
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Особливості робота з меканум-колесами
- 3. Мобільні роботи виробників
- 3.1 Mobile Industrial Robots
- 3.2 Мобільний робот OMRON
- 3.3 Мобільний робот Ronavi Robotics
- 3.4 Мобільний робот KUKA
- 4. Модернізація прототипу робота і розробка системи управління
- Висновки
- Перелік посилань
Вступ
Галузь робототехніки та інформатики в якості автономних мобільних роботів щільно зайняли нішу внутрішньовиробничої логістики. У різних сферах транспортування деталей, обладнання, для навантаження-вивантаження все частіше застосовуються роботи. Мобільні роботи здатні переміщатися в своїй середовищі, і не прив'язані до одного фізичного розташування. Також можуть функціонувати без участі людини, і рухатися по заданих маршрутах. Роботи збільшують продуктивність робочого процесу і оптимізують трудовитрати, що швидко окупає витрати на модернізацію виробництва.
Активно застосовуються у вивченні космосу, все частіше з'являються для побутового використання, як робот-пилосос. Так само в розважальних цілях, наприклад робот Cosmo, Anki, Vector.
Промислові роботи давно використовуються на підприємствах автомобілебудування, авіабудування, приладобудування. Вони виконують різноманітні функції, операції, серед яких зварювання, автоматичний контроль готової продукції, складання виробів, забір різних матеріалів для аналізу. Роботи використовуються працівниками спеціальних служб для пошуку постраждалих при надзвичайних ситуаціях, пошуку снарядів, розмінування, також застосовуються для зварювання всередині труби прокладених під автомобільними дорогами, для пошуку несправностей ЛЕП.
Аналізуючи тенденції розвитку робототехніки, можна уявити майбутнє, в якому роботи стануть незамінними помічниками для людей і їх повсякденному житті.
За допомогою наявних систем розробників, роботи вже мають штучний інтелект, системи GPS-навігації, відеокамери, ехолокатори, лідари, що дозволяє роботам відстежувати своє місце розташування і будувати карти місцевості, а на побудованих картах місцевості оператор може задавати маршрути для виконання завдань.
Метою роботи є модернізація прототипу мобільного робота на базі меканум – коліс, з можливістю створення карт місцевості за допомогою пакету ROS, розробки системи управління роботом з використанням Matlab, і візуалізацією переміщення.
1. Актуальність теми
Промислові роботи давно стали звичайним явищем на підприємствах автомобілебудування, авіабудування, приладобудування. Вони виконують різноманітні функції, операції, серед яких зварювання, автоматичний контроль готової продукції, складання виробів. Роботи використовуються працівниками спецслужб для пошуку постраждалих при надзвичайній ситуації, пошуку снарядів, розмінування.
Активно ведеться розробка і випуск на ринок роботів широкого вжитку для використання в побуті. Найбільш відомі приклади-робот-пилосос, автоматично виробляє прибирання приміщення.
На складах інтернет магазинів також починають активно застосовувати мобільних роботів. Це обумовлено у зв'язку з великою кількістю замовлень і щоб поліпшити логістику замовлень споживачів, застосовують роботів які здатні швидко знаходити потрібний товар і транспортувати його до подальшого навантаження і доставки замовлення споживачеві. Застосовують мобільних роботів, які автоматично сканують штриховий код і знаходять необхідний товар і доставляють його до пункту відправки та контролю товару.
2. Особливості робота з меканум-колесами
Через особливу конструкцію меканум-колеса, представленої на малюнку 1, мобільний робот може переміщатися в різні сторони, це досягається за рахунок зміни швидкості і напрямку обертання коліс.
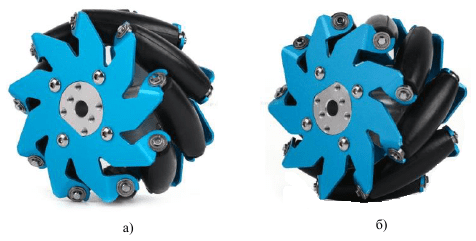
Малюнок 1 - Типова конструкція меканум-колеса: а) ліве колесо, б) праве колесо
Завдяки використанню такої конструкції коліс немає необхідності вбудовувати в мобільні роботи складних рульових механізмів і приводів і забезпечувати рульову функцію робота за рахунок використання здатності меканум – коліс рухатися в довільному напрямку.
Наприклад, щоб рухатися вперед, колеса повинні рухатися строго в одному напрямку. Для розвороту на 180 градусів колеса повинні обертатися вправо в різних напрямках. А коли передні і задні колеса обертаються в протилежних напрямках, робот переміститься в сторону.
