для ориентации платформа рассчитывает свое положение исходя из размеров комнаты и определяет в какой комнате находится. После определения координат положения в помещении и определение номера комнаты платформа начнет движение до дверного прохода. Когда показания с боковых датчиков выполнят условие (ширина комнаты, по которой следует робот изменится в большую сторону) платформа сверит координаты с картой и определит что это дверной проход в другую комнату. Платформа развернется и начнет двигаться в другую комнату, когда платформа пересечет дверной проем значение координаты Y применяется нулю, а платформа продолжит движение на определенное расстояние и остановится, далее начнется процесс определения координат платформы и сравнение результатов измерения с заданными. Достоинства: нет необходимости наносить линию траектории. Недостатки: сложность построения карты помещения.
Способ 3. Локализация робота с помощью лидара. В статье описывается способ локализации мобильного робота в недетерминированном 2D-пространстве, основываясь на использовании метода одновременной локализации и построения карты (SLAM) [10].
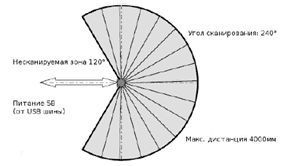
Рисунок 8 – Параметры лидара Hokuyo URG-04LX-UG01
С лидара получают одномерный массив, состоящий из значений расстояний и соответствующих углов (т.е. данные передаются в полярной системе координат). С помощью математического блока полученные данные переводятся из полярной системы в декартовую систему координат. Если на пути следования робота возникает препятствие, робот проверяет, есть ли препятствие с другой стороны, например, если робот двигается прямо и у него на пути появилось препятствие, он проверяет, есть ли препятствие справа или слева, если нет, то он объедет препятствие слева или справа. Но если слева находится стена, то робот выберет путь для объезда препятствия справа. Достоинства: нет необходимости создавать карту местности и помещать ее в микроконтроллер, достаточно точно определяются координаты в пространстве, нет необходимости использовать одометрию, успешно преодолевает статические препятствия. Недостатки: не подходит для среды с динамическими препятствиями.
Способ 4. Компьютерное зрение [11]. Данный способ подойдет например, в складском или распределительном центре, в котором вместо людей работают множество таких робо-платформ. Благодаря компьютерному (техническому) зрению и использовании нейросети возможно обучить робота распознавать себе подобных для предотвращения столкновений, а также для опознавания нужных предметов для перемещения их например, на ленту конвейера. Достоинства: способность объезда препятствий, точное позиционирование. Недостатки: сложность реализации, дороговизна.
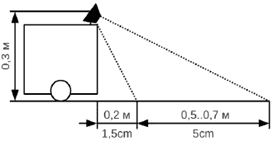
Рисунок 9 – Схема размещения камеры
Способ 5. Управление движением колесного мобильного робота по криволинейной траектории в условиях наличия препятствий [12]. В статье предлагается применить «динамическое планирование», что позволяет разделить на три узконаправленные задачи: 1) движение робота при отсутствии препятствий; 2) движение робота при наличии статических препятствий; 3) движение робота при динамических препятствиях. Достоинства: способность объезда динамических препятствий. Недостатки: определение координат препятствий.
Выводы
Изучив материал можно отметить, что мобильные роботы могут применяться в различных отраслях человеческой деятельности. Для того чтобы робот мог двигаться и выполнять поставленные задачи, необходимо понимать какие механизмы могут ему в этом помочь. Для этого роботы снабжаются различными датчиками, оборудованием, в виде программ заносятся необходимые знания и умения, также робот должен отличаться высокой надежностью и безопасностью для человека.
Благодаря конструкции меканум-колес робот имеет возможность передвигаться во всех направлениях, при этом не используя сложных рулевых механизмов. Это дает преимущество в передвижении в ограниченном пространстве, по сравнению с колесными аналогами.
Для модернизации из перечисленных способов наиболее подходящий для нашей задачи является локализация с помощью лидара. Это позволит избегать препятствия в реальном времени, а также строить карту помещения и сохранять ее для дальнейшего применения для задания оператором конечной точки.
Список источников
- Мобильные промышленные роботы / Автоматизация внутренних перевозок/ MiR [Электронный ресурс]. – Режим доступа: https://www.mobile-industrial-robots.com/....
- Мобильные промышленные роботы / Автоматизация внутренних перевозок/ MiR600 [Электронный ресурс]. – Режим доступа: https://www.mobile-industrial-robots.com/mir600/....
- Автономные мобильные роботы/ OMRON [Электронный ресурс]. – Режим доступа: https://industrial.omron.ru/....
- Мобильные промышленные роботы / OMRON LD-60/90 [Электронный ресурс]. – Режим доступа: https://industrial.omron.ru/ld-60-90....
- Логистические роботы Ronavi [Электронный ресурс]. – Режим доступа: https://ronavi-robotics.ru/....
- Логистические роботы Ronavi Н1500 [Электронный ресурс]. – Режим доступа: https://ronavi-robotics.ru/h1500....
- Промышленные роботы KUKA [Электронный ресурс]. – Режим доступа: https://www.kuka.com/en-de....
- Промышленные роботы KUKA KMR QUANTEC [Электронный ресурс]. – Режим доступа: https://www.kuka.com/kmr-quantec....
- Рогаткин д.а., лапитан д.г. Ориентация автономного мобильного робота в помещении при помощи объектно-ориентированной карты местности с элементами модели мира // ползуновский вестник. 2015. №4-2. . – Режим доступа: URL:https://cyberleninka.ru/article/....
- Лаврентьев Е.Б., Кирпа В.Э. Локализация робота с помощью лидара // Молодой исследователь Дона. 2020. №1 (22). – Режим доступа: URL: https://cyberleninka.ru/article/....
- Миронов С. В., Юдин А. В. Система технического зрения в задачах навигации мобильных объектов // Программные продукты и системы. 2011. №1. – Режим доступа: URL: https://cyberleninka.ru/article/....
- Изюмов, А. А. Управление движением колесного мобильного робота с матипулятором по криволинейной траектории в условиях наличия препятствий / А. А. Изюмов, Н. Ю. Хабибулина, Ю. А. Шурыгин // Электронные средства и системы управления. Материалы докладов Международной научно-практической конференции. – 2020. – № 1-2. – С. 197-200. – EDN HQSHAQ.