Малюнок 2 - Різні способи руху
(анімація: 25 кадрів, циклів нескінченно, 125 кілобайт)
Таким чином, транспортний засіб яке забезпечено приводом з використанням меканум – коліс, має 3 ступеня свободи, які складаються з обертання колеса, обертання ролика і обертального ковзання навколо вертикальної осі.
3. Мобільні роботи виробників
3.1 Mobile Industrial Robots
Компанія розташована в Данії випускає мобільних роботів різної вантажопідйомністю і забезпечує безпечну взаємодію з людьми, уникає статичні і динамічні перешкоди, відповідає стандартам безпеки. Кожен робот може комплектуватися додатковими модулями і роботизованим маніпулятором. Здатний працювати цілодобово з періодичною підзарядкою акумуляторної батареї [1].
Адаптується до складної геометрії приміщень. Дверні прорізи, вузькі проходи і ліфти не заважають його пересуванню. Постановка завдань і управління здійснюються завантаженням CAD-файлів або введенням прямого програмного коду через веб-інтерфейс.
Різні моделі відрізняються здатністю будувати ефективний безпечний маршрут між точками відправлення і доставки. Оснащуються 3D-камерами, працюють за технологією лазерного сканування, розрізняє об'єкти, недоступні до диференціації іншими роботами.

Малюнок 3 - Мобільний робот MiR600 [2]
3.2 Мобільний робот OMRON
Японська компанія OMRON випускає мобільні роботи різної вантажопідйомністю. У більшості моделей здатні, розрахувавши оптимальний шлях, переміщатися в складних умовах завантажених обладнанням цехів, включаючи тісні проходи, в місцях з жвавим рухом персоналу. [3].
Для такого повністю автономного транспорту не потрібна попередня підготовка маршрутів, така як установка магнітів і маяків для орієнтації в просторі. Мобільні роботи OMRON призначені для роботи в автомобільній та харчовій промисловості, мікроелектроніці та логістиці, медицині та сфері споживчих товарів.

Малюнок 4 - Мобільний робот OMRON LD-60/90 [4]
3.3 Мобільний робот Ronavi Robotics
Компанія Ronavi Robotics-єдиний російський розробник і виробник серійних логістичних роботів, призначених для автономної роботи на складах. Ronavi була створена, коли світового ринку логістичних роботів ще не існувало, а сьогодні займає на цьому ринку одну з десяти лідируючих позицій [5].
Роботизація складів знижує витрати в масштабній онлайн-торгівлі: немає необхідності платити за освітлення, тепло, кондиціонування. У той же час люди, які раніше працювали на складах, з поширенням логістичних роботів можуть зайнятися творчою працею, а доступний обсяг зберігання на складах збільшується в три — п'ять разів.
Сьогодні російський робот-ЛОГІСТИК здатний перевозити вантаж вагою до 1500 кг, пересуваючись по складу зі швидкістю до 5 км на годину і використовуючи для руху QR-мітки. Машини Ronavi Robotics можуть самостійно заряджатися, і будь-яку їх кількість можна об'єднати в «групу».
Компанія пропонує роботизувати склади по моделі«робот як сервіс». Передплатна модель дозволяє власникам складів роботизувати склад без капітальних витрат: в рамках підписки здійснюється інтеграція групи роботів в ERP клієнтів і цілодобовий сервіс AMR. Така бізнес-модель доступна для Ronavi H1500 (рисунок 5) вантажопідйомністю до 1500 кг. Ці роботи сумісні з палетним і стелажним зберіганням [6].
Малюнок 5 - Логістичний робот Ronavi H1500
3.4 Мобільний робот KUKA
Німецький виробник промислових роботів і систем автоматизації виробництва. Надійне пересування забезпечується за рахунок вбудованого програмного забезпечення і системи управління. Переміщення з точністю до міліметра здійснюється за допомогою вбудованих лазерних сканерів, що дозволяє мобільному роботу KUKA самостійно контролювати своє оточення і безпечно об'їжджає людей або перешкоди [7].
Потужні акумуляторні батареї забезпечують автономне живлення на платформі. Завдяки бездротовій технології для промислового застосування система вільно переміщається в своїй робочій зоні.
Мобільна платформа KUKA omniMove має стандартну вантажопідйомність 7000 кг.це дозволяє використовувати для маніпулювання особливо великих і важких деталей. Незважаючи на велику вантажопідйомність він досягає точності позиціонування +/- 5 мм – незалежно від вже пройденої відстані. Завдяки багатонаправленої технології колеса KUKA він впевнено пересувається до наміченої мети навіть в умовах обмеженого простору.
KR QUANTEC (малюнок 6) може переміщатися у всіх напрямках завдяки спеціальній технології приводу KUKA omniMove: кожне колесо складається з окремих роликів бочкоподібної форми. Вони укладені в два нерухомих обода, які не торкаються землі. Кожне колесо може рухатися незалежно від інших. Це означає, що KR QUANTEC також може рухатися вбік, по діагоналі і навіть по колу. У результаті ним можна безпечно і точно управляти навіть в самих обмежених умовах [8].

Малюнок 6 - Промисловий робот KUKA KMR QUANTEC
4. Модернізація прототипу робота і розробка системи управління
Для модернізації розробленого прототипу необхідно розробити алгоритм уникнення перешкод щоб він відповідав вимогам: прототип платформи повинен будувати сам карту місцевості і зберігати в пам'яті для подальшого її застосування; проводити обчислення свого положення в просторі – для обчислення координат положення самої платформи і пункту призначення; виконувати і шукати найкоротший шлях для переміщення в просторі; уникати як статичні, так і динамічні перешкоди.
Способи і реалізації управління колісними мобільними роботами:
Спосіб 1. Рух платформи по лінії. На підлозі наноситься лінія, по якій платформа рухається. Використовуються оптичні датчики, які стежать за лінією, і подаються команди на рух. При поворотах платформа може рухатися боком, або по діагоналі, або розвертатися на місці на кут 90° і продовжувати слідувати по лінії. Дане рішення можна застосувати на будь-якому підприємстві, наприклад для підвезення деталей до робочих місць працівників, які працюють на конвеєрі. Перевагою цього способу є те, що при проходженні по лінії платформа може переміщатися по заданій траєкторії (траєкторія є видимою Збройним оком для інших користувачів і не буде виникати конфузних ситуаціях, якщо йде людина не помітить платформу), так само рух платформи не залежить від наявності джерела світла. З недоліків можна відзначити те, що якщо пошкодиться будь-якої ділянку нанесеної лінії, то платформа втратить траєкторію і може зупинитися, немає можливості об'їзду перешкод.
Спосіб 2. Апаратно-програмний модуль автономного мобільного робота для орієнтації в приміщенні кімнатного типу [9]. Для орієнтації застосовуються датчики відстані і одометрії з можливістю розпізнавання приміщень за їх характерними метричними ознаками, закладених у внутрішню модель світу робота. Дана реалізація передбачає створення віртуальних приміщень (без меблів) з їх розмірами як реальними, так і з урахуванням похибки датчиків вимірювань.
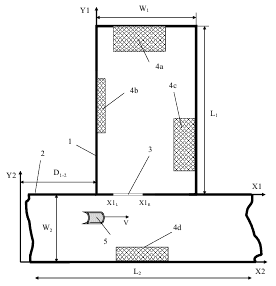
Малюнок 7 - Принцип формування об'єктно-орієнтованої карти приміщення. Основні елементи: 1-кімната, 2-коридор, 3-прохід, 4-меблі, 5-візок автономного мобільного робота
Для орієнтації платформа розраховує своє положення виходячи з розмірів кімнати і визначає в якій кімнаті знаходиться. Після визначення координат положення в приміщенні і визначення номера кімнати платформа почне рух до дверного проходу. Коли показання з бічних датчиків виконають умову (ширина кімнати, по якій слід робот зміниться в більшу сторону) платформа звірить координати з картою і визначити що це дверний прохід в іншу кімнату. Платформа розгорнеться і почне рухатися в іншу кімнату, коли платформа перетне дверний отвір значення координати y застосовується нулю, а платформа продовжить рух на певну відстань і зупиниться, далі почнеться процес визначення координат платформи і порівняння результатів вимірювання із заданими. Переваги: немає необхідності наносити лінію траєкторії. Недоліки: складність побудови карти приміщення.
Спосіб 3. Локалізація робота за допомогою лідара. У статті описується спосіб локалізації мобільного робота в недетермінованому 2D-просторі, грунтуючись на використанні методу одночасної локалізації та побудови карти (SLAM) [10].
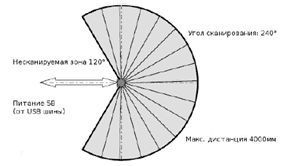
Малюнок 8 - Параметри лідара HOKUYO URG-04LX-UG01
З лідара отримують одновимірний масив, що складається зі значень відстаней і відповідних кутів (тобто дані передаються в полярній системі координат). За допомогою математичного блоку отримані дані переводяться з полярної системи в декартову систему координат. Якщо на шляху проходження робота виникає перешкода, робот перевіряє, чи є перешкода з іншого боку, наприклад, якщо робот рухається прямо і у нього на шляху з'явилася перешкода, він перевіряє, чи є перешкода справа або зліва, якщо немає, то він об'їде перешкоду зліва чи справа. Але якщо зліва знаходиться стіна, то робот вибере шлях для об'їзду перешкоди справа. Переваги: немає необхідності створювати карту місцевості і поміщати її в мікроконтролер, досить точно визначаються координати в просторі, немає необхідності використовувати одометрію, успішно долає статичні перешкоди. Недоліки: не підходить для середовища з динамічними перешкодами.
Спосіб 4. Комп'ютерний зір [11]. Даний спосіб підійде наприклад, в складському або розподільному центрі, в якому замість людей працюють безліч таких робоплатформа. Завдяки комп'ютерному (технічному) зору і використання нейромережі можливо навчити робота розпізнавати собі подібних для запобігання зіткнень, а також для розпізнавання потрібних предметів для переміщення їх наприклад, на стрічку конвеєра. Переваги: здатність об'їзду перешкод, точне позиціонування. Недоліки: складність реалізації, дорожнеча.
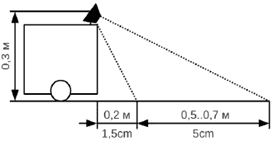
Малюнок 9 - Схема розміщення камери
Спосіб 5. Управління рухом колісного мобільного робота по криволінійній траєкторії в умовах наявності перешкод [12]. У статті пропонується застосувати «динамічне планування», що дозволяє розділити на три вузьконаправлені завдання: 1) рух робота при відсутності перешкод; 2) рух робота при наявності статичних перешкод; 3) рух робота при динамічних перешкодах. Переваги: здатність об'їзду динамічних перешкод. Недоліки: визначення координат перешкод.
Висновки
Вивчивши матеріал можна відзначити, що мобільні роботи можуть застосовуватися в різних галузях людської діяльності. Для того щоб робот міг рухатися і виконувати поставлені завдання, необхідно розуміти які механізми можуть йому в цьому допомогти. Для цього роботи забезпечуються різними датчиками, обладнанням, у вигляді програм заносяться необхідні знання і вміння, також робот повинен відрізнятися високою надійністю і безпекою для людини.
Завдяки конструкції меканум-коліс робот має можливість пересуватися у всіх напрямках, при цьому не використовуючи складних рульових механізмів. Це дає перевагу в пересуванні в обмеженому просторі, в порівнянні з колісними аналогами.
Для модернізації з перерахованих способів найбільш підходящий для нашої задачі є локалізація за допомогою лідара. Це дозволить уникати перешкоди в реальному часі, а також будувати карту приміщення і зберігати її для подальшого застосування для завдання оператором кінцевої точки.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: червень 2023 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після вказаної дати.
Перелік посилань
- Мобильные промышленные роботы / Автоматизация внутренних перевозок/ MiR [Электронный ресурс]. – Режим доступа: https://www.mobile-industrial-robots.com/....
- Мобильные промышленные роботы / Автоматизация внутренних перевозок/ MiR600 [Электронный ресурс]. – Режим доступа: https://www.mobile-industrial-robots.com/mir600/....
- Автономные мобильные роботы/ OMRON [Электронный ресурс]. – Режим доступа: https://industrial.omron.ru/....
- Мобильные промышленные роботы / OMRON LD-60/90 [Электронный ресурс]. – Режим доступа: https://industrial.omron.ru/ld-60-90....
- Логистические роботы Ronavi [Электронный ресурс]. – Режим доступа: https://ronavi-robotics.ru/....
- Логистические роботы Ronavi Н1500 [Электронный ресурс]. – Режим доступа: https://ronavi-robotics.ru/h1500....
- Промышленные роботы KUKA [Электронный ресурс]. – Режим доступа: https://www.kuka.com/en-de....
- Промышленные роботы KUKA KMR QUANTEC [Электронный ресурс]. – Режим доступа: https://www.kuka.com/kmr-quantec....
- Рогаткин д.а., лапитан д.г. Ориентация автономного мобильного робота в помещении при помощи объектно-ориентированной карты местности с элементами модели мира // ползуновский вестник. 2015. №4-2. . – Режим доступа: URL:https://cyberleninka.ru/article/....
- Лаврентьев Е.Б., Кирпа В.Э. Локализация робота с помощью лидара // Молодой исследователь Дона. 2020. №1 (22). – Режим доступа: URL: https://cyberleninka.ru/article/....
- Миронов С. В., Юдин А. В. Система технического зрения в задачах навигации мобильных объектов // Программные продукты и системы. 2011. №1. – Режим доступа: URL: https://cyberleninka.ru/article/....
- Изюмов, А. А. Управление движением колесного мобильного робота с матипулятором по криволинейной траектории в условиях наличия препятствий / А. А. Изюмов, Н. Ю. Хабибулина, Ю. А. Шурыгин // Электронные средства и системы управления. Материалы докладов Международной научно-практической конференции. – 2020. – № 1-2. – С. 197-200. – EDN HQSHAQ.